
一种全自动的畜牧养殖用畜牧投喂设备及其投喂方法.pdf

羽沫****魔王

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种全自动的畜牧养殖用畜牧投喂设备及其投喂方法.pdf
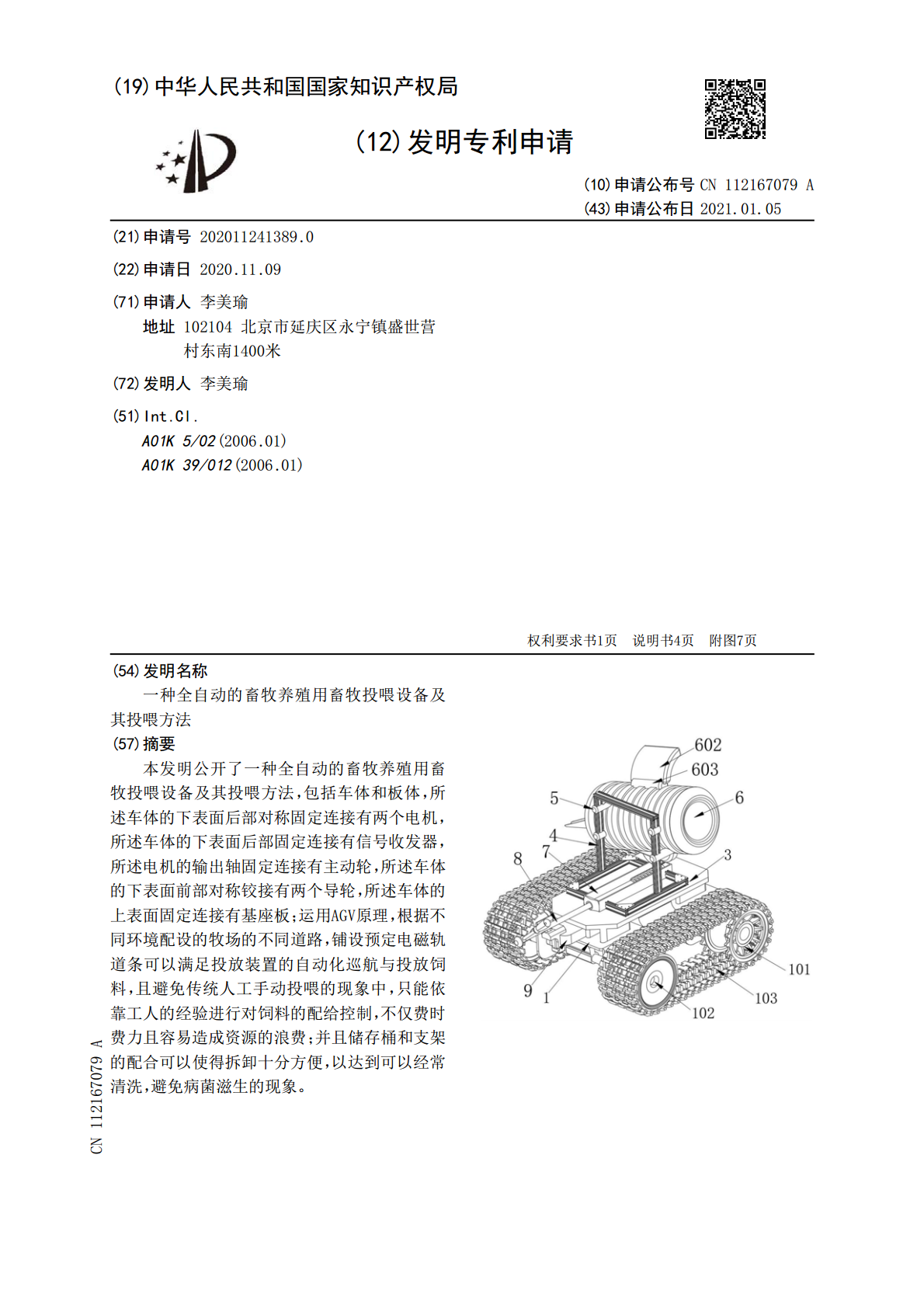
本发明公开了一种全自动的畜牧养殖用畜牧投喂设备及其投喂方法,包括车体和板体,所述车体的下表面后部对称固定连接有两个电机,所述车体的下表面后部固定连接有信号收发器,所述电机的输出轴固定连接有主动轮,所述车体的下表面前部对称铰接有两个导轮,所述车体的上表面固定连接有基座板;运用AGV原理,根据不同环境配设的牧场的不同道路,铺设预定电磁轨道条可以满足投放装置的自动化巡航与投放饲料,且避免传统人工手动投喂的现象中,只能依靠工人的经验进行对饲料的配给控制,不仅费时费力且容易造成资源的浪费;并且储存桶和支架的配合可以
一种水产养殖用自动投喂装置及其投喂方法.pdf
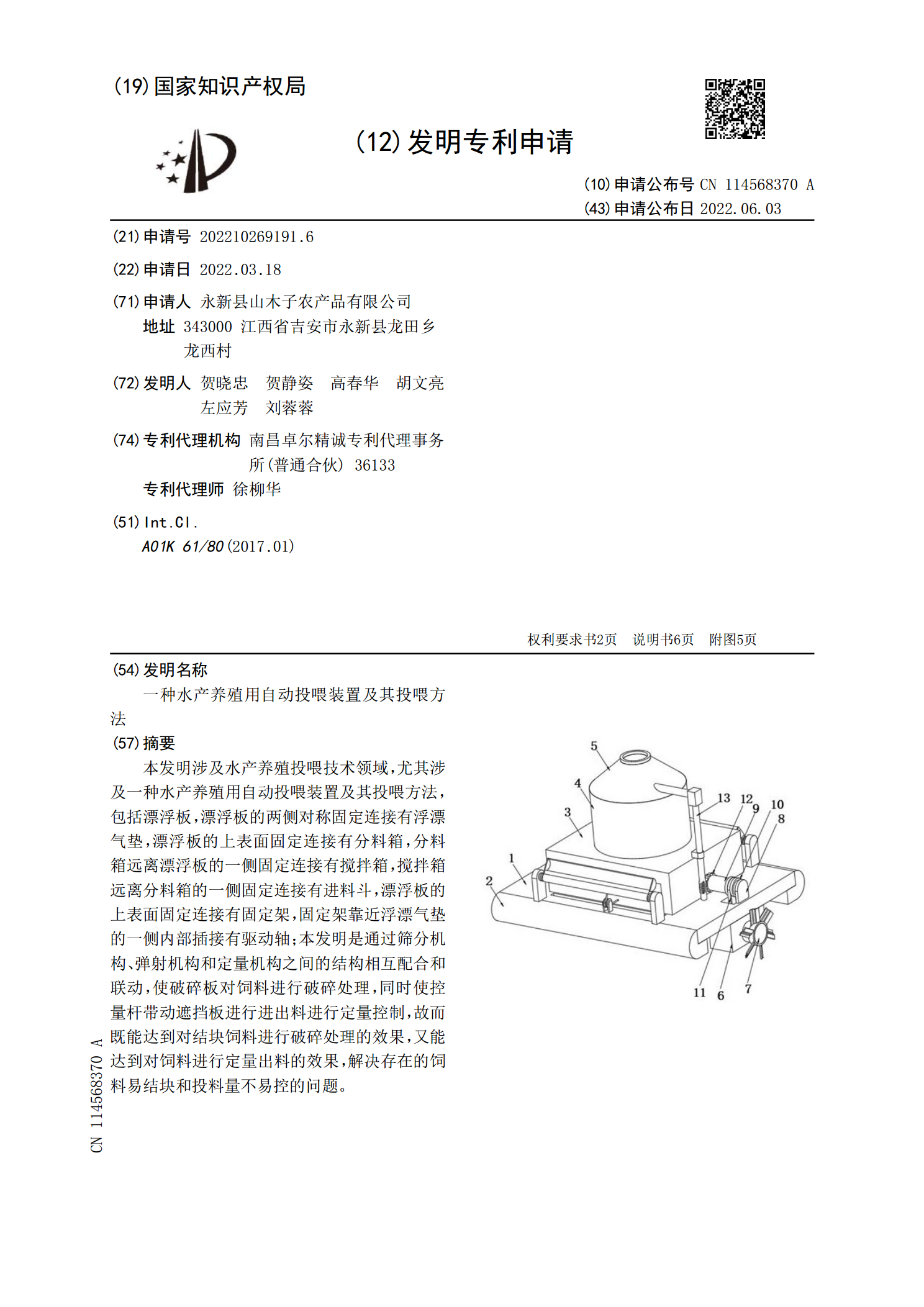
本发明涉及水产养殖投喂技术领域,尤其涉及一种水产养殖用自动投喂装置及其投喂方法,包括漂浮板,漂浮板的两侧对称固定连接有浮漂气垫,漂浮板的上表面固定连接有分料箱,分料箱远离漂浮板的一侧固定连接有搅拌箱,搅拌箱远离分料箱的一侧固定连接有进料斗,漂浮板的上表面固定连接有固定架,固定架靠近浮漂气垫的一侧内部插接有驱动轴;本发明是通过筛分机构、弹射机构和定量机构之间的结构相互配合和联动,使破碎板对饲料进行破碎处理,同时使控量杆带动遮挡板进行进出料进行定量控制,故而既能达到对结块饲料进行破碎处理的效果,又能达到对饲料

一种畜牧养殖用饲料投喂装置.pdf
本发明公开了一种畜牧养殖用饲料投喂装置,包括底板,所述底板上竖直固定安装有立板,立板上水平固定安装有水平板;驱动轴下端通过轴承转动式与搅拌桶底部连接,转轴上转动式有下料挡盘,下料挡盘上竖直开设有与通孔相对应的下落孔,从动轴上同轴固定安装有与从动外齿圈啮合连接的主动齿轮;立板上转动式设有与主动锥齿轮啮合的从动锥齿轮,从动锥齿轮上同轴固定安装有盘形凸轮;本发明结构巧妙,操作方便,通过拨板的转动实现对饲料的自动投撒,劳动强度低,劳动量小,当下料挡盘转动到下落孔与通孔重合时,饲料下落到存料槽内部,进而实现的饲料间
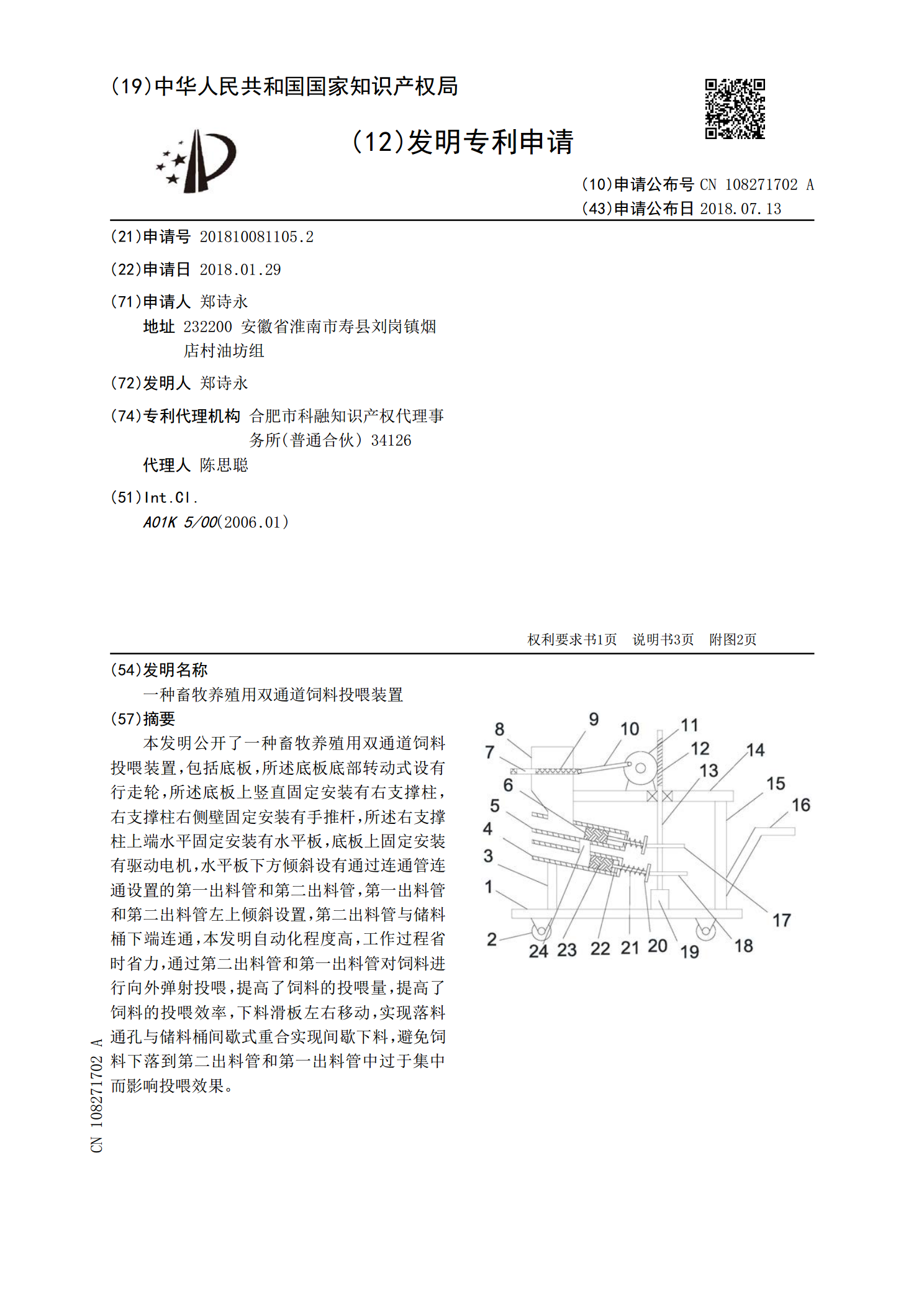
一种畜牧养殖用双通道饲料投喂装置.pdf
本发明公开了一种畜牧养殖用双通道饲料投喂装置,包括底板,所述底板底部转动式设有行走轮,所述底板上竖直固定安装有右支撑柱,右支撑柱右侧壁固定安装有手推杆,所述右支撑柱上端水平固定安装有水平板,底板上固定安装有驱动电机,水平板下方倾斜设有通过连通管连通设置的第一出料管和第二出料管,第一出料管和第二出料管左上倾斜设置,第二出料管与储料桶下端连通,本发明自动化程度高,工作过程省时省力,通过第二出料管和第一出料管对饲料进行向外弹射投喂,提高了饲料的投喂量,提高了饲料的投喂效率,下料滑板左右移动,实现落料通孔与储料桶
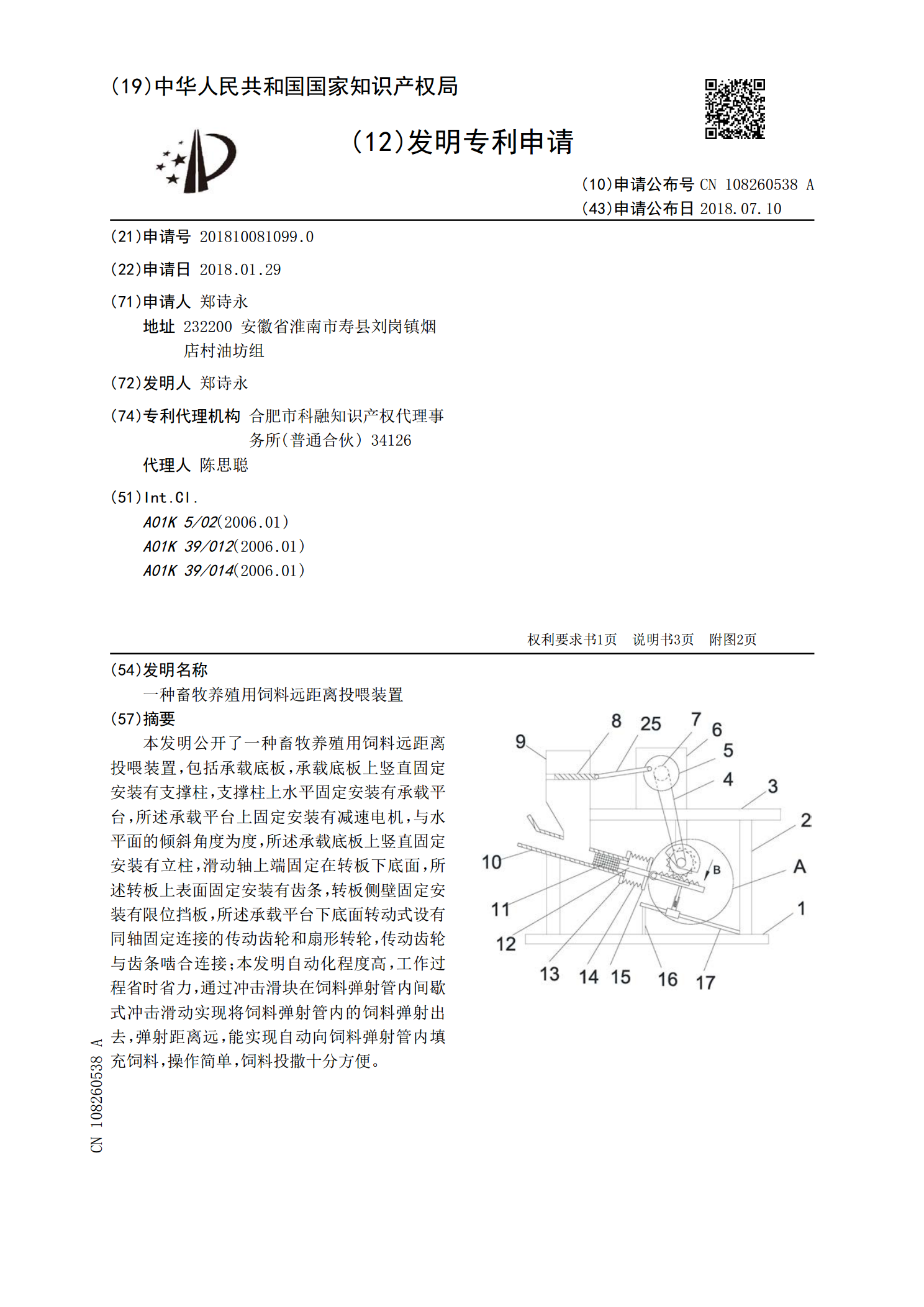
一种畜牧养殖用饲料远距离投喂装置.pdf
本发明公开了一种畜牧养殖用饲料远距离投喂装置,包括承载底板,承载底板上竖直固定安装有支撑柱,支撑柱上水平固定安装有承载平台,所述承载平台上固定安装有减速电机,与水平面的倾斜角度为度,所述承载底板上竖直固定安装有立柱,滑动轴上端固定在转板下底面,所述转板上表面固定安装有齿条,转板侧壁固定安装有限位挡板,所述承载平台下底面转动式设有同轴固定连接的传动齿轮和扇形转轮,传动齿轮与齿条啮合连接;本发明自动化程度高,工作过程省时省力,通过冲击滑块在饲料弹射管内间歇式冲击滑动实现将饲料弹射管内的饲料弹射出去,弹射距离远