
一种基于ROS无人驾驶联合收割机激光导航系统.pdf

甲申****66


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于ROS无人驾驶联合收割机激光导航系统.pdf
本发明公开一种基于ROS无人驾驶联合收割机激光导航系统,主要包括激光传感器、托盘、IMU惯性测量单元、步进电机、PC机和自动转向装置。所述托盘安装在步进电机的输出轴上,所述激光传感器固定在托盘上、安装于联合收割机前沿,并通过网线接口与PC机相连,所述IMU惯性测量单元安装在托盘上、激光传感器后端,并通过RS232串口与PC机相连,所述PC机放在联合收割机驾驶室内,所述自动转向装置包括ARM控制器、电机驱动器及方向盘控制电机。本发明基于ROS构建无人驾驶联合收割机激光导航系统,将激光传感器装于车前沿,由步进

一种无人驾驶联合收割机激光导航系统.pdf
本发明公开一种无人驾驶联合收割机激光导航系统,主要包括GPS、IMU惯性传感器、激光传感器、自动转向装置和PC机。所述GPS1安装在联合收割机顶部,并通过RS232接口与PC机5相连,所述IMU惯性传感器2安装在联合收割机顶部,并通过USB接口与PC机5相连,所述激光传感器3倾斜安装在联合收割机前沿,并通过网线接口与PC机5相连,所述PC机5放在联合收割机驾驶室内,所述自动转向装置4包括电机驱动器及方向盘控制电机,并通过CAN总线与PC机5相连。本发明通过改进基于小麦收割线激光识别技术的无人驾驶联合收割机
无人驾驶联合收割机的激光导航系统.pdf
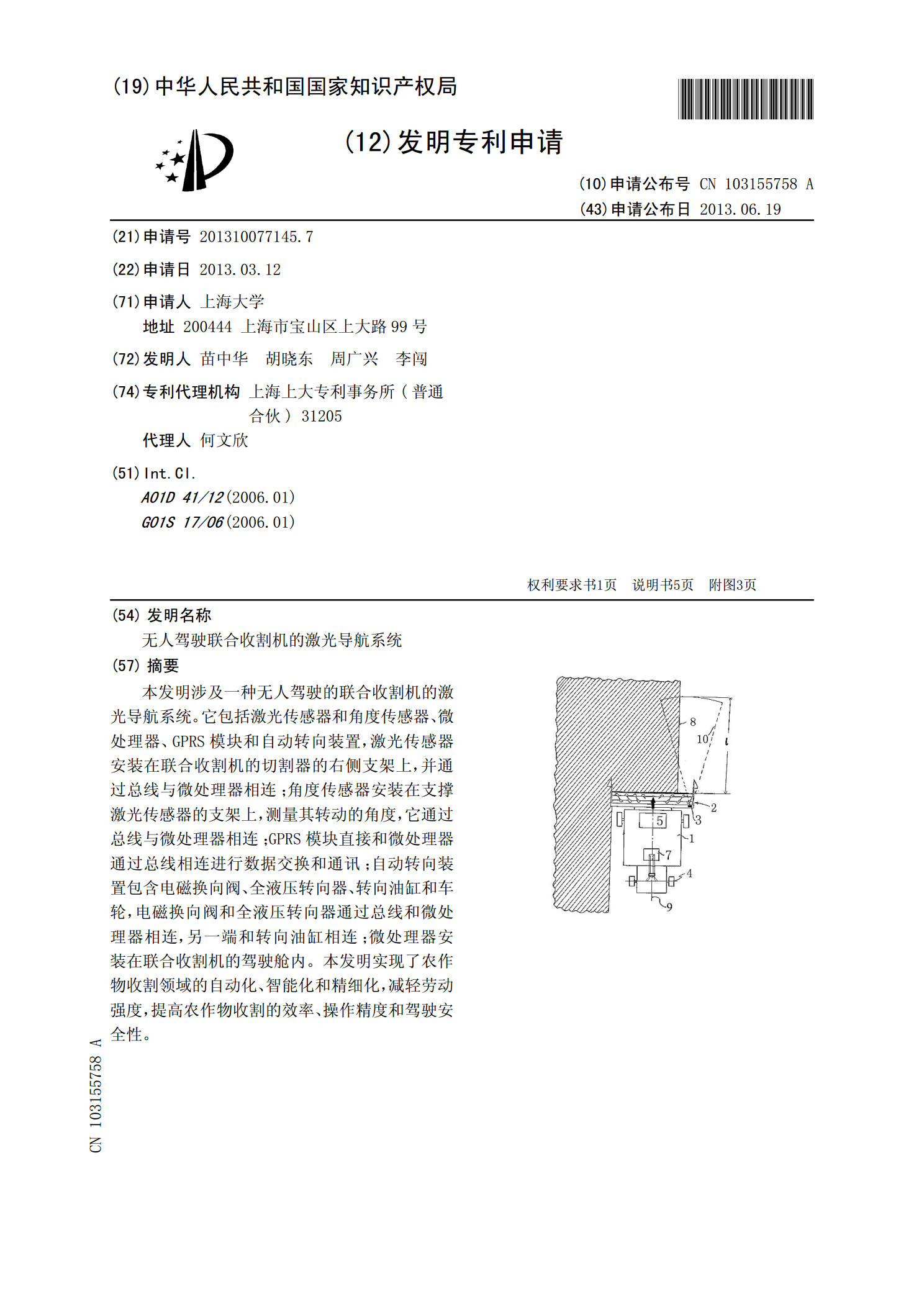
本发明涉及一种无人驾驶的联合收割机的激光导航系统。它包括激光传感器和角度传感器、微处理器、GPRS模块和自动转向装置,激光传感器安装在联合收割机的切割器的右侧支架上,并通过总线与微处理器相连;角度传感器安装在支撑激光传感器的支架上,测量其转动的角度,它通过总线与微处理器相连;GPRS模块直接和微处理器通过总线相连进行数据交换和通讯;自动转向装置包含电磁换向阀、全液压转向器、转向油缸和车轮,电磁换向阀和全液压转向器通过总线和微处理器相连,另一端和转向油缸相连;微处理器安装在联合收割机的驾驶舱内。本发明实现了
一种无人驾驶联合收割机视觉导航系统.pdf
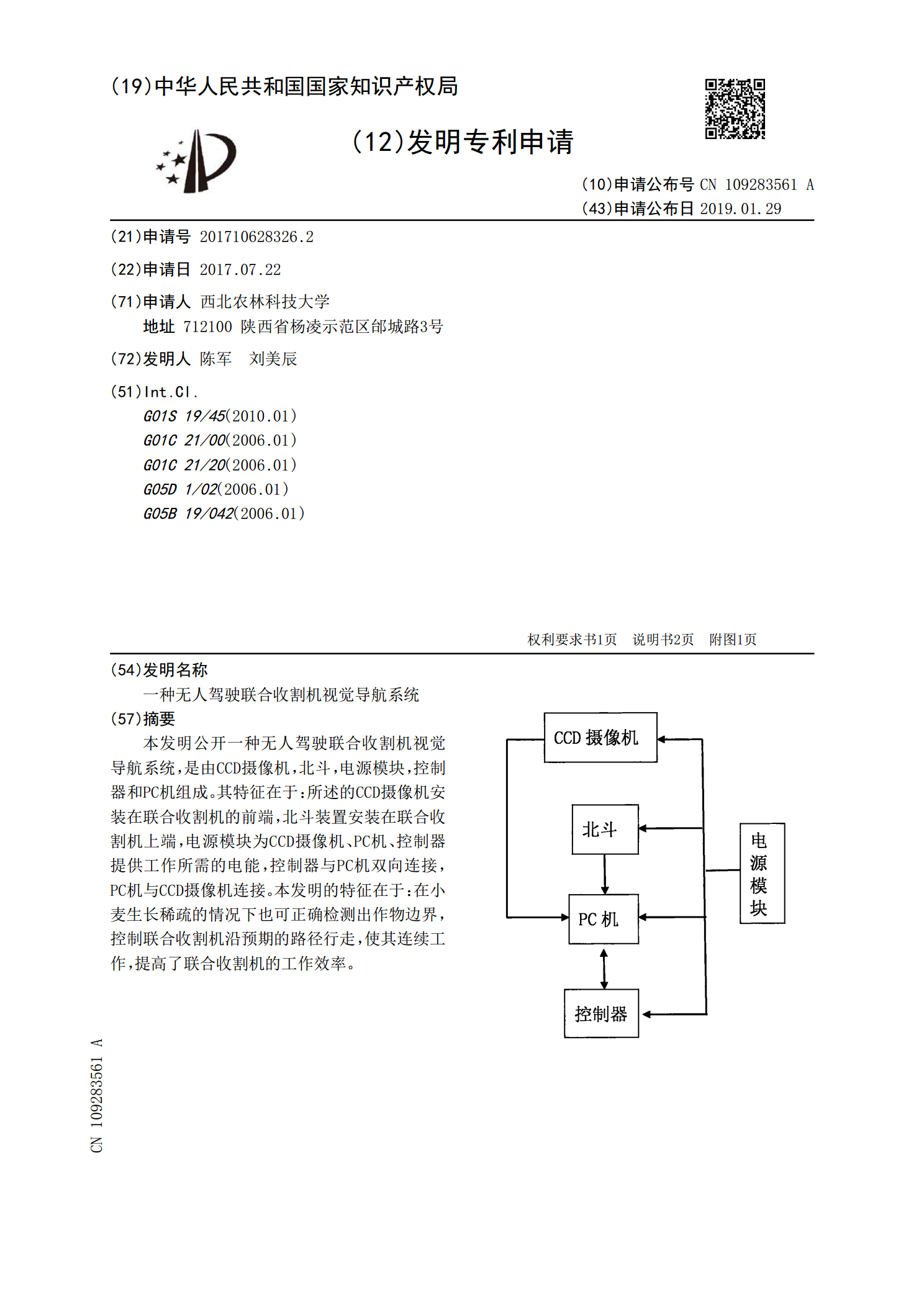
本发明公开一种无人驾驶联合收割机视觉导航系统,是由CCD摄像机,北斗,电源模块,控制器和PC机组成。其特征在于:所述的CCD摄像机安装在联合收割机的前端,北斗装置安装在联合收割机上端,电源模块为CCD摄像机、PC机、控制器提供工作所需的电能,控制器与PC机双向连接,PC机与CCD摄像机连接。本发明的特征在于:在小麦生长稀疏的情况下也可正确检测出作物边界,控制联合收割机沿预期的路径行走,使其连续工作,提高了联合收割机的工作效率。

一种基于ROS的四轮车导航系统.pdf
本发明公开了一种基于ROS的四轮车导航系统,包括云服务器和四轮车。其中云服务器包括环境地图构建模块、路径规划模块、里程信息估算模块、车辆定位模块、手动控制模块,四轮车搭载小型计算设备、运动控制模块、惯性测量模块、环境感知设备;环境感知设备和惯性测量模块采集环境信息和四轮车运动姿态信息,将其发送至云服务器;云服务器根据其四轮车运动模型计算出里程信息,估算坐标,并由路径规划模块输出形式路径和控制指令。本发明系统具有部署成本低、扩展性好、支持高速行驶等特点。