
一种收割机器人机械手动作控制装置的控制方法.pdf

一吃****天材


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种收割机器人机械手动作控制装置的控制方法.pdf
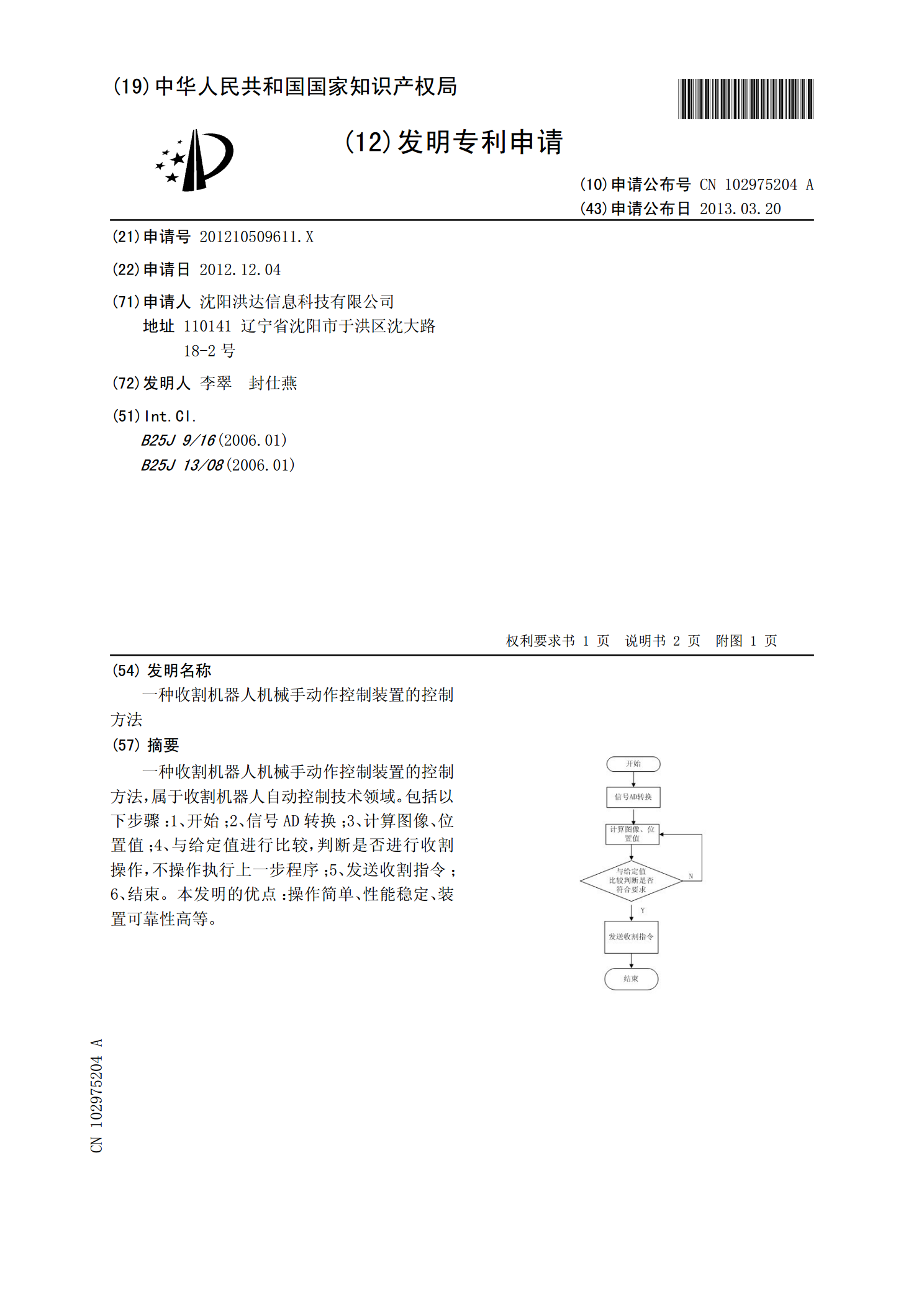
一种收割机器人机械手动作控制装置的控制方法,属于收割机器人自动控制技术领域。包括以下步骤:1、开始;2、信号AD转换;3、计算图像、位置值;4、与给定值进行比较,判断是否进行收割操作,不操作执行上一步程序;5、发送收割指令;6、结束。本发明的优点:操作简单、性能稳定、装置可靠性高等。

收割机器人机械手动作控制装置.pdf
一种收割机器人机械手动作控制装置,属于收割机器人自动控制技术领域。包括微处理器、位置检测单元、位置反馈单元、位置传感器、对象识别单元、对象反馈单元、图像传感器、操作单元和操作指示灯。本发明的优点:操作简单、性能稳定、装置可靠性高等。

一种机器人动作回归控制方法、装置、机器人和存储介质.pdf
本申请公开了一种机器人动作回归控制方法、装置、机器人和存储介质,其中,所述方法包括:确定满足触发条件,获取所述机器人的控制参数组序列(P

一种联合收割机控制装置及控制方法.pdf
一种联合收割机控制装置,其包括有负荷反馈控制装置、提供动力的发动机、第一传动装置、行走机构、第二传动装置和传输带,所述发动机的输出轴通过第一传动装置和行走机构的驱动轮轴连接,其特征在于:所述行走机构的驱动轮轴通过第二传动装置和传输带主动轮轴连接;所述负荷反馈控制装置包括模糊控制模块、PID控制模块、检测脱粒滚筒转速的第一检测元件以及检测脱粒滚筒负荷转矩的第二检测元件,模糊控制模块通过第一检测元件构成滚筒转速控制回路,PID控制模块通过第二检测元件构成滚筒负荷转矩控制回路。本发明联合收割机在传统联合收割机的
一种机器人控制方法及装置.pdf
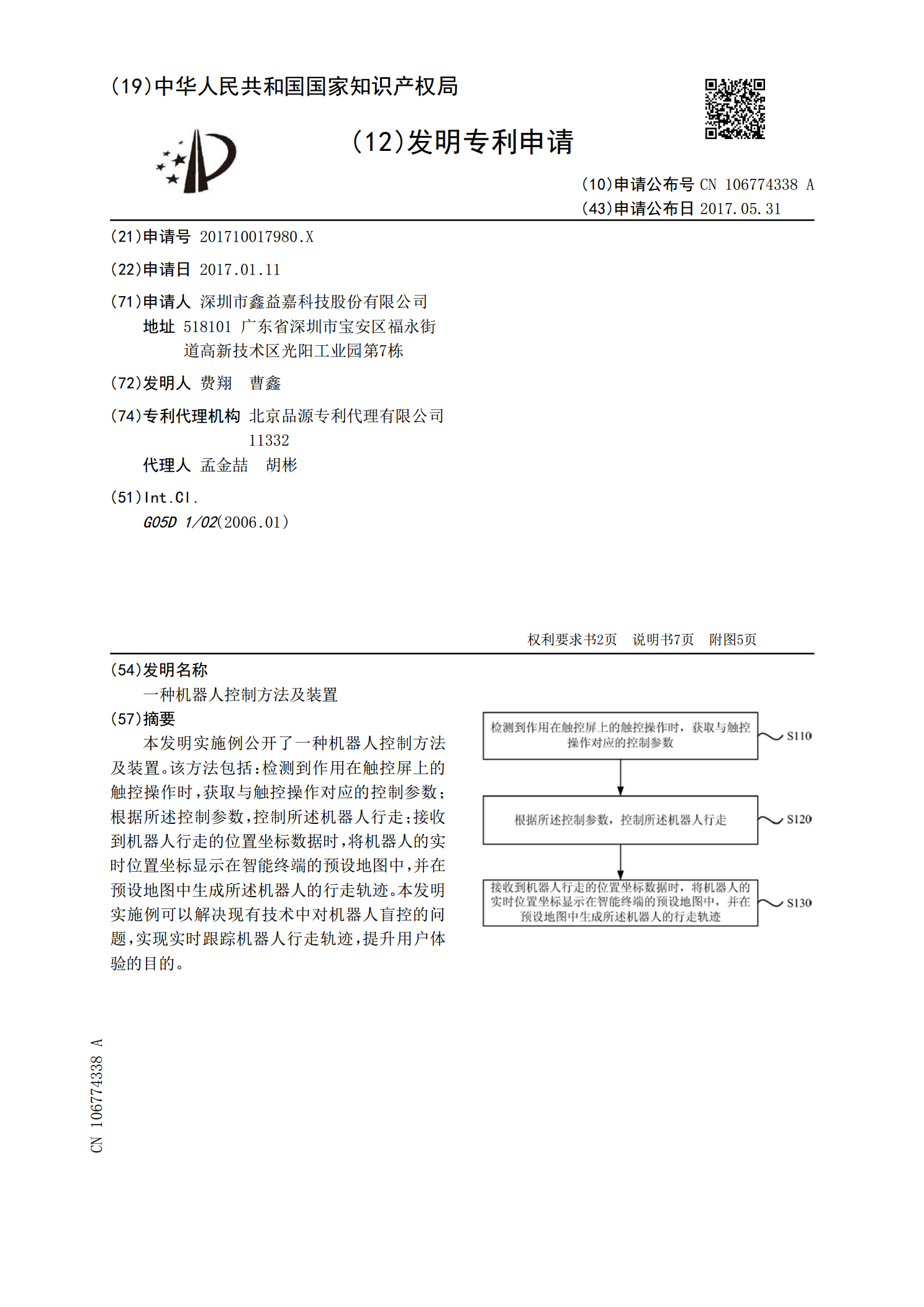
本发明实施例公开了一种机器人控制方法及装置。该方法包括:检测到作用在触控屏上的触控操作时,获取与触控操作对应的控制参数;根据所述控制参数,控制所述机器人行走;接收到机器人行走的位置坐标数据时,将机器人的实时位置坐标显示在智能终端的预设地图中,并在预设地图中生成所述机器人的行走轨迹。本发明实施例可以解决现有技术中对机器人盲控的问题,实现实时跟踪机器人行走轨迹,提升用户体验的目的。