
一种农用喷药机器人.pdf

努力****亚捷


1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种农用喷药机器人.pdf
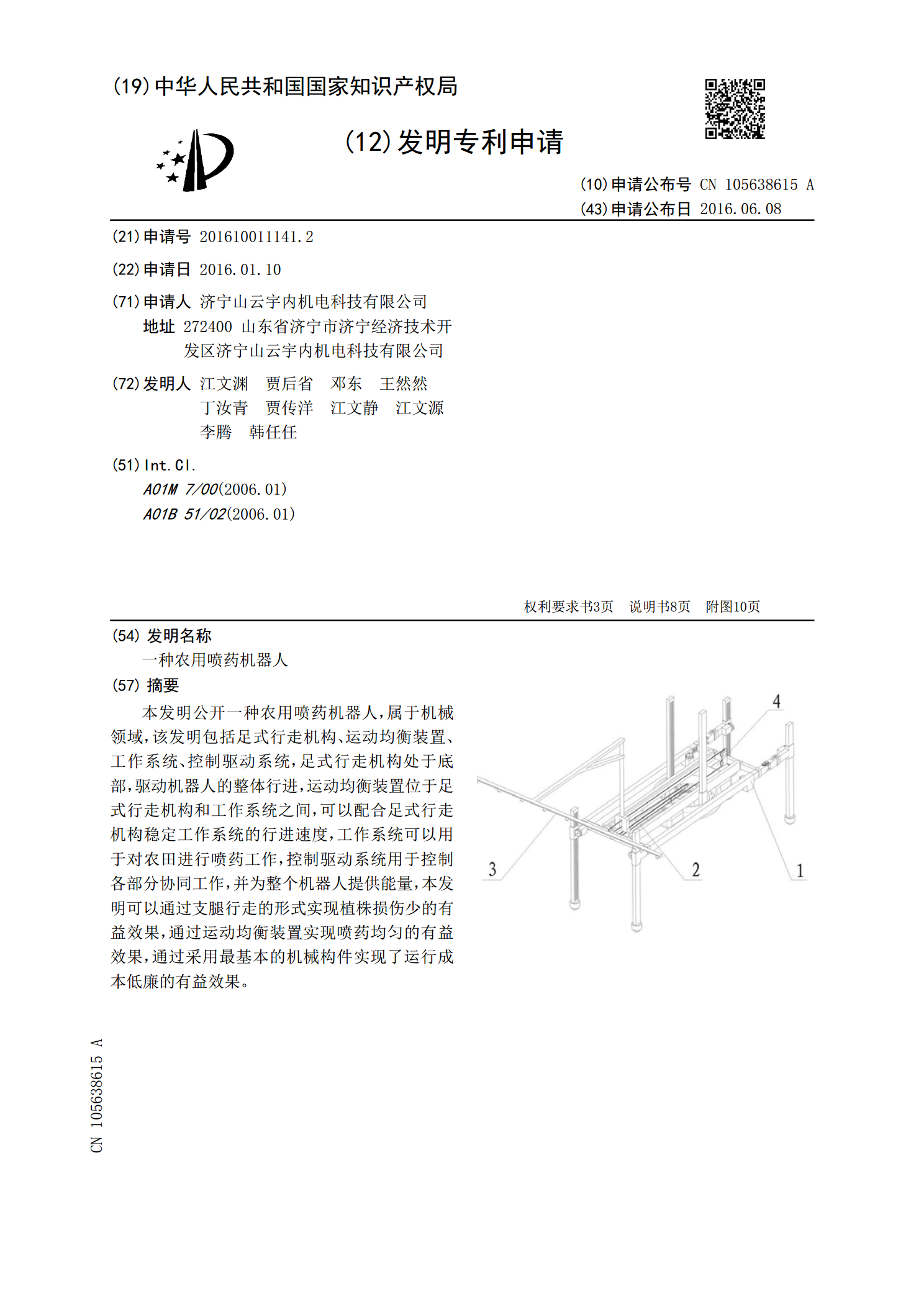
本发明公开一种农用喷药机器人,属于机械领域,该发明包括足式行走机构、运动均衡装置、工作系统、控制驱动系统,足式行走机构处于底部,驱动机器人的整体行进,运动均衡装置位于足式行走机构和工作系统之间,可以配合足式行走机构稳定工作系统的行进速度,工作系统可以用于对农田进行喷药工作,控制驱动系统用于控制各部分协同工作,并为整个机器人提供能量,本发明可以通过支腿行走的形式实现植株损伤少的有益效果,通过运动均衡装置实现喷药均匀的有益效果,通过采用最基本的机械构件实现了运行成本低廉的有益效果。

一种农用喷药设备.pdf
本发明具体涉及一种农用喷药设备,包括喷药装置、行走机构、基座和太阳能电池板,喷药装置固定在基座的上面顶部,行走机构安装在基座的底部,太阳能电池板安装在喷药装置的外壁,基座为中空结构,基座的内部安装有电源,电源与太阳能电池板电连接,行走机构包括双向电动推杆、推拉杆、连接套环、支撑杆和行走轮,双向电动推杆安装在基座的底部中央,且双向电动推杆与电源电连接,双向电动推杆的两端均垂直连接推拉杆的中点,两组推拉杆的两端均与连接套环活动连接,四组连接套环分别套接在支撑杆上,四组支撑杆的顶端均与基座的底部转动连接,四组支

一种农用喷药覆膜机.pdf
本发明提供了一种农用喷药覆膜机,包括工字型支架和对称设置在工字型支架左右两侧的调节支架,工字型支架包括中心支杆以及副支杆,调节支架包括调节支杆和滑杆,中心支杆上从前往后依次设有推土犁、喷药嘴、喷药泵和药箱,调节支杆的前后两端底部对称设有车轮架,调节支杆的底部从前往后依次设有开沟架、辅助压膜架和埋土架。本发明的有益效果在于:将喷药、开沟、覆膜、压膜和埋土操作集成一体,有效解决以往覆膜时费时费力的缺点,此外,整体结构简单,方便调节宽幅,能在不同大小田垄间作业,具有广泛的适用性。
一种喷药播种农用机械.pdf
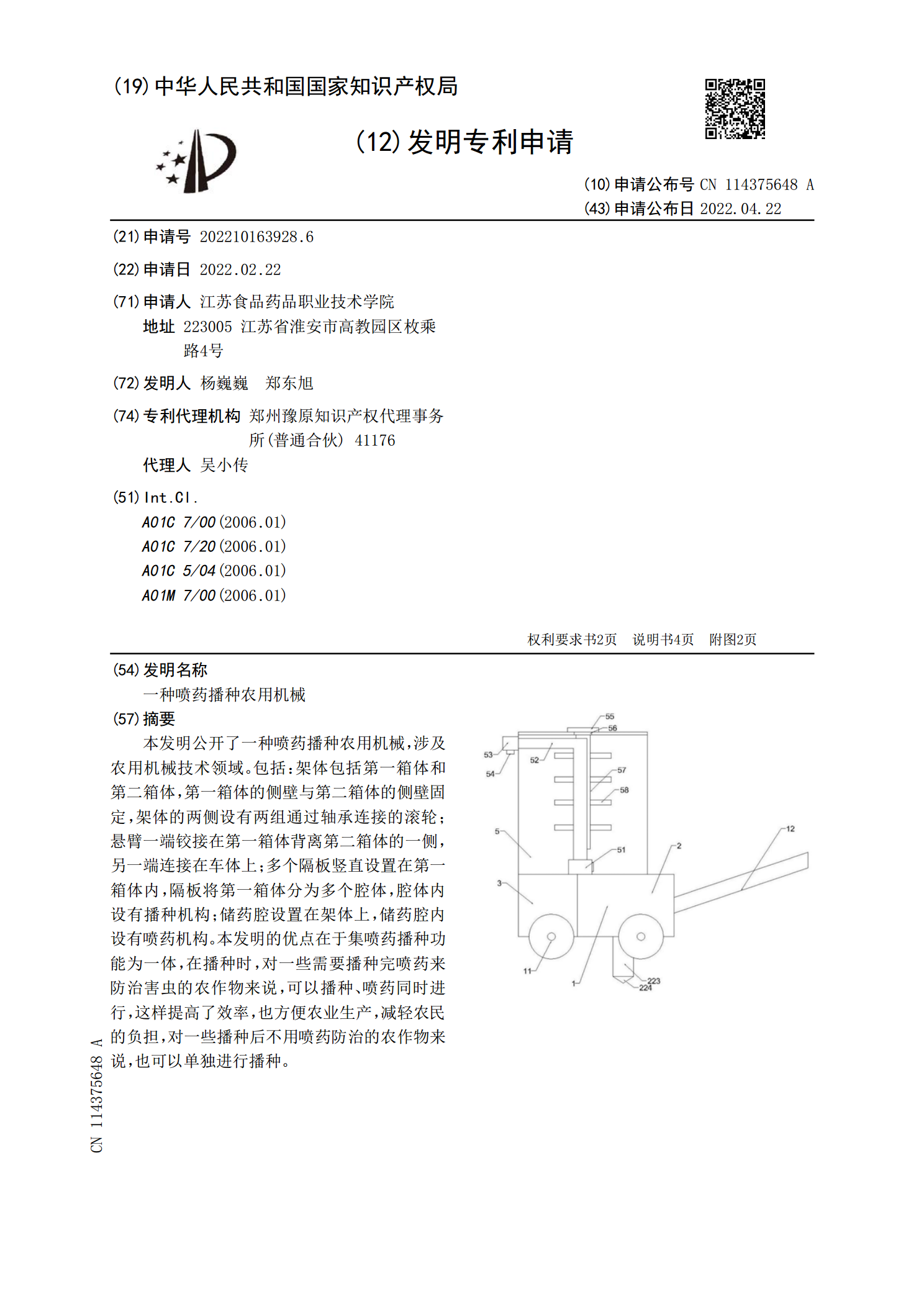
本发明公开了一种喷药播种农用机械,涉及农用机械技术领域。包括:架体包括第一箱体和第二箱体,第一箱体的侧壁与第二箱体的侧壁固定,架体的两侧设有两组通过轴承连接的滚轮;悬臂一端铰接在第一箱体背离第二箱体的一侧,另一端连接在车体上;多个隔板竖直设置在第一箱体内,隔板将第一箱体分为多个腔体,腔体内设有播种机构;储药腔设置在架体上,储药腔内设有喷药机构。本发明的优点在于集喷药播种功能为一体,在播种时,对一些需要播种完喷药来防治害虫的农作物来说,可以播种、喷药同时进行,这样提高了效率,也方便农业生产,减轻农民的负担,

一种底部防滑的农用自动喷药装置.pdf
本发明公开了一种底部防滑的农用自动喷药装置,包括支撑架,所述支撑架顶部设有放药桶,所述放药桶顶部设有农药输入口,所述支撑架一侧设有电机,所述支撑架另一侧设有控制单元,所述支撑架底部设有负压装置,所述负压装置一侧与放药桶相连且另一侧与农药输送管道相连,所述负压装置底部设有旋转轴,所述旋转轴上设有机械手,所述机械手与农药输送管道相固定,所述农药输送管道底部设有雾化喷头,该种底部防滑的农用自动喷药装置,通过控制单元的控制,达到了进液、压缩、出液、360°旋转、喷涂与一体,实现了自动化,减少了使用者所需的人力,提