
一种液压打桩控制的自动校验方法及液压打桩锤.pdf

阳炎****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种液压打桩控制的自动校验方法及液压打桩锤.pdf
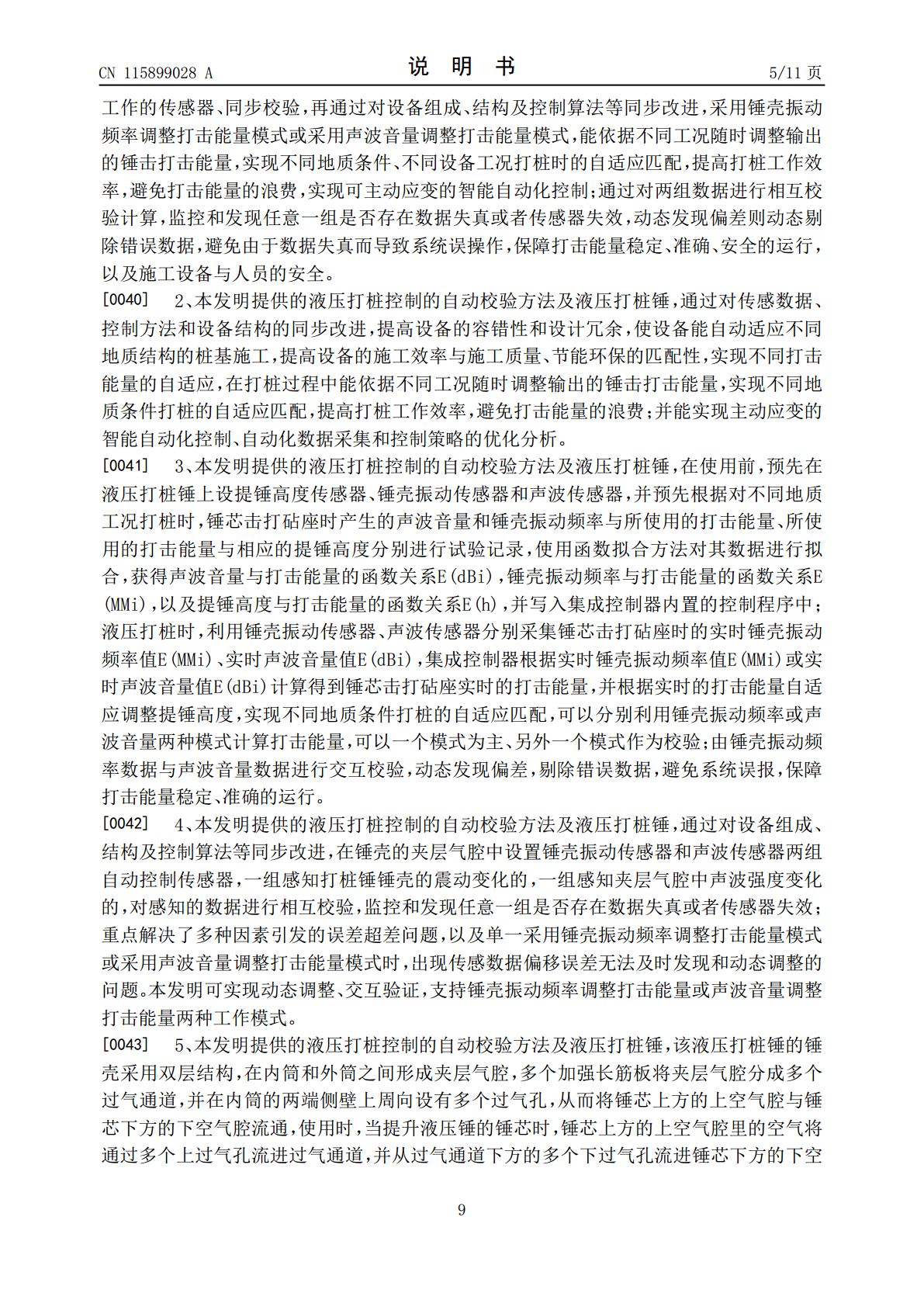
本发明公开了一种液压打桩控制的自动校验方法及液压打桩锤,该方法包括:S1、设置一液压打桩锤;S2、启动液压打桩锤;S3、集成控制器判断误差值是否在设定的范围内,若在设定的范围内,则继续进行打桩作业;S4、如若误差值超出范围,则校验确定可靠数据,继续进行打桩作业。本发明通过对设备组成、结构及控制算法同步改进,采用锤壳振动频率调整打击能量模式或采用声波音量调整打击能量模式,能依据不同工况随时调整输出的锤击打击能量,实现不同地质条件打桩的自适应匹配,提高打桩工作效率,避免打击能量的浪费,实现智能自动化控制;对两
一种液压打桩锤.pdf
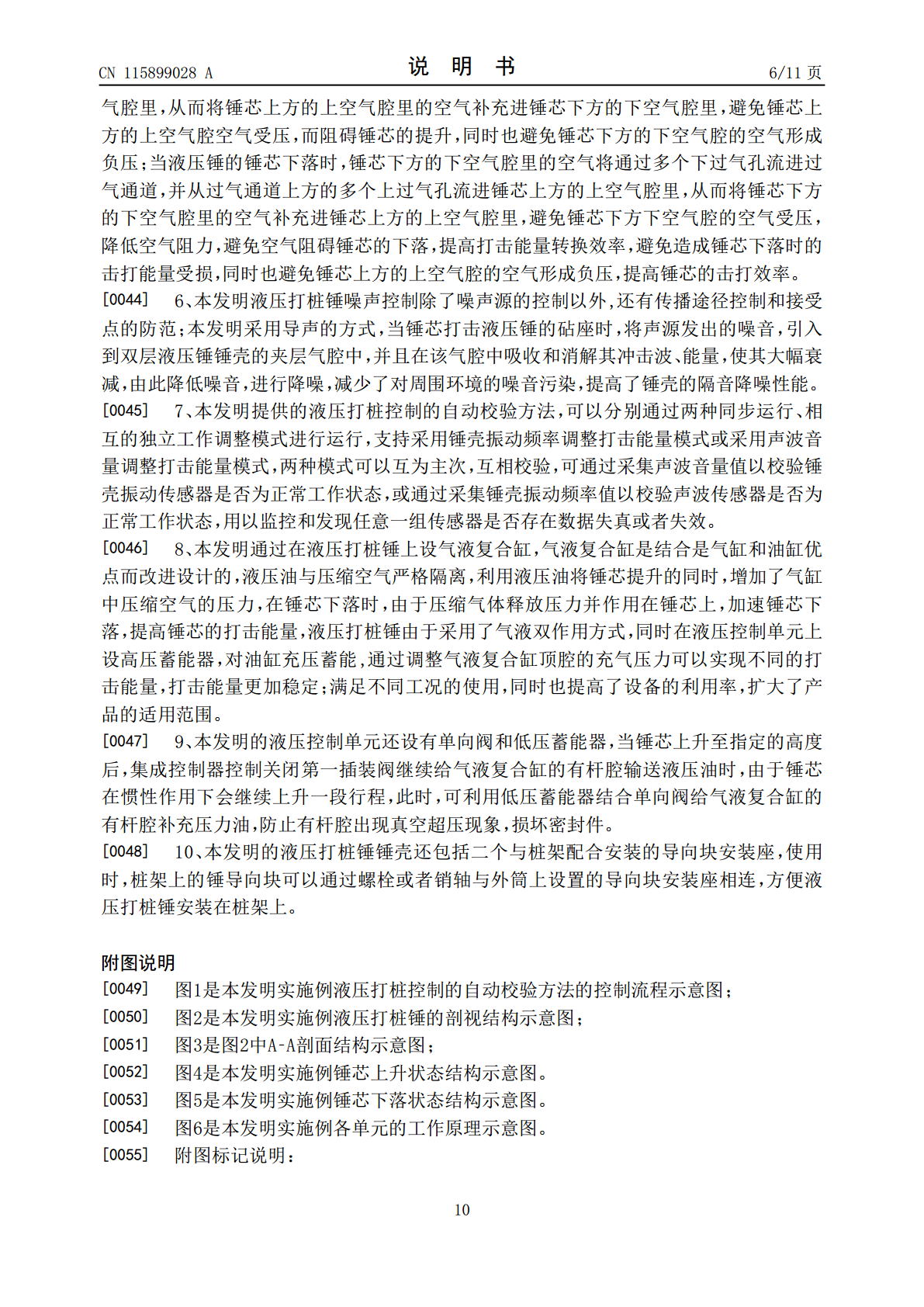
一种液压打桩锤,包括锤芯单元、锤壳体、桩帽组、提升油缸、连接轴总成、起落架、蓄能器单元、桩帽组、位移传感器及液压系统;锤芯单元通过紧固拉杆固装一体;提升油缸的缸筒端盖铰接安装于连接支架上,其下部活塞杆安装连接轴总成;压紧套组件置于锤芯单元的中心盲孔内,轴体上轴肩紧贴压紧座,定位圈将压紧套组件固装于锤芯单元上;轴体上轴肩和压紧座之间、轴体下轴肩下方分别安装轴体上、下缓冲垫;锤壳体的下壳框体内腔的四个内角设有导向板;桩帽组固装于锤壳体下方,多层橡胶垫位于上帽法兰的内圈上方,撞击块与冲击头底平面接触;本发明具有

液压打桩锤的液压驱动装置.pdf
本发明涉及一种工程机械,特别涉及一种液压打桩锤的液压驱动装置。技术方案为:一种液压打桩锤的液压驱动装置,包括有液压缸体,液压缸体的轴向两端分别设有缸盖及阀体,液压缸体内设有活塞及活塞杆,液压缸体上开设有进油口,液压缸体内套设有活塞缸,活塞及活塞杆处于该活塞缸内,液压缸体与该活塞缸之间的空间为液压油回油空间,活塞缸内具有提升腔及驱动腔,进油口与液压油回油空间导通,提升腔处设有提升腔进油通道,阀体上设有促使液压油回油空间与驱动腔导通的通道及促使驱动腔内的液压油回流至外部油箱内的回流通道。采用上述技术方案,提供
一种液压打桩锤快速提锤方法及装置.pdf
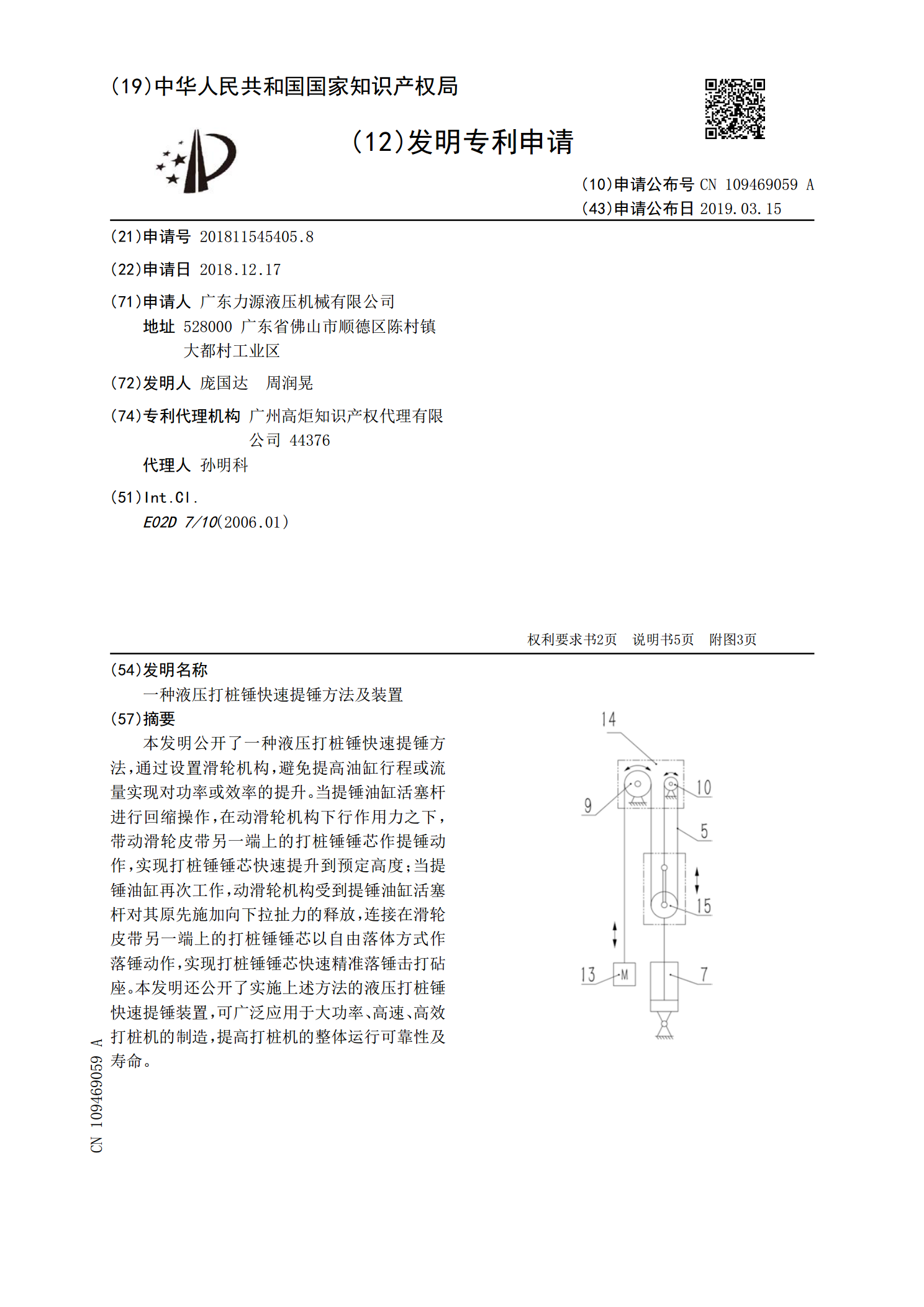
本发明公开了一种液压打桩锤快速提锤方法,通过设置滑轮机构,避免提高油缸行程或流量实现对功率或效率的提升。当提锤油缸活塞杆进行回缩操作,在动滑轮机构下行作用力之下,带动滑轮皮带另一端上的打桩锤锤芯作提锤动作,实现打桩锤锤芯快速提升到预定高度;当提锤油缸再次工作,动滑轮机构受到提锤油缸活塞杆对其原先施加向下拉扯力的释放,连接在滑轮皮带另一端上的打桩锤锤芯以自由落体方式作落锤动作,实现打桩锤锤芯快速精准落锤击打砧座。本发明还公开了实施上述方法的液压打桩锤快速提锤装置,可广泛应用于大功率、高速、高效打桩机的制造,
一种液压打桩锤的锤芯及其提升机构.pdf
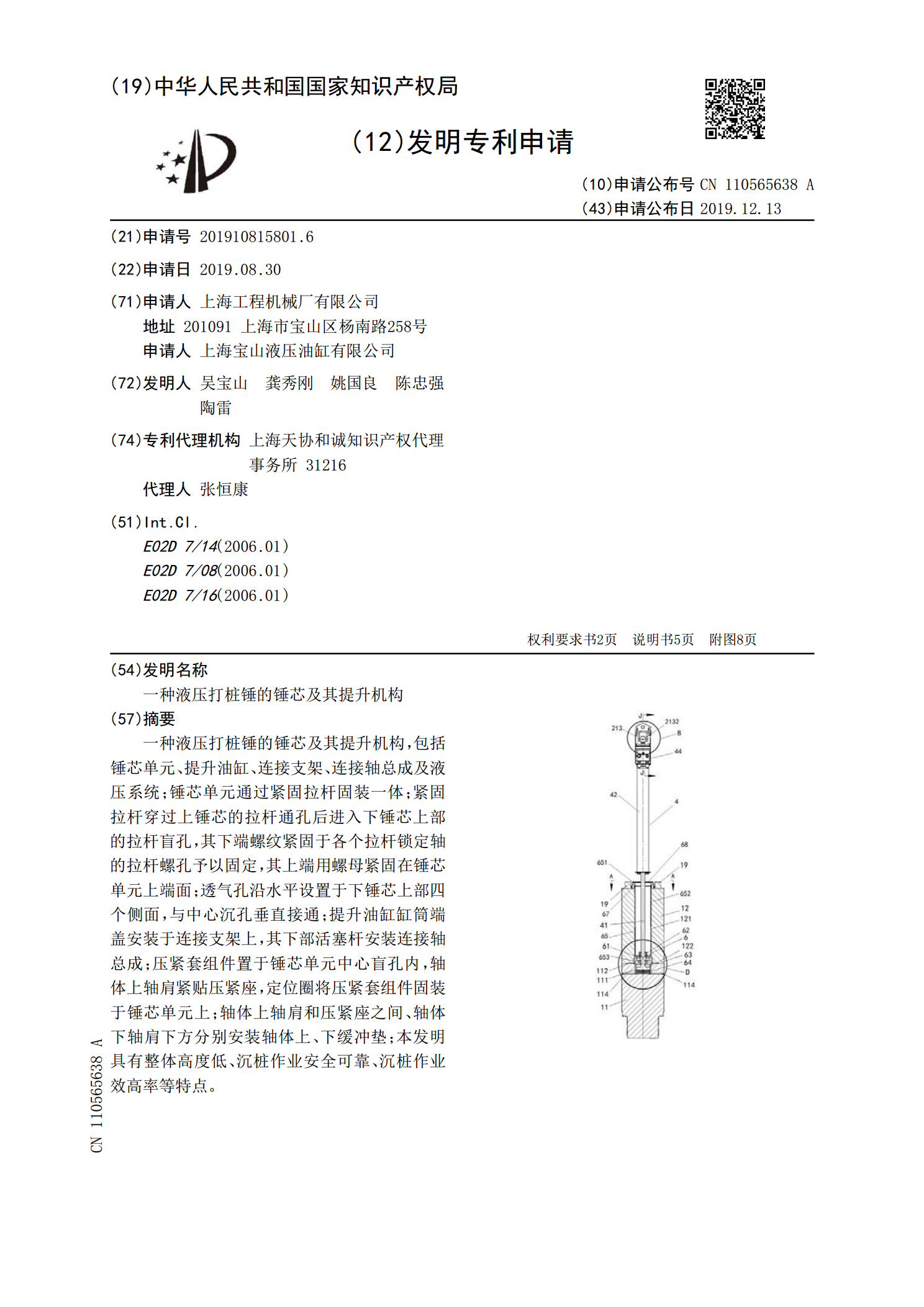
一种液压打桩锤的锤芯及其提升机构,包括锤芯单元、提升油缸、连接支架、连接轴总成及液压系统;锤芯单元通过紧固拉杆固装一体;紧固拉杆穿过上锤芯的拉杆通孔后进入下锤芯上部的拉杆盲孔,其下端螺纹紧固于各个拉杆锁定轴的拉杆螺孔予以固定,其上端用螺母紧固在锤芯单元上端面;透气孔沿水平设置于下锤芯上部四个侧面,与中心沉孔垂直接通;提升油缸缸筒端盖安装于连接支架上,其下部活塞杆安装连接轴总成;压紧套组件置于锤芯单元中心盲孔内,轴体上轴肩紧贴压紧座,定位圈将压紧套组件固装于锤芯单元上;轴体上轴肩和压紧座之间、轴体下轴肩下方