
一种具有自稳定系统的高空作业车及其自稳定控制方法.pdf

一条****彩妍


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种具有自稳定系统的高空作业车及其自稳定控制方法.pdf
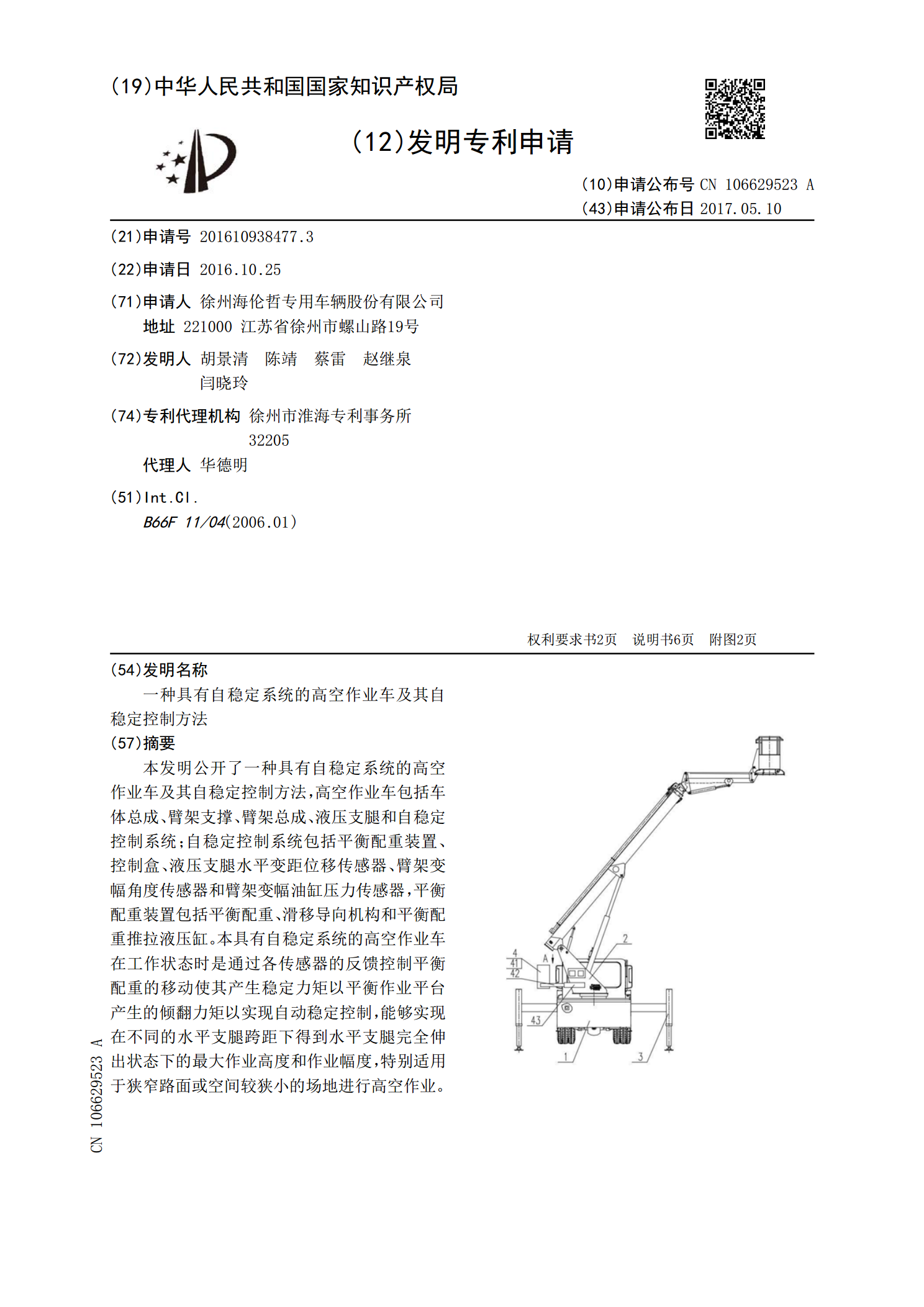
本发明公开了一种具有自稳定系统的高空作业车及其自稳定控制方法,高空作业车包括车体总成、臂架支撑、臂架总成、液压支腿和自稳定控制系统;自稳定控制系统包括平衡配重装置、控制盒、液压支腿水平变距位移传感器、臂架变幅角度传感器和臂架变幅油缸压力传感器,平衡配重装置包括平衡配重、滑移导向机构和平衡配重推拉液压缸。本具有自稳定系统的高空作业车在工作状态时是通过各传感器的反馈控制平衡配重的移动使其产生稳定力矩以平衡作业平台产生的倾翻力矩以实现自动稳定控制,能够实现在不同的水平支腿跨距下得到水平支腿完全伸出状态下的最大作
一种自稳定的蒸汽增压系统及其工作方法.pdf
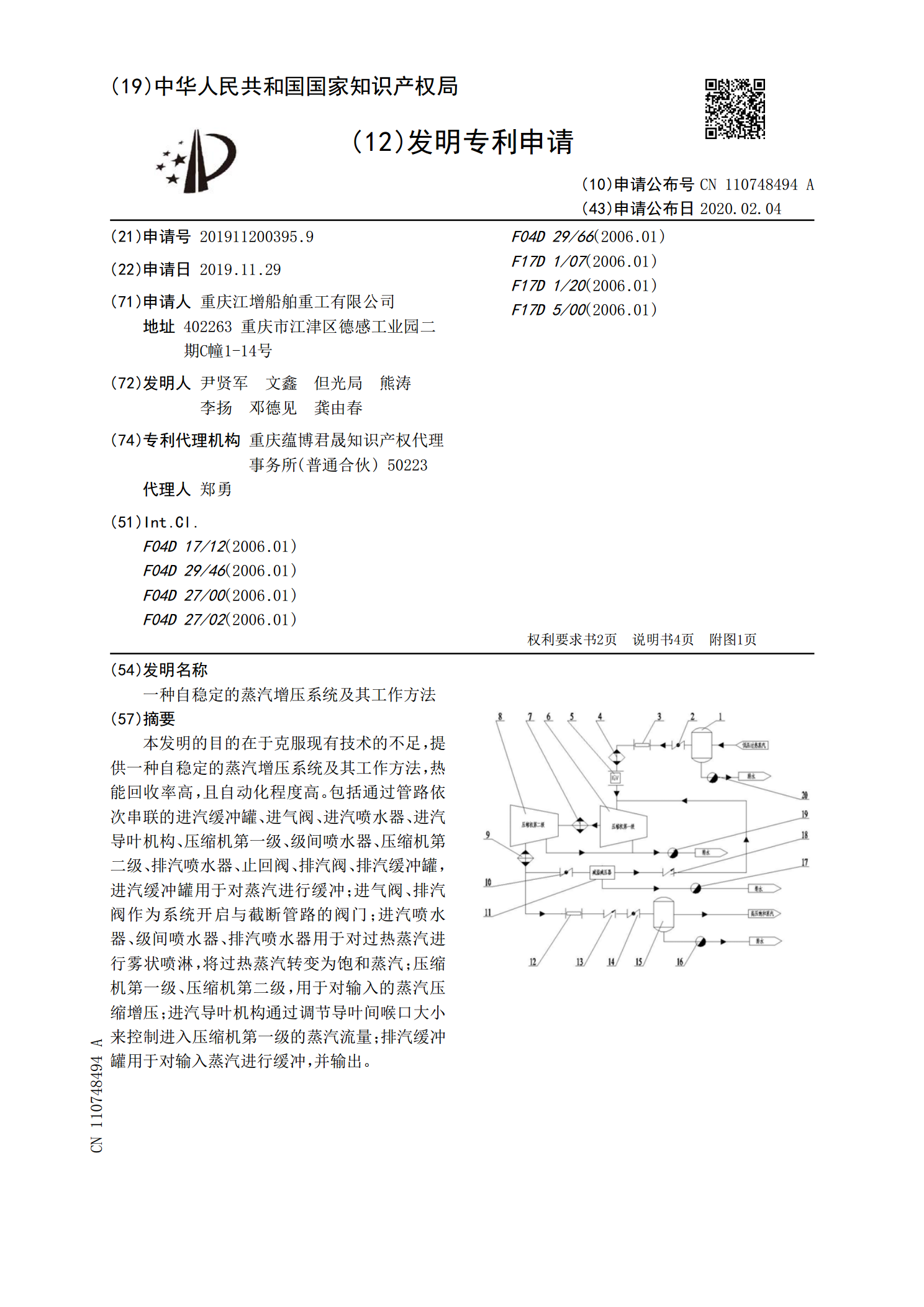
本发明的目的在于克服现有技术的不足,提供一种自稳定的蒸汽增压系统及其工作方法,热能回收率高,且自动化程度高。包括通过管路依次串联的进汽缓冲罐、进气阀、进汽喷水器、进汽导叶机构、压缩机第一级、级间喷水器、压缩机第二级、排汽喷水器、止回阀、排汽阀、排汽缓冲罐,进汽缓冲罐用于对蒸汽进行缓冲;进气阀、排汽阀作为系统开启与截断管路的阀门;进汽喷水器、级间喷水器、排汽喷水器用于对过热蒸汽进行雾状喷淋,将过热蒸汽转变为饱和蒸汽;压缩机第一级、压缩机第二级,用于对输入的蒸汽压缩增压;进汽导叶机构通过调节导叶间喉口大小来控
自稳定装置、带有自稳定装置的吊罐及吊罐自稳定方法.pdf
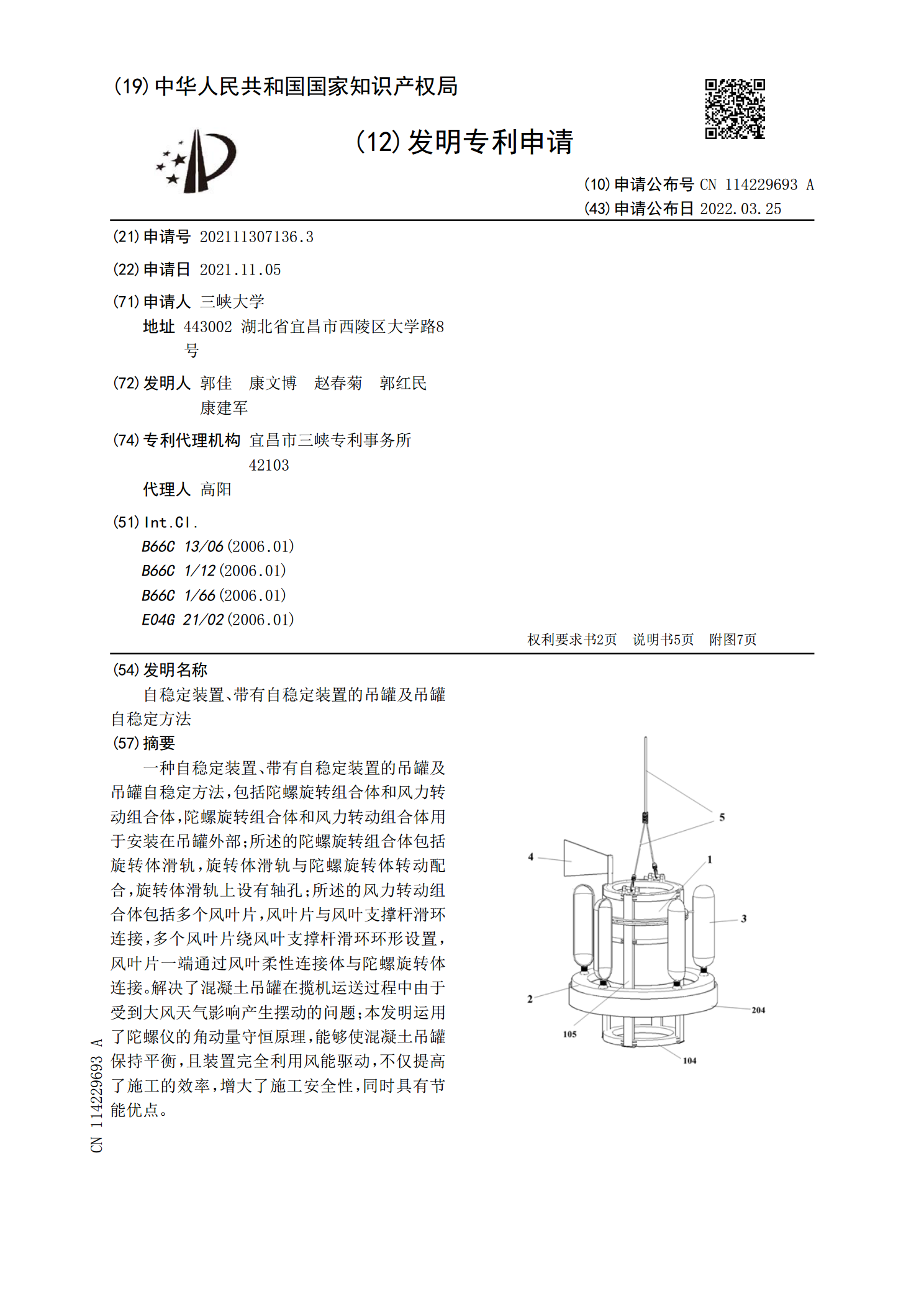
一种自稳定装置、带有自稳定装置的吊罐及吊罐自稳定方法,包括陀螺旋转组合体和风力转动组合体,陀螺旋转组合体和风力转动组合体用于安装在吊罐外部;所述的陀螺旋转组合体包括旋转体滑轨,旋转体滑轨与陀螺旋转体转动配合,旋转体滑轨上设有轴孔;所述的风力转动组合体包括多个风叶片,风叶片与风叶支撑杆滑环连接,多个风叶片绕风叶支撑杆滑环环形设置,风叶片一端通过风叶柔性连接体与陀螺旋转体连接。解决了混凝土吊罐在揽机运送过程中由于受到大风天气影响产生摆动的问题;本发明运用了陀螺仪的角动量守恒原理,能够使混凝土吊罐保持平衡,且装

高稳定智能自平衡装置及其控制方法.pdf
本发明提供一种高稳定智能自平衡装置及其控制方法,包括外框、可转动设置于所述外框上的封闭外壳、可转动设置于所述外壳内的旋转体、驱动所述外壳的第二驱动装置、驱动旋转体的第一驱动装置、检测组件、处理装置和控制装置,所述外壳的转动轴与所述旋转体的转动轴相垂直,所述检测组件包括用于采集数据的角度传感器、转速传感器、陀螺仪传感器和加速度传感器,所述处理装置分别连接所述检测组件和控制装置,所述控制装置连接所述第一驱动装置和第二驱动装置。本发明的高稳定智能自平衡装置,可安装在各种需要维持平衡的设备,尤其是动态不稳定设备(

不确定系统控制的自稳定域方法的推广.docx
不确定系统控制的自稳定域方法的推广随着现代化的不断发展,越来越多的工业和社会生产领域需要使用高效的自动化控制系统来提高生产效率和质量。然而,自动化控制系统本身也存在着一些问题,例如系统稳定性、安全性等。为了解决这些问题,自稳定域方法应运而生。在本文中,我们将介绍自稳定域方法的基本概念、原理和应用,并讨论其推广。一、自稳定域方法基本概念自稳定域方法是一种基于控制系统的自稳定性理论,通过对系统稳定性的分析和设计来提高自动化控制系统的稳定性和安全性。自稳定域方法主要是在控制系统中引入一些稳定性相关的变量,通过对