
一种牲畜智能体尺测定方法、系统及装置.pdf

小琛****82


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种牲畜智能体尺测定方法、系统及装置.pdf
本发明公开了一种牲畜智能体尺测定方法、系统及装置,涉及牲畜体尺测定领域,方法包括:通过双目相机采集待测牲畜不同角度的多组图像;之后确定所述待测牲畜的立体模型的初始三维点集,并通过RANSAC算法的极线约束对所述初始三维点集进行特征点匹配,通过SIFT算法对所述初始三维点集进行关键点提取,根据所述特征点匹配结果和关键点提取结果构建所述待测牲畜的三维模型;最后根据所述待测牲畜的三维模型即可确定所述待测牲畜的体尺数据。本发明通过双目视觉体尺测定方法可以准确地获得牲畜的体尺数据。
一种奶牛体尺测定系统.pdf
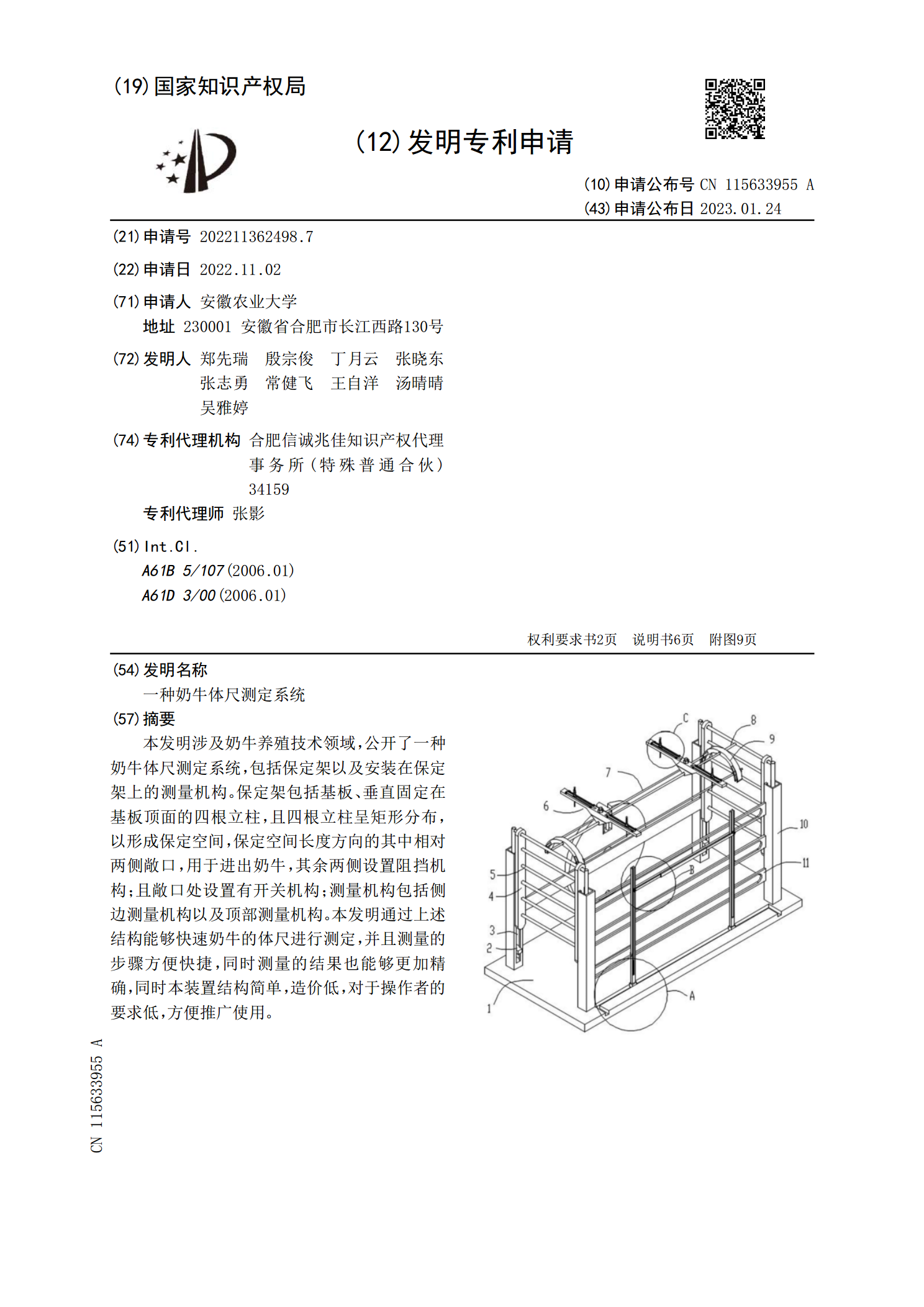
本发明涉及奶牛养殖技术领域,公开了一种奶牛体尺测定系统,包括保定架以及安装在保定架上的测量机构。保定架包括基板、垂直固定在基板顶面的四根立柱,且四根立柱呈矩形分布,以形成保定空间,保定空间长度方向的其中相对两侧敞口,用于进出奶牛,其余两侧设置阻挡机构;且敞口处设置有开关机构;测量机构包括侧边测量机构以及顶部测量机构。本发明通过上述结构能够快速奶牛的体尺进行测定,并且测量的步骤方便快捷,同时测量的结果也能够更加精确,同时本装置结构简单,造价低,对于操作者的要求低,方便推广使用。
基于机器视觉的生猪体尺测定方法及装置.pdf
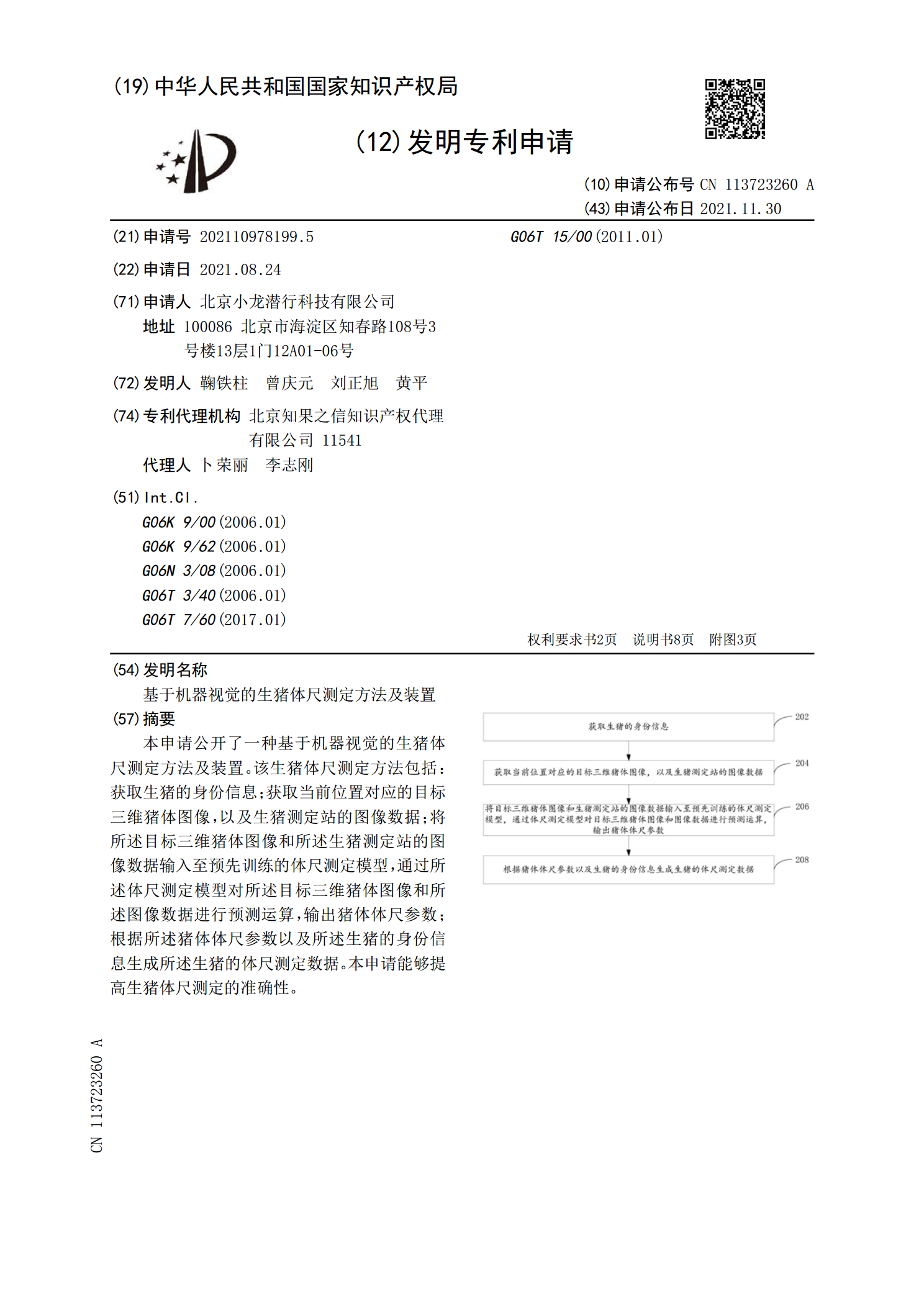
本申请公开了一种基于机器视觉的生猪体尺测定方法及装置。该生猪体尺测定方法包括:获取生猪的身份信息;获取当前位置对应的目标三维猪体图像,以及生猪测定站的图像数据;将所述目标三维猪体图像和所述生猪测定站的图像数据输入至预先训练的体尺测定模型,通过所述体尺测定模型对所述目标三维猪体图像和所述图像数据进行预测运算,输出猪体体尺参数;根据所述猪体体尺参数以及所述生猪的身份信息生成所述生猪的体尺测定数据。本申请能够提高生猪体尺测定的准确性。

一种牲畜的智能甄选方法及系统.pdf
本发明提供了一种牲畜的智能甄选系统,包括:获取模块、生成模块、判断模块、排序模块。所述获取模块,用于获取用户输入的甄选的关键词。所述生成模块,用于根据所述关键词,生成相应的甄选匹配结果。所述判断模块,用于判断所述甄选匹配结果是否满足用户需求。所述排序模块,用于当所述判断模块判断甄选匹配结果满足用户需求,则通过预设的方式,对甄选匹配结果进行排序。本发明还提供了一种牲畜的智能甄选方法,与现有技术相比,本发明能够根据监测到的牲畜的体征数据及运动数据,为用户提供智能化甄选牲畜的方法,实现进一步方便用户生活的目的。

一种育种用种猪体尺测定系统.pdf
本发明公开了一种育种用种猪体尺测定系统,涉及种猪测量装置技术领域,针对现有的测定效率低的问题,现提出如下方案,其包括基座,其上侧固定连接有称重器;束缚箱,其固定连接在称重器上,其两侧连接有激光测量;第一束缚机构,其滑动套接在束缚箱的底部;第二束缚机构,其滑动套接在束缚箱的两侧;支撑弧,其对称设置在束缚箱内,且其与束缚箱固定连接;第一气压缸,其一端与其中一个支撑弧转动连接,且其另一端与另一个支撑弧转动连接;稳定机构,其设置在束缚箱的一侧,本发明结构简单,使用方便,可以方便进行猪的保定,同时也方便后续的接触,