
一种复杂场景下的设备标签内容识别方法及系统.pdf

一只****签网

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种复杂场景下的设备标签内容识别方法及系统.pdf
本发明公开了一种复杂场景下的设备标签内容识别方法及系统;其中,所述方法,包括:获取待识别的设备标签图像,对待识别的设备标签图像进行旋转矫正;对矫正后的图像,进行设备标签区域检测和设备标签分类,对设备标签区域进行裁剪,得到设备标签区域图像;对设备标签区域图像,进行边缘检测和透视变换,对设备标签区域图像进行位置修正;对修正后的设备标签区域图像,进行文字区域检测和文字识别;对文字识别结果进行后处理,输出结构化和非结构化文字识别结果。
一种复杂场景下的人流量统计识别方法及系统.pdf
本发明提出了一种复杂场景下的人流量统计识别方法及系统,属于人流量监测的技术领域。其中方法包括:步骤1、通过信息采集设备获取当前监测区域的视频信息;步骤2、根据按视频帧读取的方式获取视频信息中的每一帧图像数据;步骤3、构建目标检测模型;步骤4、利用目标检测模型对步骤2图像数据中的目标进行识别检测;步骤5、构建轨迹跟踪模型;步骤6、利用轨迹跟踪模型对步骤4中的识别检测结果进行信息关联,获得目标的轨迹信息;步骤7、根据轨迹信息获得目标在监测区域中消失时间点;步骤8、根据目标的出现和消失,完成计数。本发明针对实际
一种复杂场景下实时视频多人行为识别方法及系统.pdf
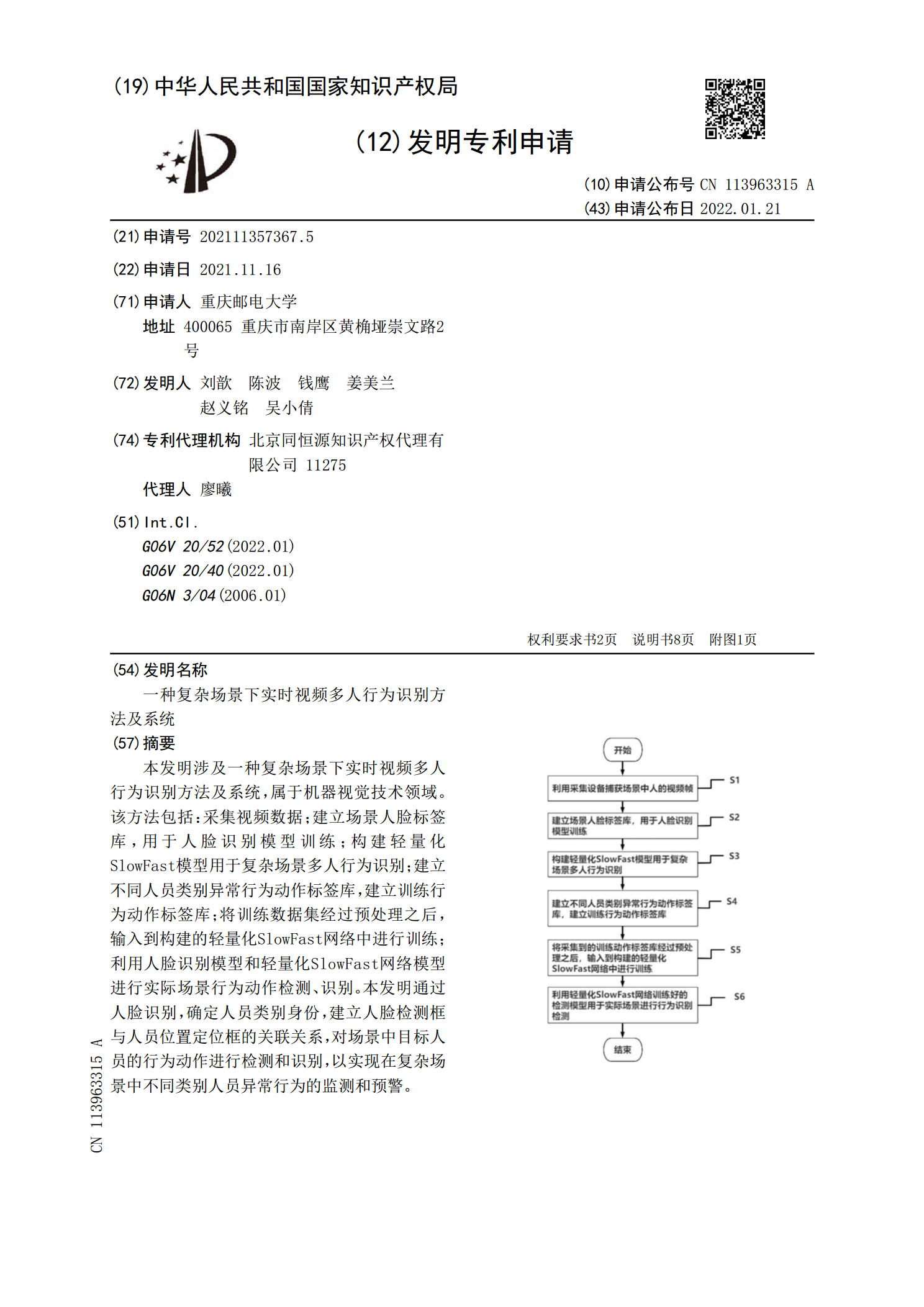
本发明涉及一种复杂场景下实时视频多人行为识别方法及系统,属于机器视觉技术领域。该方法包括:采集视频数据;建立场景人脸标签库,用于人脸识别模型训练;构建轻量化SlowFast模型用于复杂场景多人行为识别;建立不同人员类别异常行为动作标签库,建立训练行为动作标签库;将训练数据集经过预处理之后,输入到构建的轻量化SlowFast网络中进行训练;利用人脸识别模型和轻量化SlowFast网络模型进行实际场景行为动作检测、识别。本发明通过人脸识别,确定人员类别身份,建立人脸检测框与人员位置定位框的关联关系,对场景中目

复杂场景下Logo识别方法的研究.docx
复杂场景下Logo识别方法的研究随着计算机视觉技术的不断发展,对于复杂场景下的Logo识别方法也越来越成熟和可靠。Logo作为公司品牌标识的重要组成部分,在商业营销中具有非常重要的作用,因此,对于Logo的识别具有非常重要的意义。在本文中,我们将讨论复杂场景下Logo识别方法的研究。首先,复杂场景下Logo识别面临的挑战是多方面的。首先,由于复杂场景下的光照、背景、遮挡等因素的影响,Logo的图像质量可能很差,导致识别的准确率下降。其次,不同公司的Logo具有不同的形状、颜色和纹理等特征,这使得Logo识

复杂场景下的人体头部识别方法.doc
说明书复杂场景下的人体头部识别方法技术领域本发明涉及一种视频分析技术,具体的说是一种在有摄像机获取的复杂场景下的人体头部识别方法。在普通视频监控中,人群的行进多出现相互遮挡、重叠现象,不便于单独人体的识别与跟踪。为避免这种现象,提高计数精度,现有基于视频的客流统计系统往往要求摄像头垂直向下照射。其缺点是需要独立安装摄像头,适应性差,不兼容于原有监控系统。而且垂直角度摄像头取得视频信息量少,达不到监控目的。普通监控设备一般安装于高处,与水平成30~70度夹角。在人群监控过程中