
基于GPS的实时计亩方法.pdf

小忆****ng

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于GPS的实时计亩方法.pdf
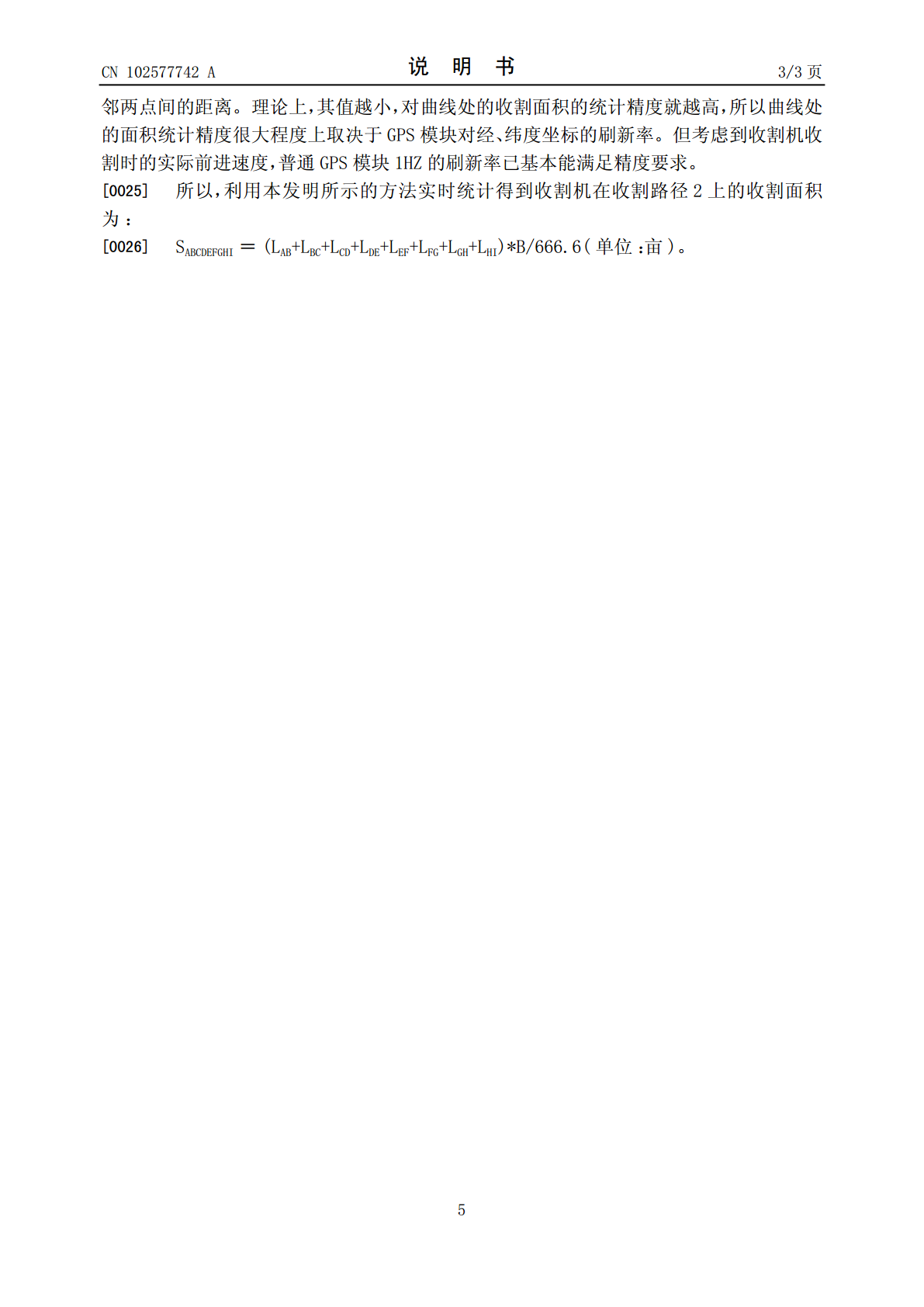
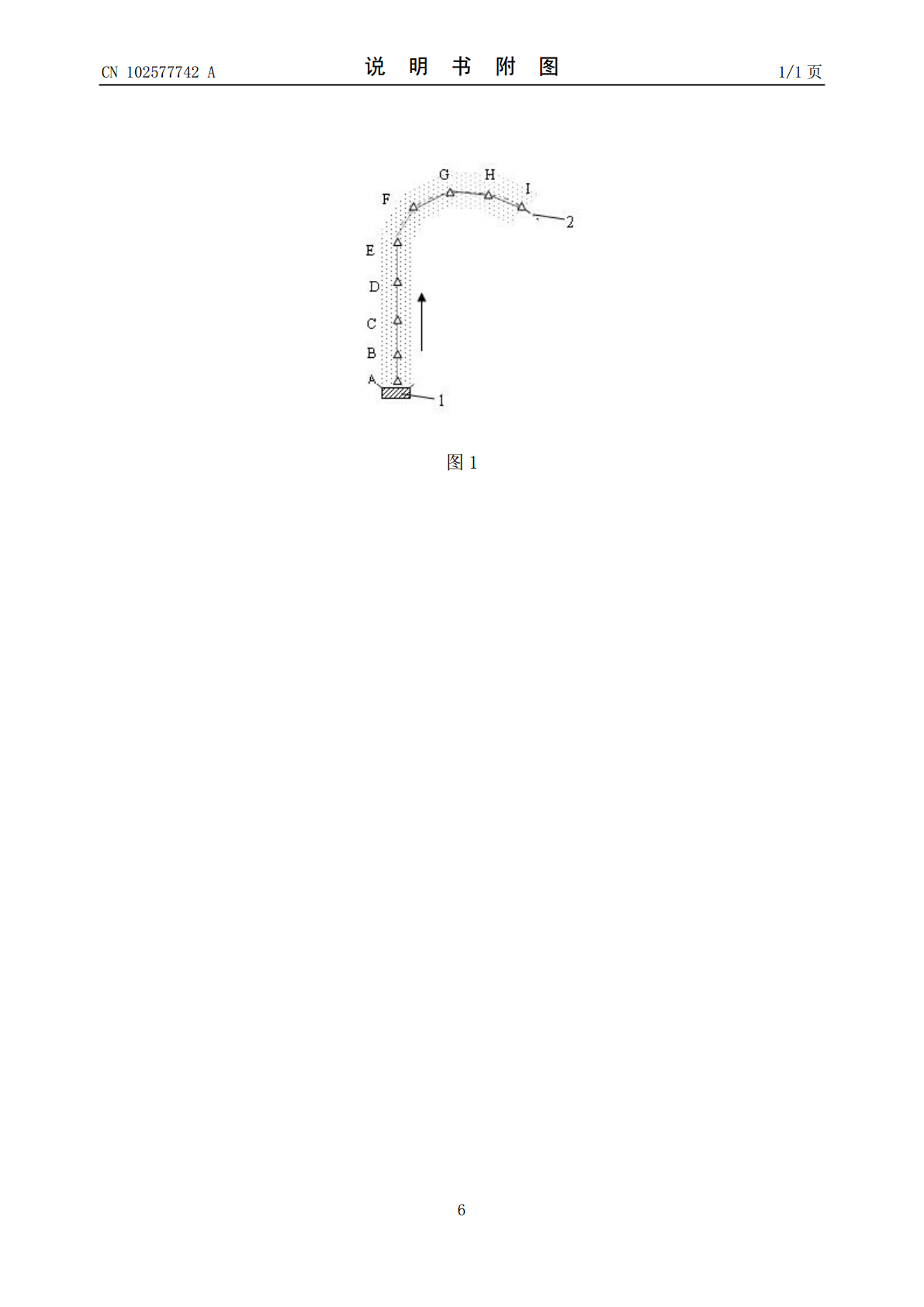
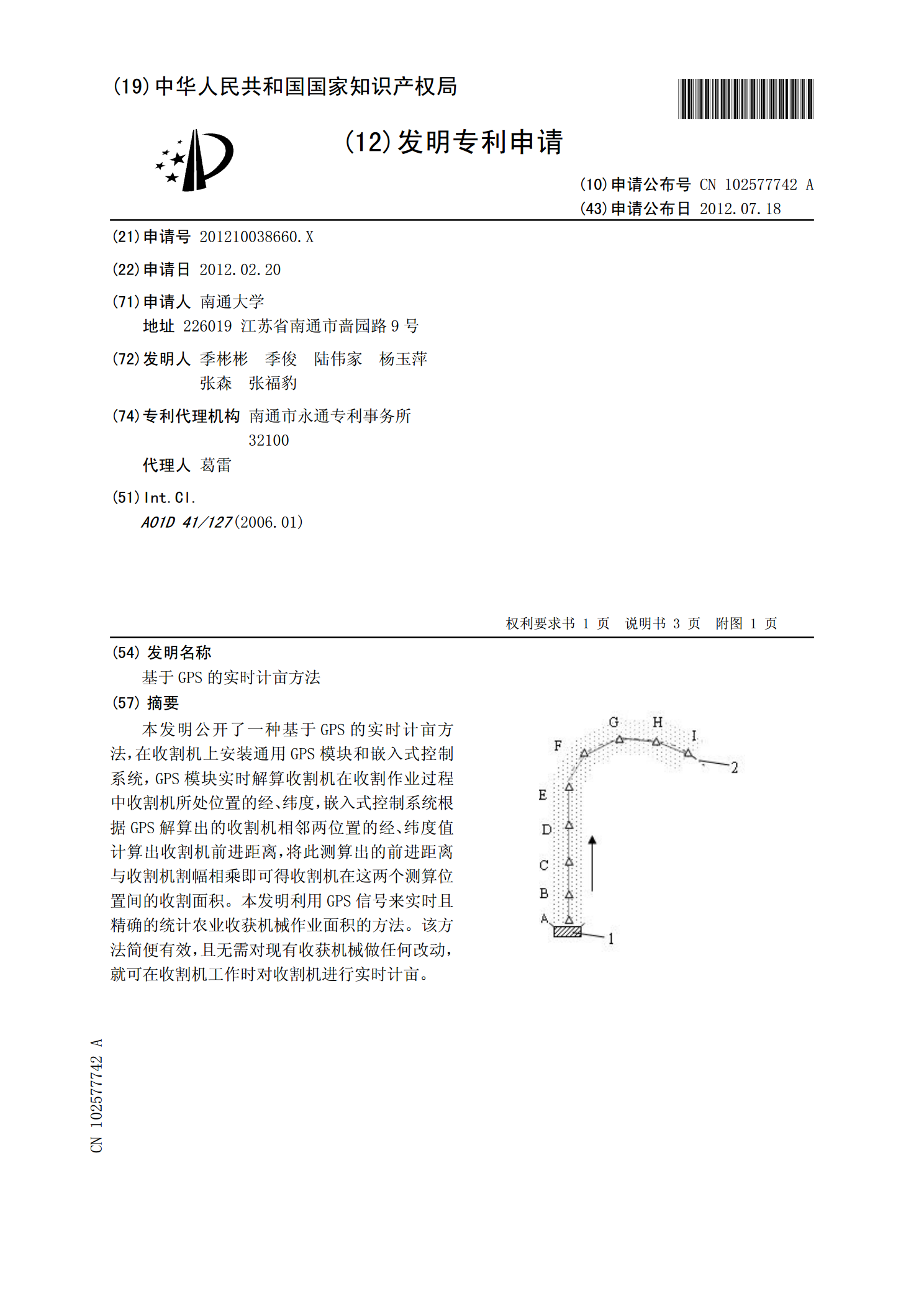
本发明公开了一种基于GPS的实时计亩方法,在收割机上安装通用GPS模块和嵌入式控制系统,GPS模块实时解算收割机在收割作业过程中收割机所处位置的经、纬度,嵌入式控制系统根据GPS解算出的收割机相邻两位置的经、纬度值计算出收割机前进距离,将此测算出的前进距离与收割机割幅相乘即可得收割机在这两个测算位置间的收割面积。本发明利用GPS信号来实时且精确的统计农业收获机械作业面积的方法。该方法简便有效,且无需对现有收获机械做任何改动,就可在收割机工作时对收割机进行实时计亩。

基于GPS技术的压实度实时检测系统.docx
基于GPS技术的压实度实时检测系统基于GPS技术的压实度实时检测系统摘要:随着城市建设的不断推进,土地压实度的检测和监测变得越来越重要。传统的检测方法依赖于人工观测和经验判断,效率低下且容易引发人为错误。为了解决这一问题,本文提出了一种基于GPS技术的压实度实时检测系统。该系统使用GPS定位技术来定位和跟踪压实设备,通过实时监测的方式准确地测量土地压实度。实验结果表明,该系统具有较高的定位精度和检测准确度,能够满足实时监测要求。关键词:GPS技术;压实度检测;实时监测1.引言城市建设过程中,土地的压实度是
基于GPS的高程拟合方法研究.pptx
汇报人:CONTENTSPARTONE概述GPS高程测量原理GPS高程测量精度PARTTWO概述线性回归分析法多项式拟合法支持向量机回归法PARTTHREE概述精度评估方法精度评估结果PARTFOUR概述高程拟合模型在工程中的应用高程拟合模型在其他领域的应用PARTFIVE概述高程拟合方法研究发展趋势高程拟合方法研究未来展望汇报人:

基于步行GPS轨迹的路网提取方法.docx
基于步行GPS轨迹的路网提取方法摘要本文针对基于步行GPS轨迹的路网提取问题,提出了一种基于聚类和道路拓扑关系的方法。首先,使用聚类算法对原始GPS轨迹进行聚类,形成若干个代表轨迹。然后,基于道路拓扑关系,对代表轨迹进行路径匹配,最终得到最优路径和路网。实验结果表明,本文提出的方法能够有效地提取出步行GPS轨迹中的路网信息。关键词:步行GPS轨迹;路网提取;聚类;道路拓扑关系AbstractThispaperproposesamethodofroadnetworkextractionbasedonpede
基于GPS的车辆调度方法和装置.pdf
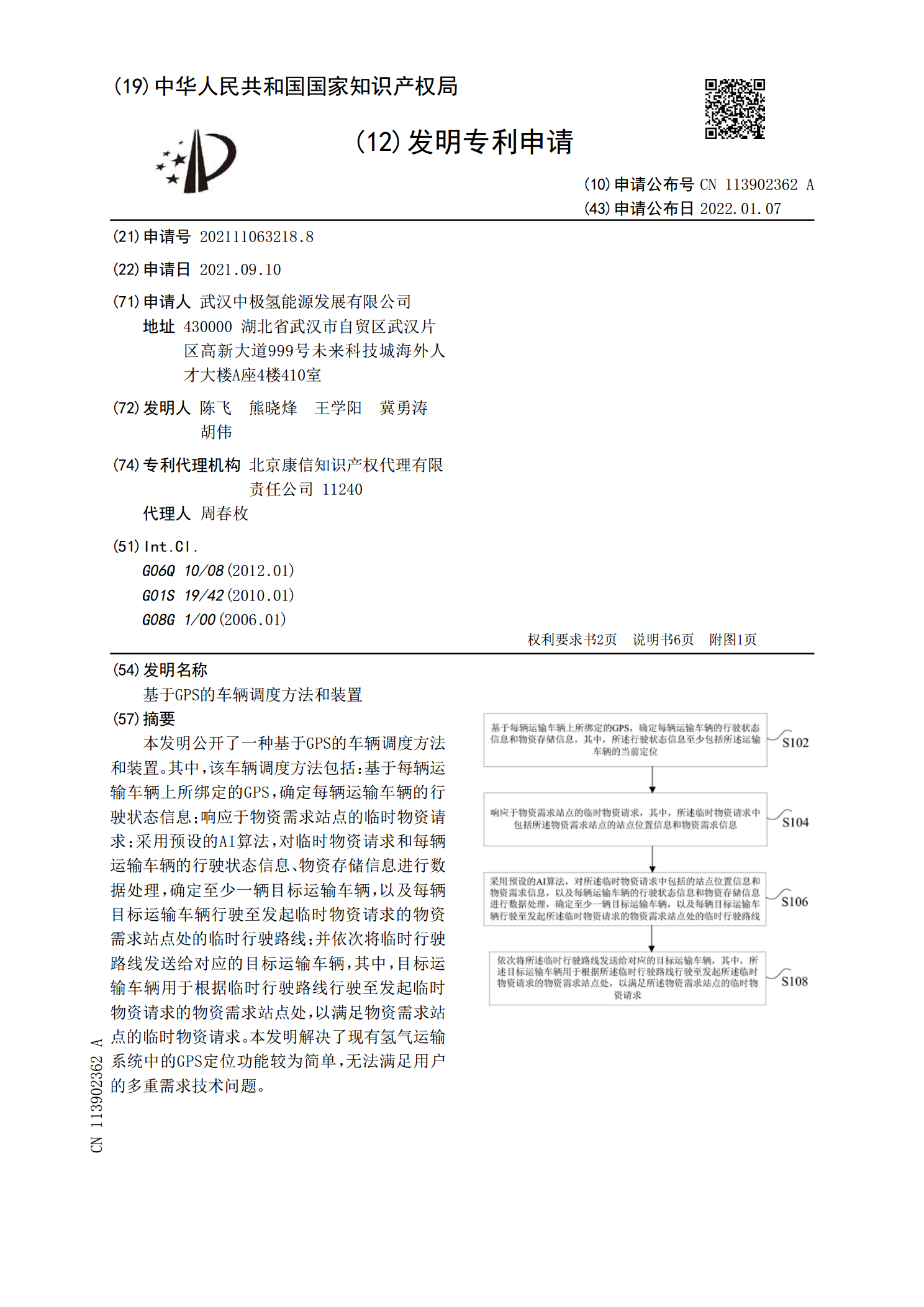
本发明公开了一种基于GPS的车辆调度方法和装置。其中,该车辆调度方法包括:基于每辆运输车辆上所绑定的GPS,确定每辆运输车辆的行驶状态信息;响应于物资需求站点的临时物资请求;采用预设的AI算法,对临时物资请求和每辆运输车辆的行驶状态信息、物资存储信息进行数据处理,确定至少一辆目标运输车辆,以及每辆目标运输车辆行驶至发起临时物资请求的物资需求站点处的临时行驶路线;并依次将临时行驶路线发送给对应的目标运输车辆,其中,目标运输车辆用于根据临时行驶路线行驶至发起临时物资请求的物资需求站点处,以满足物资需求站点的临