
轨道式扒矿输送机.pdf

小新****ou

1/8
2/8
3/8

4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轨道式扒矿输送机.pdf
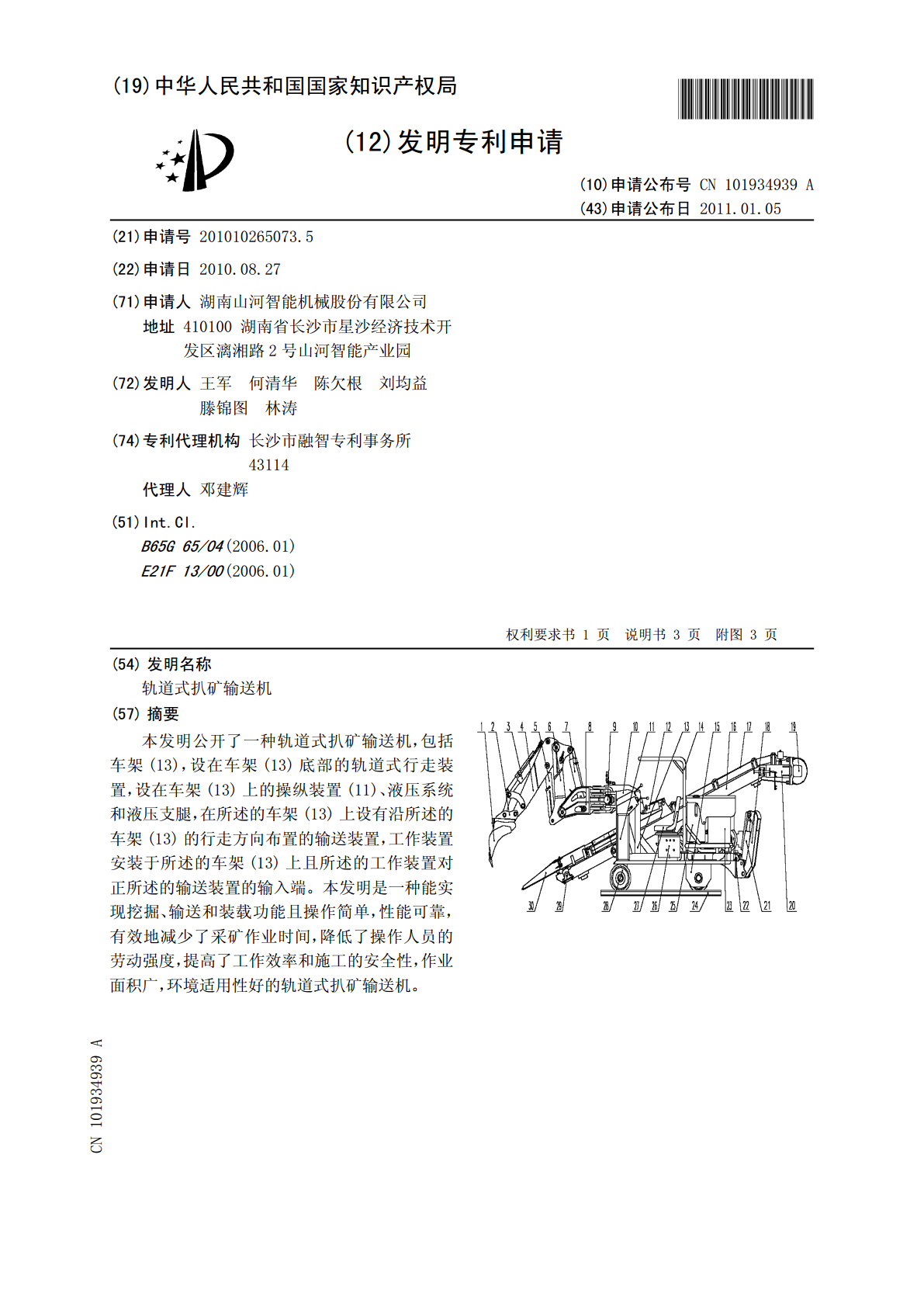
本发明公开了一种轨道式扒矿输送机,包括车架(13),设在车架(13)底部的轨道式行走装置,设在车架(13)上的操纵装置(11)、液压系统和液压支腿,在所述的车架(13)上设有沿所述的车架(13)的行走方向布置的输送装置,工作装置安装于所述的车架(13)上且所述的工作装置对正所述的输送装置的输入端。本发明是一种能实现挖掘、输送和装载功能且操作简单,性能可靠,有效地减少了采矿作业时间,降低了操作人员的劳动强度,提高了工作效率和施工的安全性,作业面积广,环境适用性好的轨道式扒矿输送机。

油锯式轨道扒渣机.pdf
一种油锯式轨道扒渣机,结构由汽油机、弯管、软轴、涡轮室、锯齿链、导板、镐头和把手组成。在传动轴的底座上连接弯管,弯管和涡轮室相连成一体。在涡轮室的输出轴上设有链轮及支架,在链轮上设有锯齿链,在锯齿链内设有导板,导板固定在支架上。在锯齿链上设有若干个镐头,在涡轮室和汽油机之间设有把手及支撑,在弯管的下边设有底腿,底腿能够使机器站立在地面上。
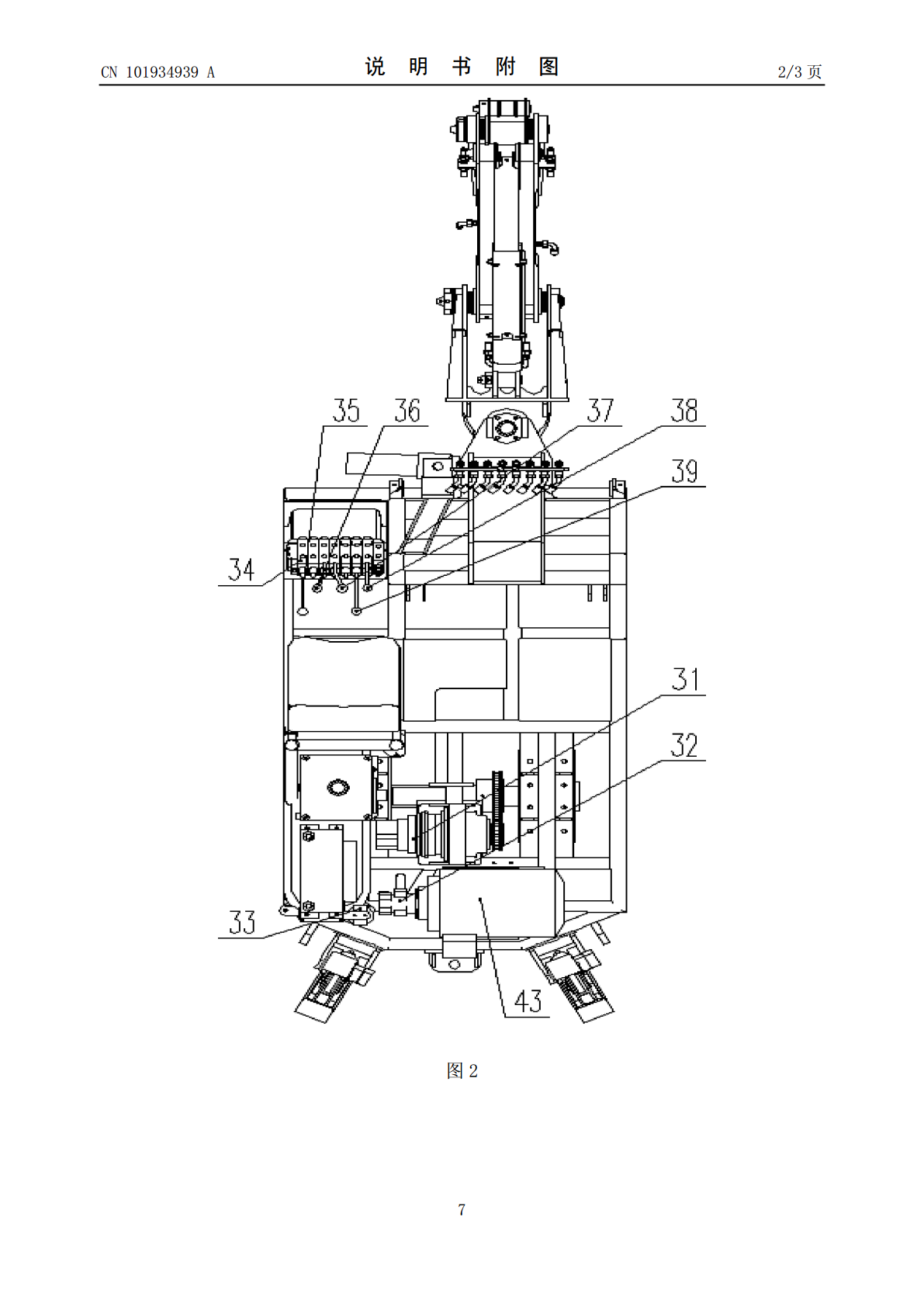
管状式轨道带式输送机.pdf
本发明涉及一种管状式轨道带式输送机,包括支架、上轨道、下轨道、夹带小车、托带小车、输送带、钢丝绳、托辊组、过渡支架,夹带小车包括U形架、导向轮、三角板,托带小车包括弧形支撑架和车轮,所述输送带上部由夹带小车夹持,下部由托带小车承载而形成管状;所述上轨道和下轨道均通过压紧板安装在支架上,夹带小车在上轨道上运行,托带小车在下轨道上运行,两者相对独立;所述夹带小车通过上轨道在机头或机尾与输送带进行分离或接合,托带小车通过下轨道在机头或机尾与输送带进行分离或接合。本发明用夹带小车、托带小车代替了托辊结构实现输送带

油锯式轨道扒渣机的制造方法.pdf
一种油锯式轨道扒渣机的制造方法,结构由汽油机、弯管、软轴、涡轮室、锯齿链、导板、镐头和把手组成。在传动轴的底座上连接弯管,弯管和涡轮室相连成一体。在涡轮室的输出轴上设有链轮及支架,在链轮上设有锯齿链,在锯齿链内设有导板,导板固定在支架上。在锯齿链上设有若干个镐头,在涡轮室和汽油机之间设有把手及支撑,在弯管的下边设有底腿,底腿能够使机器站立在地面上。

全自动摇控自走式扒粮输送机.pdf
本发明涉及一种全自动摇控自走式扒粮输送机,它主要由:滚轮防护架1、扒粮机螺旋滚轮2、驱动电机3、驱动电机防护罩4、扒粮机防护罩5、输送带6、输送架7、电控箱8、升降系统9、输送机防护罩10、伸缩输送带架11、扒粮斗12、转向系统13、升降支架14、行走系统15、行走驱动轮16、遥控器17构成。其特征在于:通过遥控器或手动操作控制驱动电机的启动与停止,由驱动电机带动各传动部件,各传动部件带动螺旋滚轮和输送带进行扒粮和输送粮的工作,再通过遥控器或手动操作控制驱动电机的启动与停止,来控制全自动摇控扒粮输送机的升