
抱闸机构、机器人关节的抱闸机构、方法及机器人关节.pdf

努力****元恺

1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
抱闸机构、机器人关节的抱闸机构、方法及机器人关节.pdf
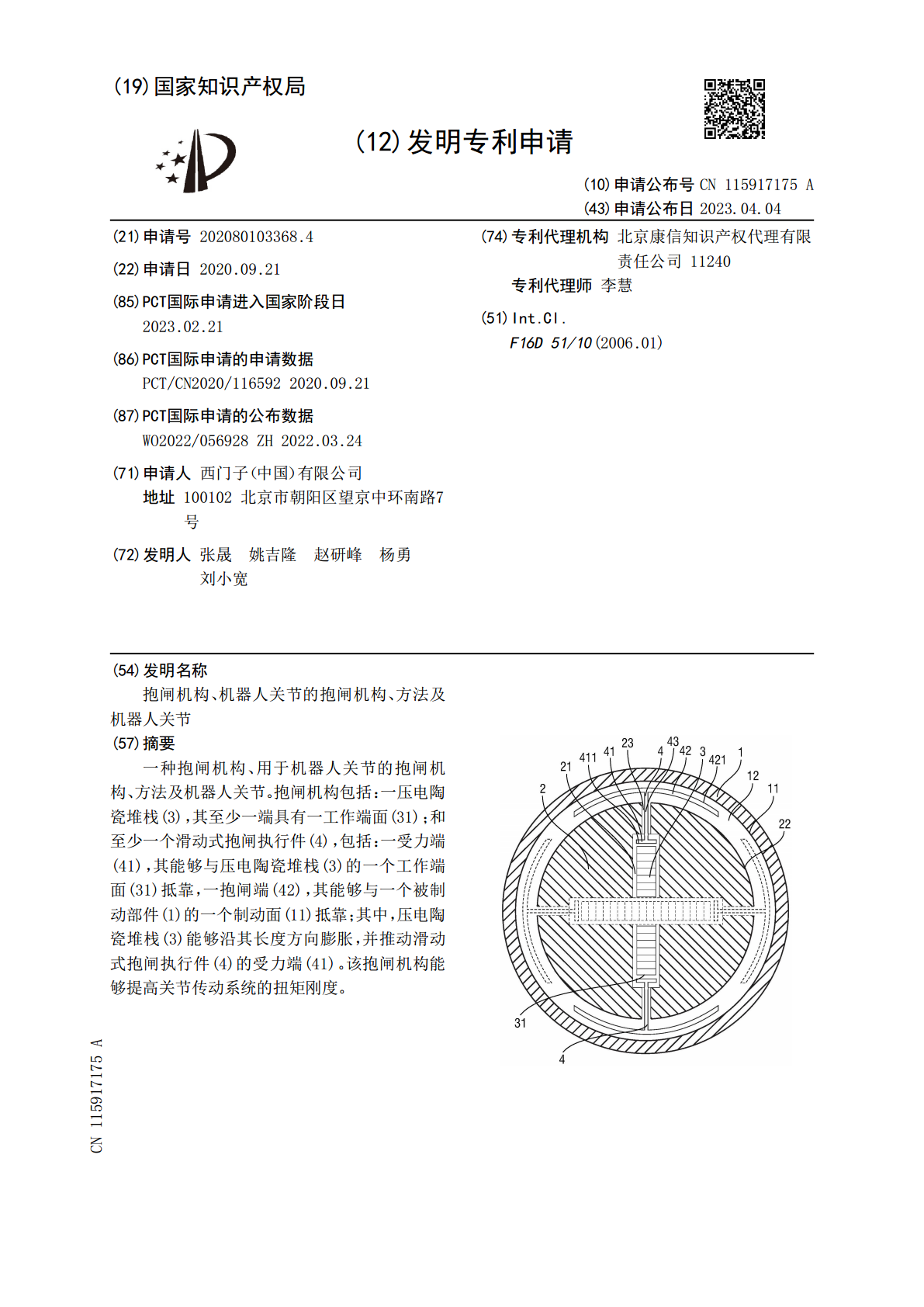
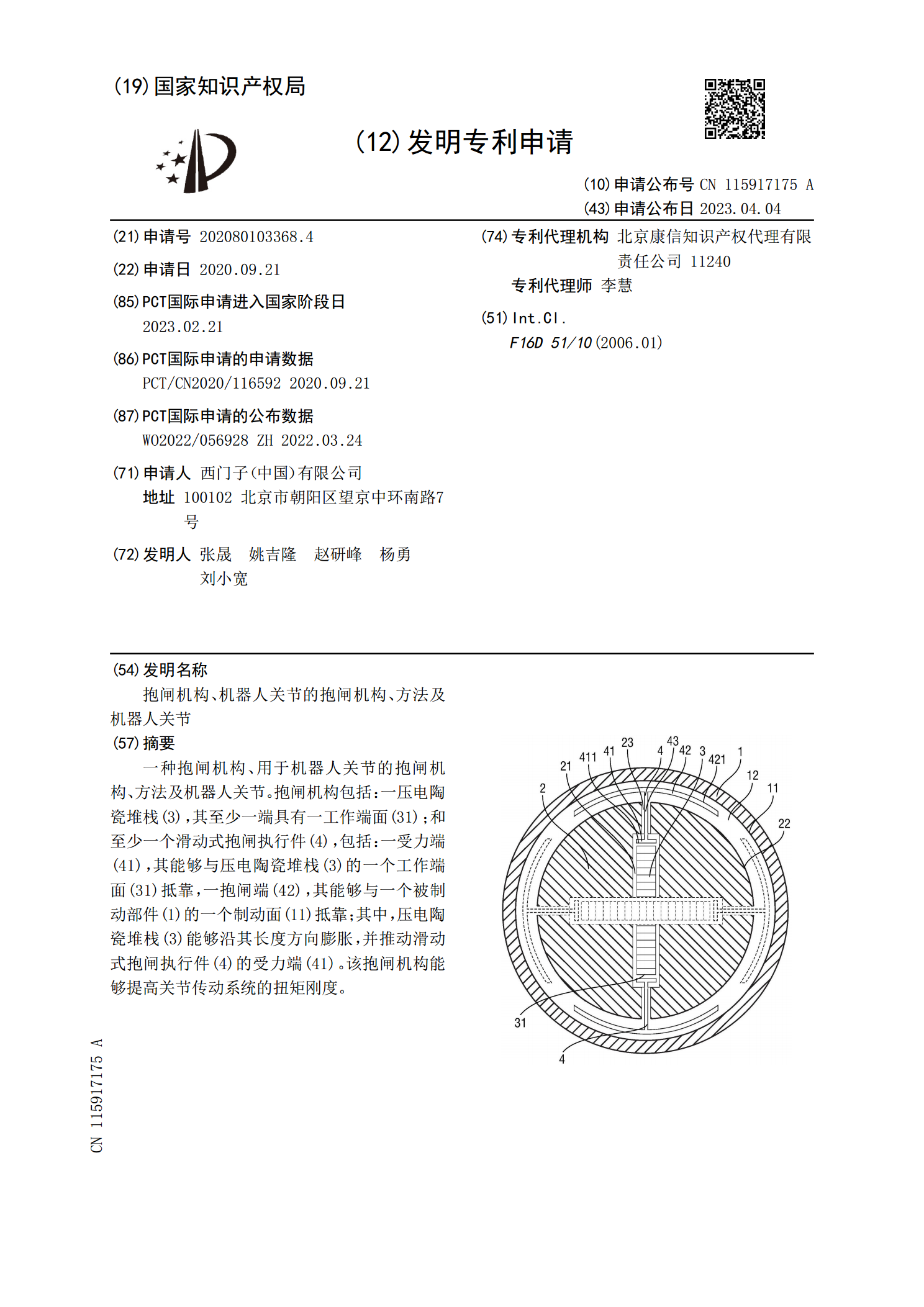
一种抱闸机构、用于机器人关节的抱闸机构、方法及机器人关节。抱闸机构包括:一压电陶瓷堆栈(3),其至少一端具有一工作端面(31);和至少一个滑动式抱闸执行件(4),包括:一受力端(41),其能够与压电陶瓷堆栈(3)的一个工作端面(31)抵靠,一抱闸端(42),其能够与一个被制动部件(1)的一个制动面(11)抵靠;其中,压电陶瓷堆栈(3)能够沿其长度方向膨胀,并推动滑动式抱闸执行件(4)的受力端(41)。该抱闸机构能够提高关节传动系统的扭矩刚度。

关节抱闸机构及机器人关节.pdf
本发明提供一种关节抱闸机构及机器人关节,关节抱闸机构包括:离合圈、摩擦组件和插销组件,所述离合圈包括内圈和外圈,内圈和外圈之间分布有开槽和滚体,所述滚体能够基于插销组件的作用沿所述开槽由第一位置运动至第二位置,以使得内圈和外圈实现接合和分离的切换;当所述内圈和外圈分离时,内圈和外圈能够相对旋转;当所述内圈和外圈接合时,内圈和外圈的相对旋转被限制,所述摩擦组件轴向压紧离合圈以实现刹车减速。本申请具体实施例的抱闸机构仅需较小的驱动力驱动插销组件运动,抱闸机构的体积较小、结构紧凑。
关节机器人定位机构.pdf
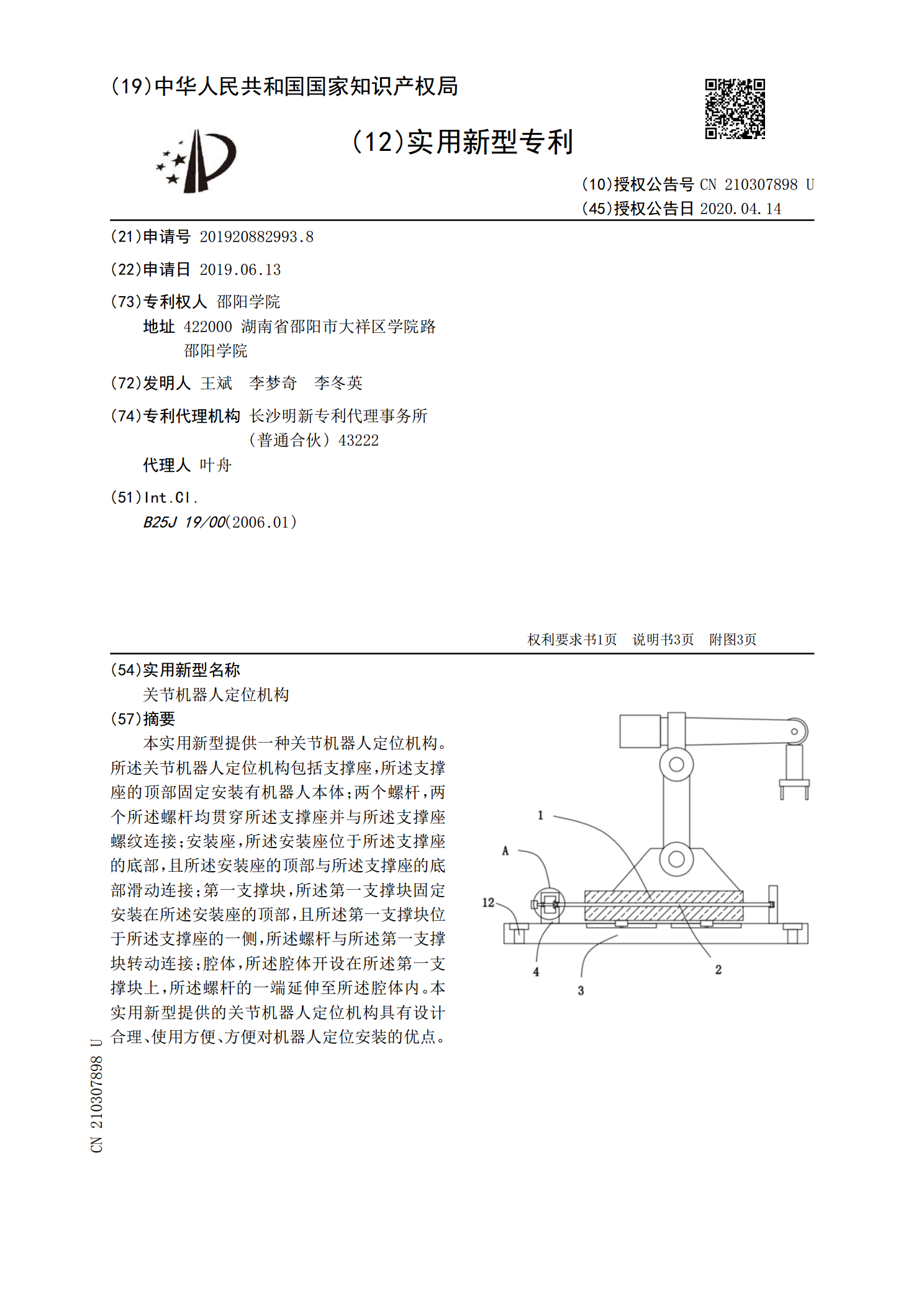
本实用新型提供一种关节机器人定位机构。所述关节机器人定位机构包括支撑座,所述支撑座的顶部固定安装有机器人本体;两个螺杆,两个所述螺杆均贯穿所述支撑座并与所述支撑座螺纹连接;安装座,所述安装座位于所述支撑座的底部,且所述安装座的顶部与所述支撑座的底部滑动连接;第一支撑块,所述第一支撑块固定安装在所述安装座的顶部,且所述第一支撑块位于所述支撑座的一侧,所述螺杆与所述第一支撑块转动连接;腔体,所述腔体开设在所述第一支撑块上,所述螺杆的一端延伸至所述腔体内。本实用新型提供的关节机器人定位机构具有设计合理、使用方便

关节机构和机器人.pdf
本发明提供关节机构和机器人,能够更可靠地防止在内部空间填充的润滑材料的漏出。具备齿轮箱,在所述齿轮箱中收纳有将来自驱动源的动力传递至被驱动体的齿轮组、和对齿轮组进行润滑的润滑材料。齿轮箱包括被预先减压而成的负压空间。并且,齿轮箱具备对内部进行减压的减压装置。
类人机器人的关节机构.pdf
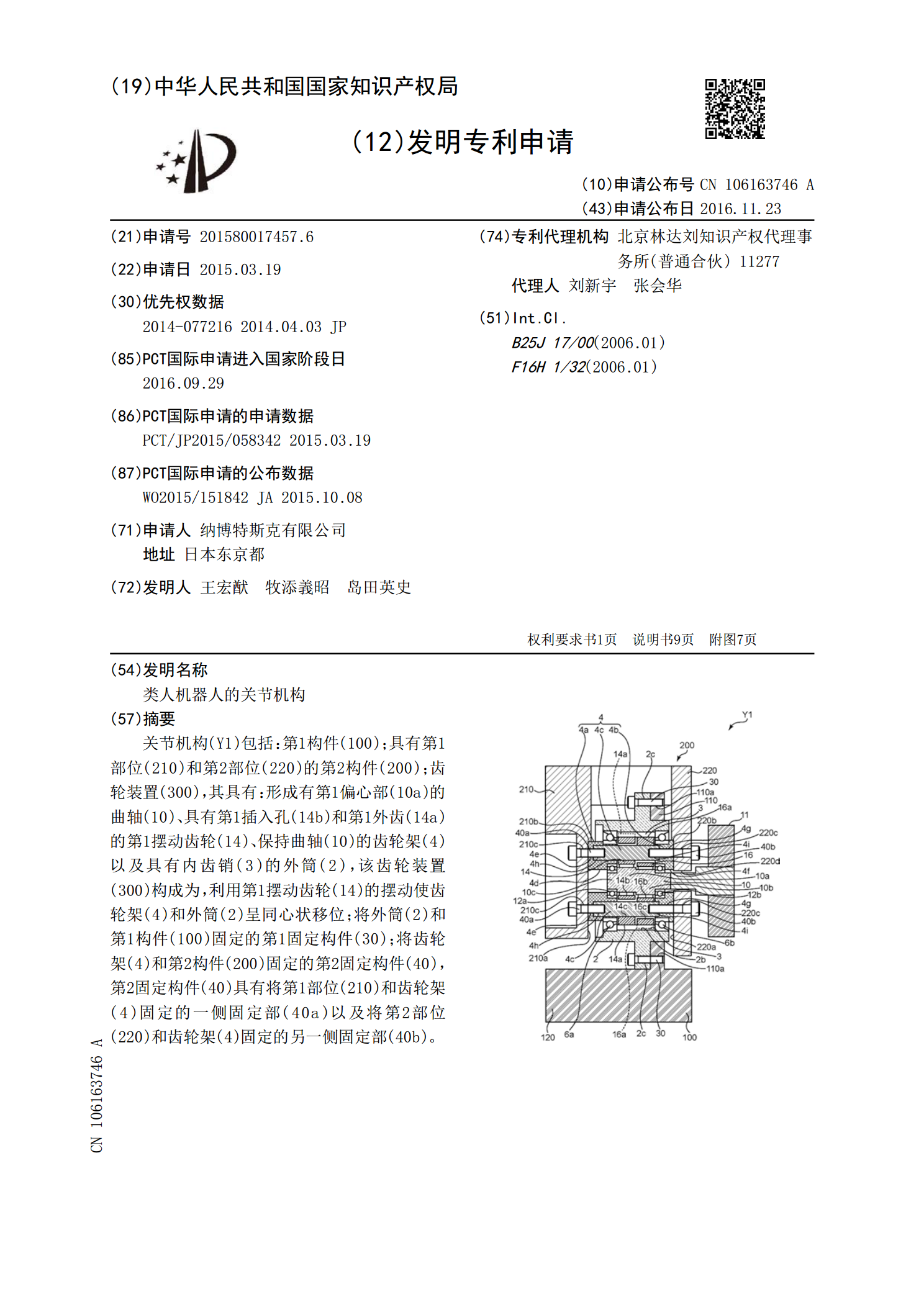
关节机构(Y1)包括:第1构件(100);具有第1部位(210)和第2部位(220)的第2构件(200);齿轮装置(300),其具有:形成有第1偏心部(10a)的曲轴(10)、具有第1插入孔(14b)和第1外齿(14a)的第1摆动齿轮(14)、保持曲轴(10)的齿轮架(4)以及具有内齿销(3)的外筒(2),该齿轮装置(300)构成为,利用第1摆动齿轮(14)的摆动使齿轮架(4)和外筒(2)呈同心状移位;将外筒(2)和第1构件(100)固定的第1固定构件(30);将齿轮架(4)和第2构件(200)固定的第2