
电脑横机织物密度调节上位机系统及调节方法.pdf

婀娜****aj

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电脑横机织物密度调节上位机系统及调节方法.pdf
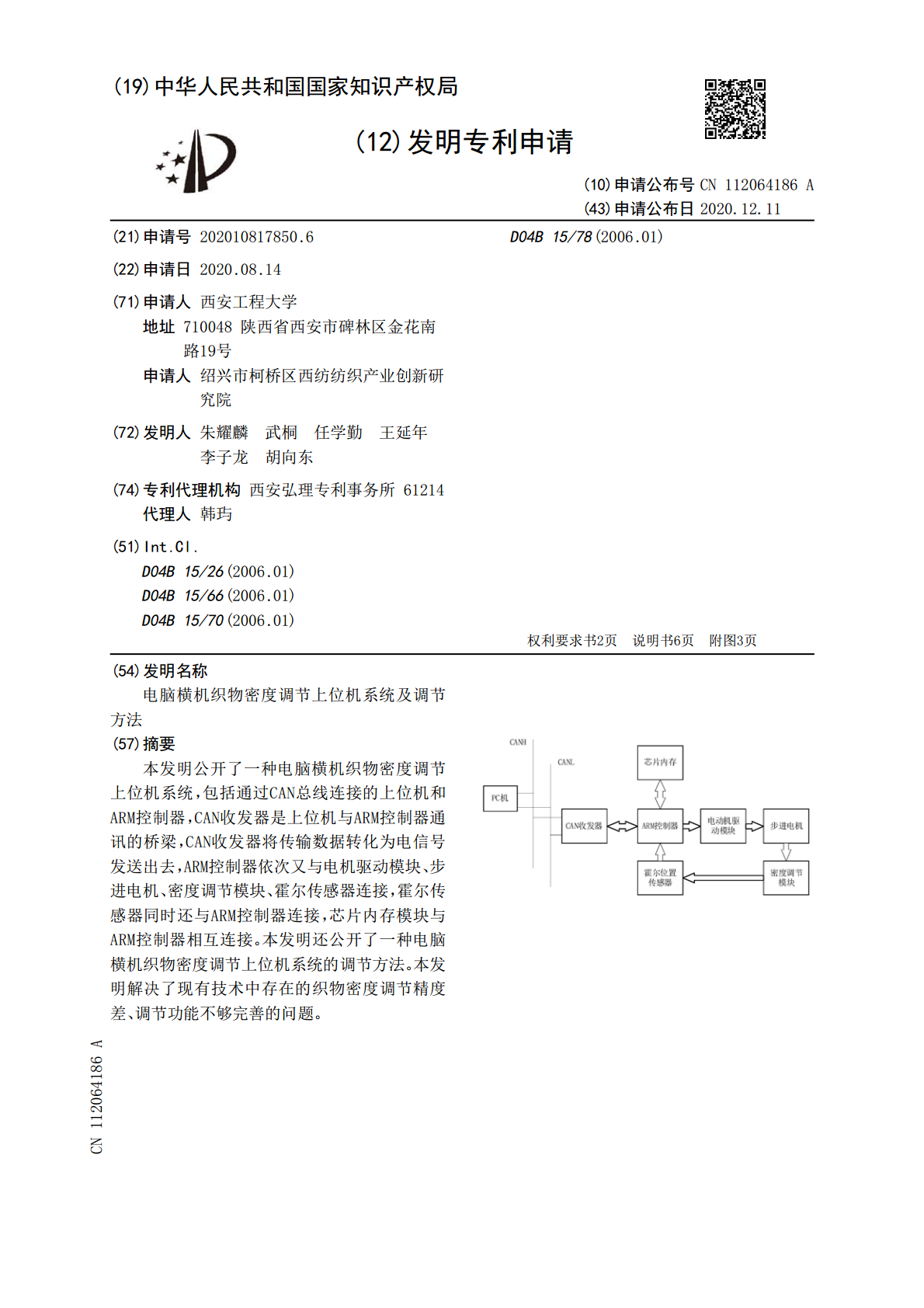
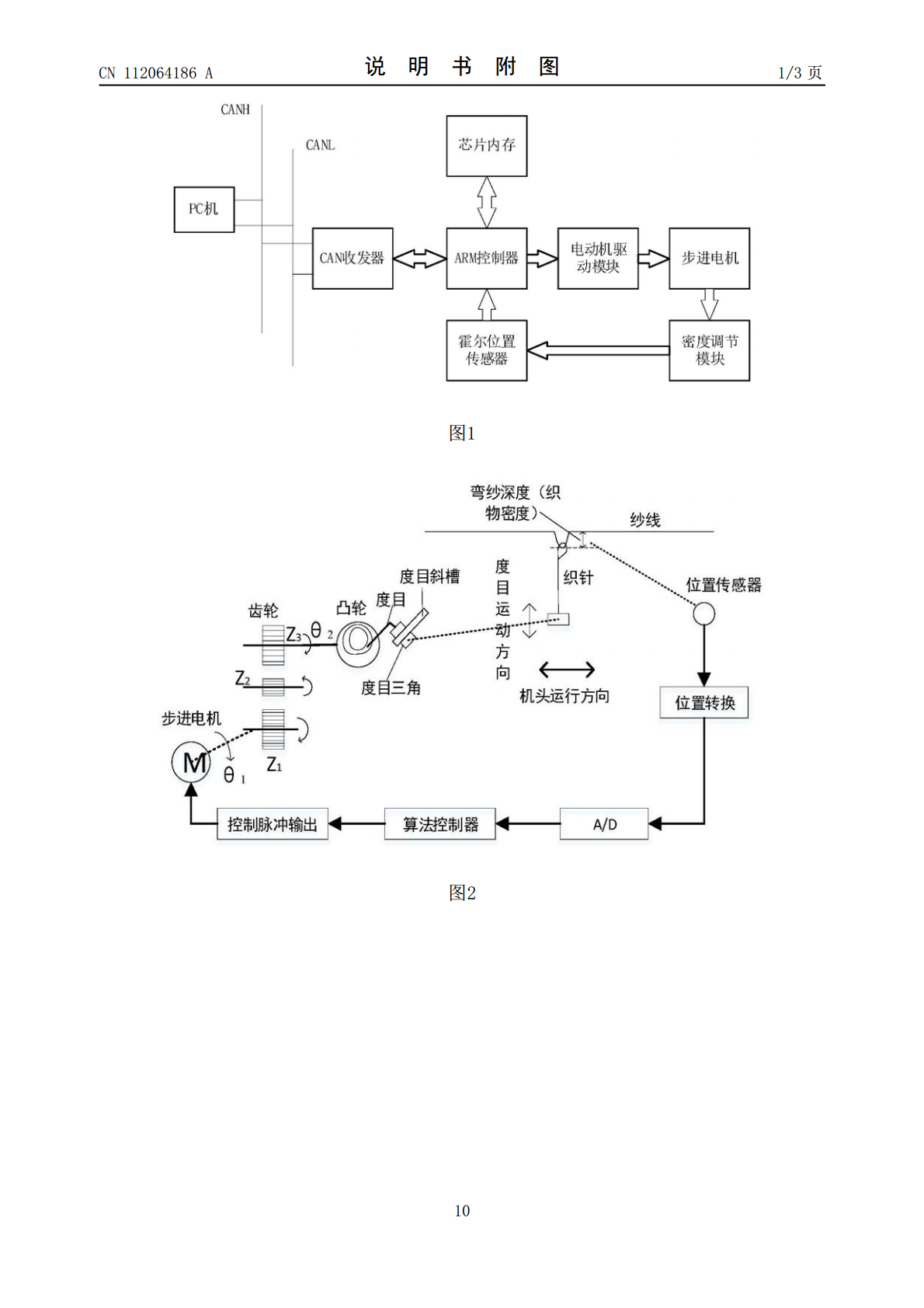
本发明公开了一种电脑横机织物密度调节上位机系统,包括通过CAN总线连接的上位机和ARM控制器,CAN收发器是上位机与ARM控制器通讯的桥梁,CAN收发器将传输数据转化为电信号发送出去,ARM控制器依次又与电机驱动模块、步进电机、密度调节模块、霍尔传感器连接,霍尔传感器同时还与ARM控制器连接,芯片内存模块与ARM控制器相互连接。本发明还公开了一种电脑横机织物密度调节上位机系统的调节方法。本发明解决了现有技术中存在的织物密度调节精度差、调节功能不够完善的问题。

一种电脑编织横机的密度调节装置.pdf
本发明提供一种运行稳定性好、对织物密度调节效果好的电脑编织横机的密度调节装置,包括三角底板、密度曲线盘、驱动密度曲线盘的步进电机以及用于调节编织密度的密度三角,密度三角通过联动机构跟随密度曲线盘运动,联动机构包括中部铰接的密度三角连接块和夹紧联动板,密度三角连接块和夹紧联动板各自一端设有轴承,密度曲线盘上设有曲线环,两轴承分别抵靠在曲线环的内外边缘,密度三角连接块和夹紧联动板各自另一端设有使得两轴承夹紧曲线环的弹性夹紧机构。本发明密度曲线盘被两轴承夹紧,密度三角运行稳定并防止密度三角受意外超负舌针冲击力度

基于Qt的电脑横机上位机系统.docx
基于Qt的电脑横机上位机系统随着现代工业的发展,越来越多的工作需要电脑来完成,而在这些电脑工作中,上位机系统起着至关重要的作用。针对这一需求,我们使用Qt框架来开发一款电脑上位机系统。本文将介绍我们的系统设计思路、实现过程以及系统的功能优点等方面。一、系统设计1.面向对象设计思路Qt框架是一个非常适合面向对象设计的框架,所以在设计系统时我们采用了这样的思想,将每一个功能模块抽象成一个类,并构建出整个系统的类层次结构。同时,在各个模块设计中我们注意要符合“单一职责原则”和“开闭原则”,以让我们的系统更加健壮

横机的张力调节装置.pdf
本发明涉及纺织机械领域,特别是一种横机的张力调节装置,包括纱筒、导线环,位于导线环后的针板和位于针板上的横机机头;所述导线环与所述纱筒之间接有一个张力调节机构,所述张力调节机构包括第一支架、设于第一支架上的过线辊、设于过线辊上方并与过线辊相切的限位辊;所述第一支架设于移动板上,移动板通过弹性装置固定在地面上;所述限位辊设于第二支架上,所述第二支架固定在支杆上,支杆设于所述移动板一侧。采用上述结构后,通过设于导线环与纱筒之间张力调节装置,在供给横机纱线之间对纱线上的张力进行检测、调节,保证了下一道工序的顺利

织物密度调节装置.pdf
本发明公开了织物密度调节装置,包括一密度电机,密度电机带动一度目凸轮,度目凸轮带动度目控制杆,度目控制杆带动与其销轴连接的度目连接块,度目连接块带动度目引导块运动,还包括一扭簧、扭簧销和固定座,所述扭簧、扭簧销和固定座位于度目连接块的一侧,与度目控制杆相对;扭簧安装在扭簧销上,一端接触度目连接块,一端接触固定座。本发明可以稳定度目三角的位置。