
起重机支腿支承力监测系统及方法.pdf

一只****生物

1/10
2/10
3/10
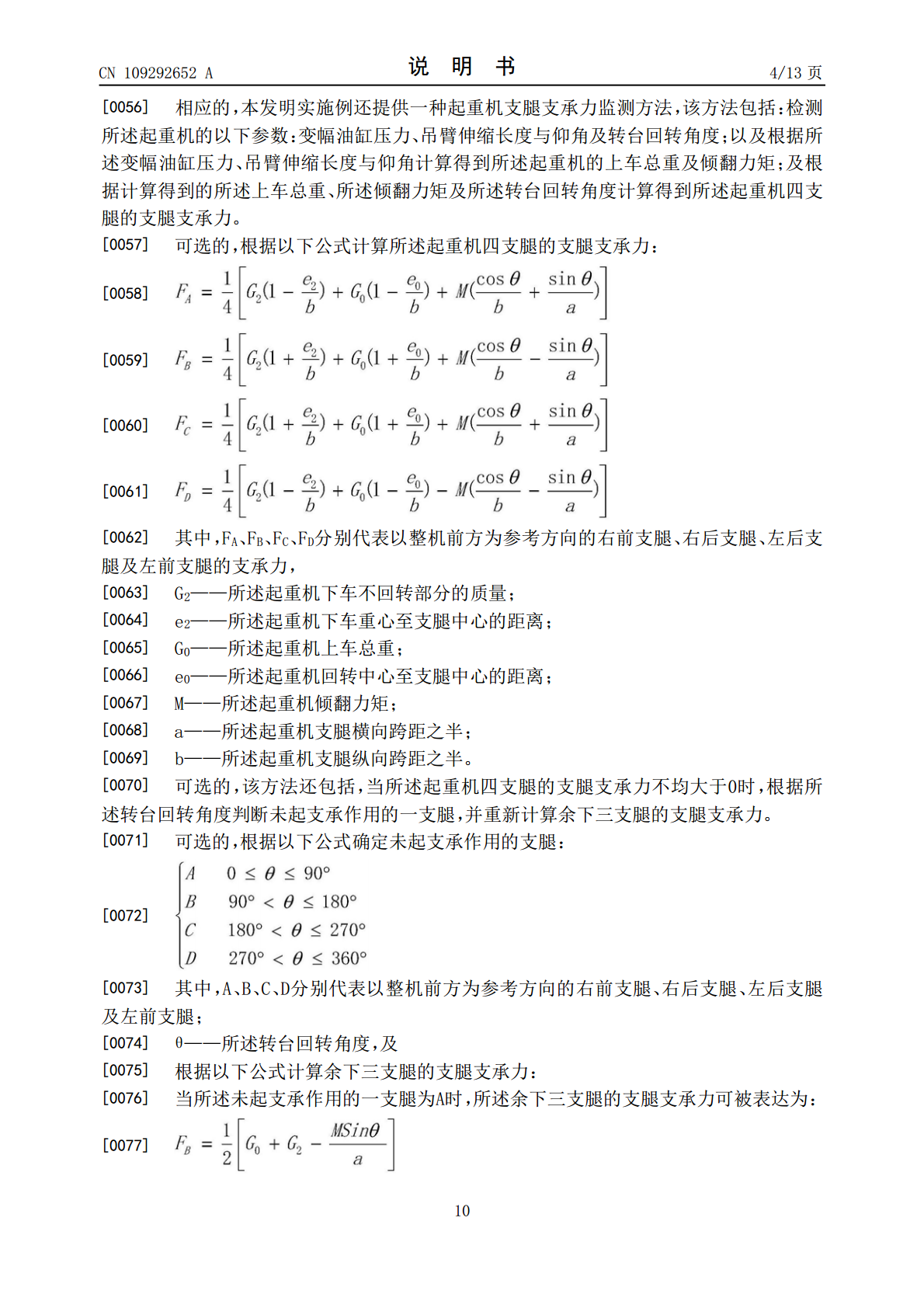
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
起重机支腿支承力监测系统及方法.pdf
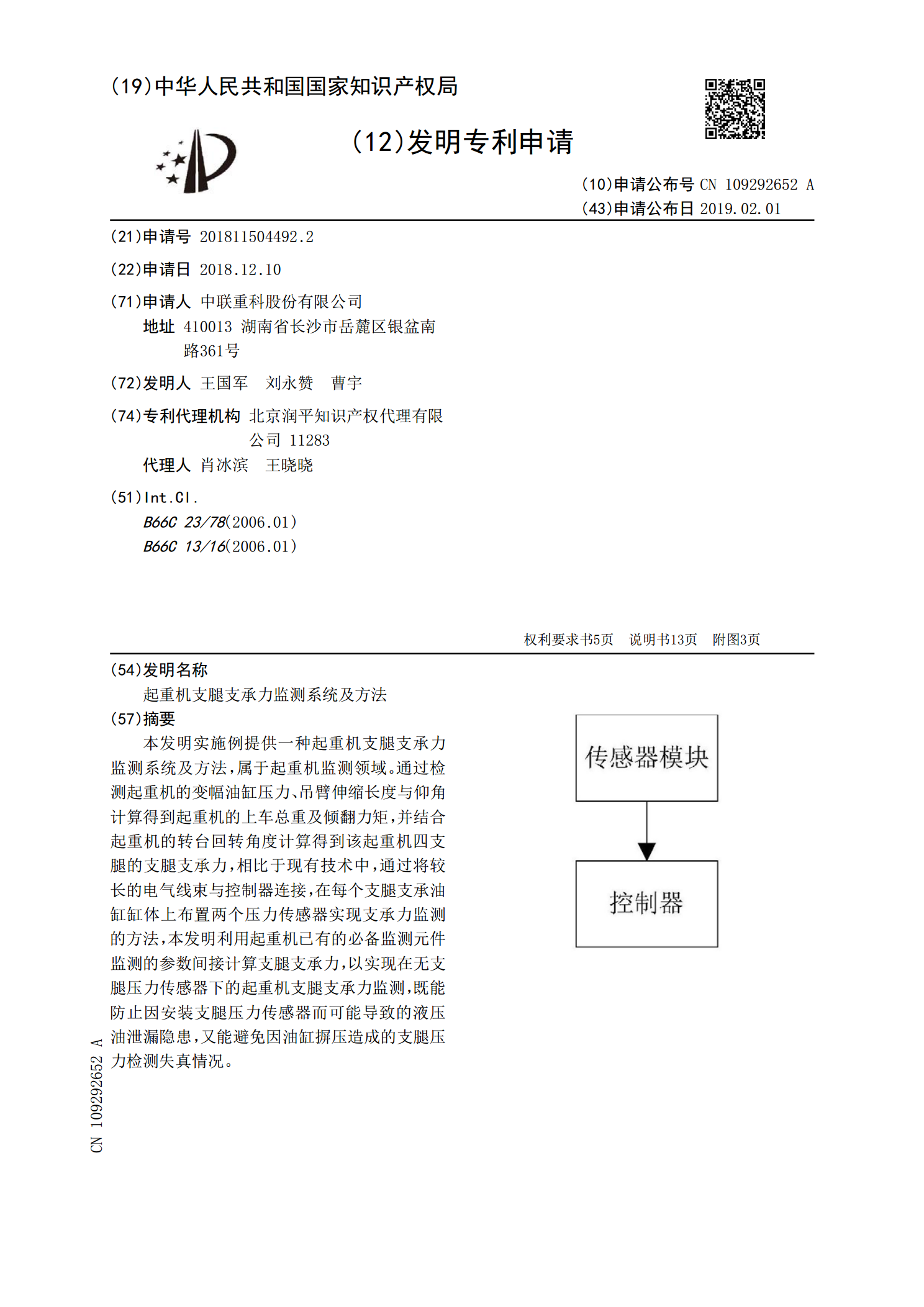
本发明实施例提供一种起重机支腿支承力监测系统及方法,属于起重机监测领域。通过检测起重机的变幅油缸压力、吊臂伸缩长度与仰角计算得到起重机的上车总重及倾翻力矩,并结合起重机的转台回转角度计算得到该起重机四支腿的支腿支承力,相比于现有技术中,通过将较长的电气线束与控制器连接,在每个支腿支承油缸缸体上布置两个压力传感器实现支承力监测的方法,本发明利用起重机已有的必备监测元件监测的参数间接计算支腿支承力,以实现在无支腿压力传感器下的起重机支腿支承力监测,既能防止因安装支腿压力传感器而可能导致的液压油泄漏隐患,又能避
用于垂直支腿展开、支腿展开的控制方法、系统及起重机.pdf
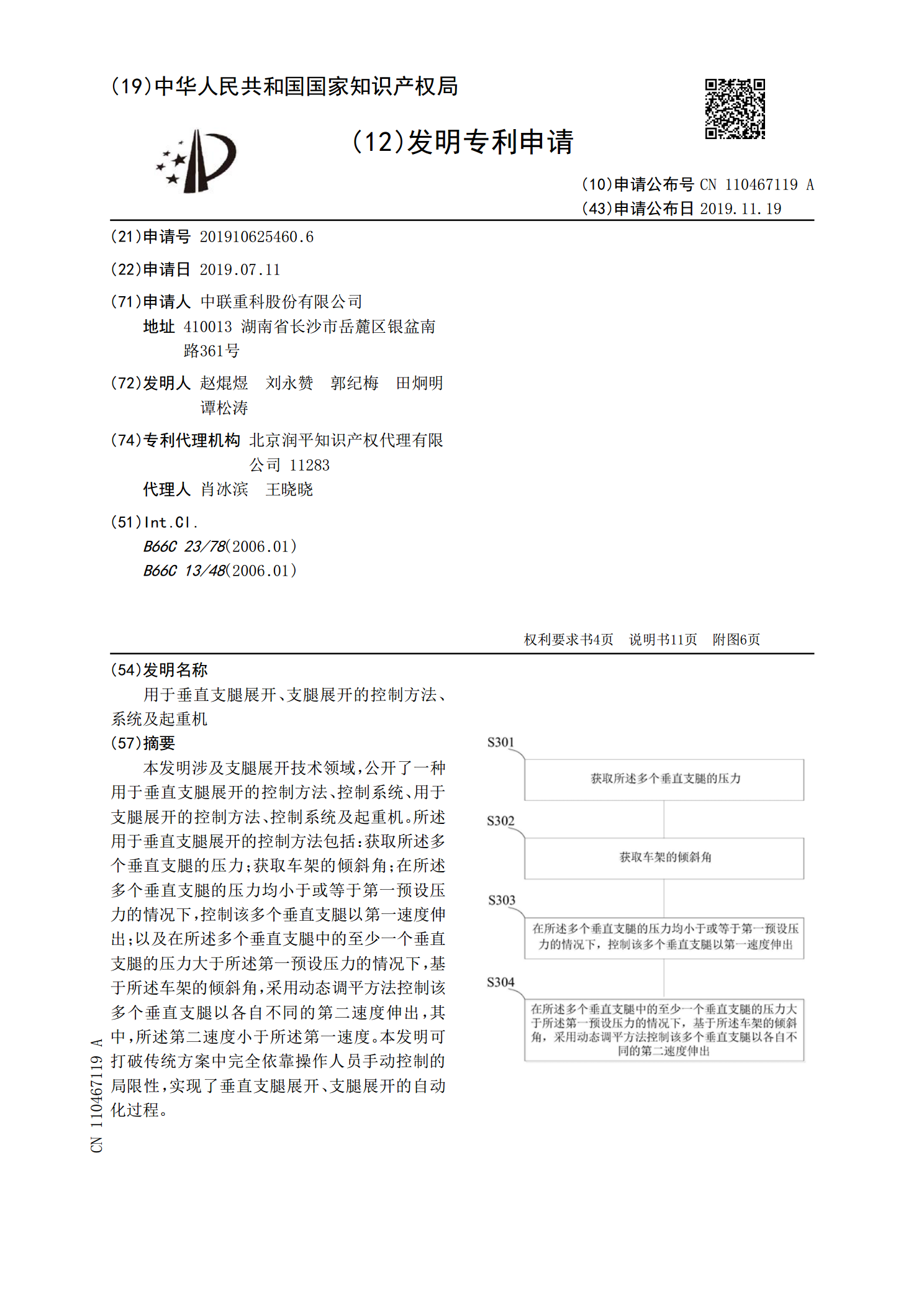
本发明涉及支腿展开技术领域,公开了一种用于垂直支腿展开的控制方法、控制系统、用于支腿展开的控制方法、控制系统及起重机。所述用于垂直支腿展开的控制方法包括:获取所述多个垂直支腿的压力;获取车架的倾斜角;在所述多个垂直支腿的压力均小于或等于第一预设压力的情况下,控制该多个垂直支腿以第一速度伸出;以及在所述多个垂直支腿中的至少一个垂直支腿的压力大于所述第一预设压力的情况下,基于所述车架的倾斜角,采用动态调平方法控制该多个垂直支腿以各自不同的第二速度伸出,其中,所述第二速度小于所述第一速度。本发明可打破传统方案中
起重机及其支腿操纵方法和系统.pdf
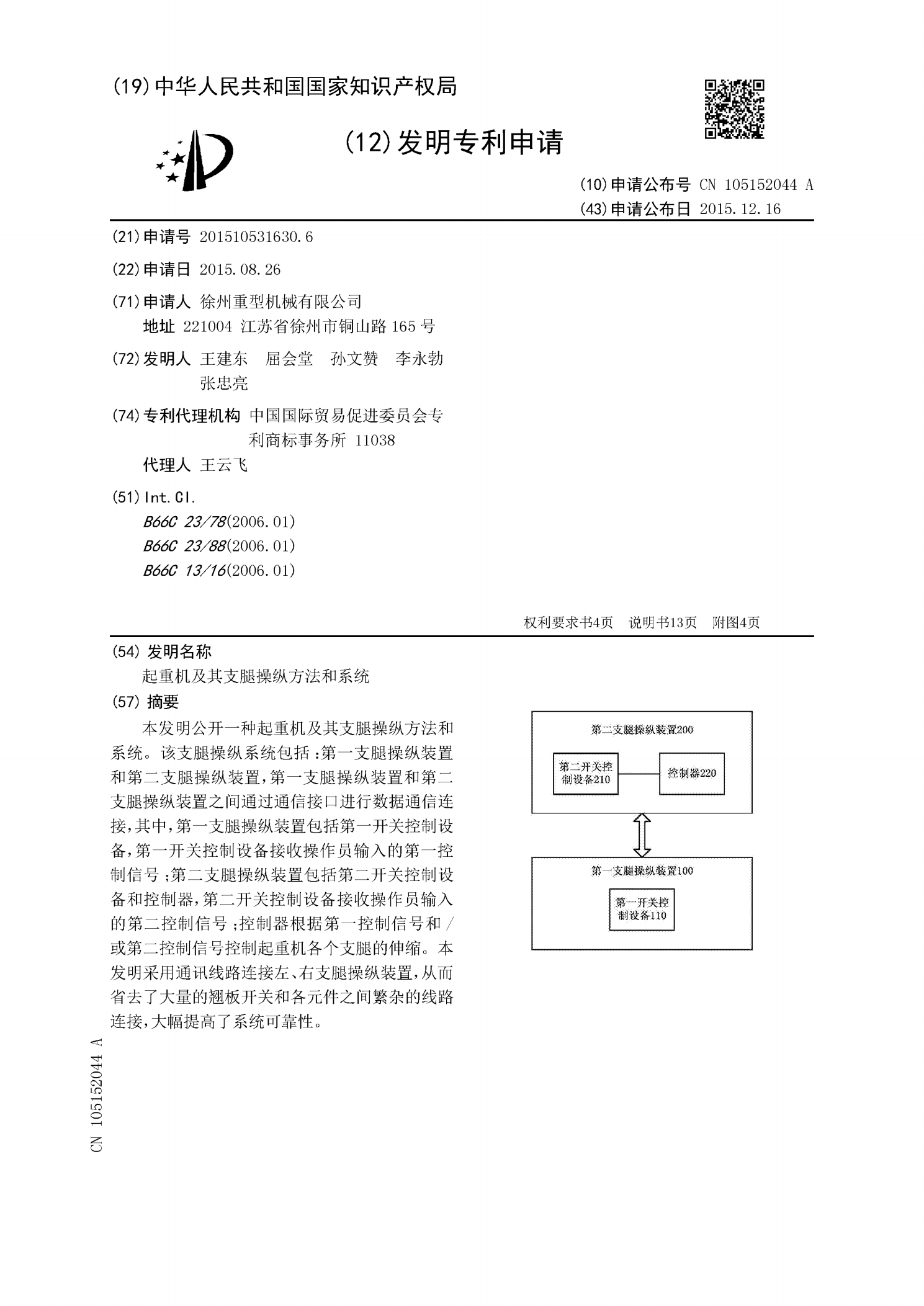
本发明公开一种起重机及其支腿操纵方法和系统。该支腿操纵系统包括:第一支腿操纵装置和第二支腿操纵装置,第一支腿操纵装置和第二支腿操纵装置之间通过通信接口进行数据通信连接,其中,第一支腿操纵装置包括第一开关控制设备,第一开关控制设备接收操作员输入的第一控制信号;第二支腿操纵装置包括第二开关控制设备和控制器,第二开关控制设备接收操作员输入的第二控制信号;控制器根据第一控制信号和/或第二控制信号控制起重机各个支腿的伸缩。本发明采用通讯线路连接左、右支腿操纵装置,从而省去了大量的翘板开关和各元件之间繁杂的线路连接,
外伸支腿监测系统及方法.pdf
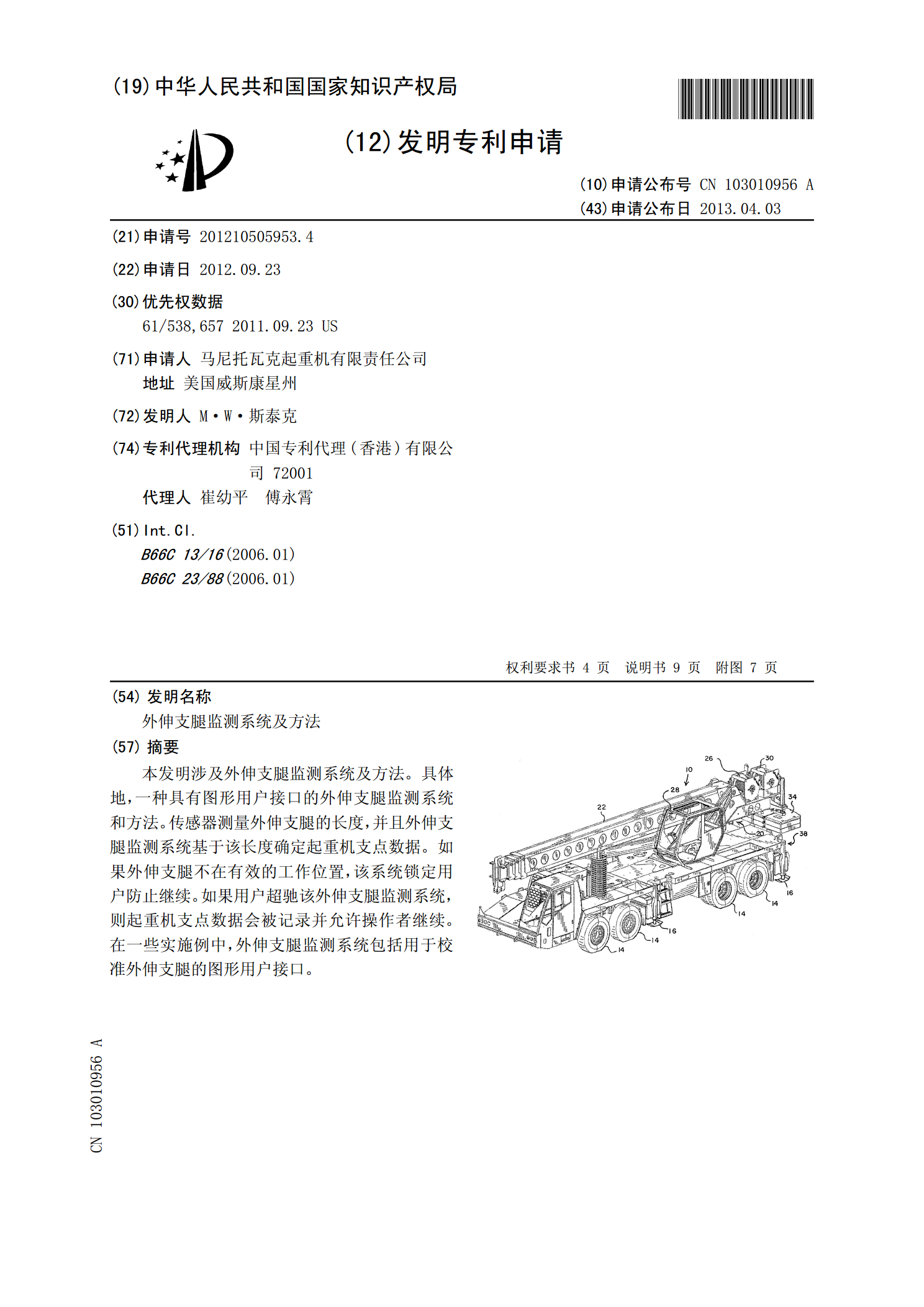
本发明涉及外伸支腿监测系统及方法。具体地,一种具有图形用户接口的外伸支腿监测系统和方法。传感器测量外伸支腿的长度,并且外伸支腿监测系统基于该长度确定起重机支点数据。如果外伸支腿不在有效的工作位置,该系统锁定用户防止继续。如果用户超驰该外伸支腿监测系统,则起重机支点数据会被记录并允许操作者继续。在一些实施例中,外伸支腿监测系统包括用于校准外伸支腿的图形用户接口。

基于应力应变技术的起重机支腿受力监测系统.pdf
本发明公开了基于应力应变技术的起重机支腿受力监测系统,包括中央处理器、语音模块、显示模块、短信收发模块,以及与中央处理器通过无线通信模块连接的主梁监测模块、电动葫芦监测模块、钢丝绳监测模块;本发明的主梁监测模块通过应力片和传感器对支腿的跨中、左端梁、右端梁的运动情况进行实时监测,使监测的数据更加精确,电动葫芦监测模块通过位移传感器对制动间隙进行实时监测,钢丝绳监测模块通过霍尔传感器对磁化的钢丝绳进行断丝情况的实时监测,然后将检测的数据传输给中央处理器,超过中央处理设定的阈值后,短信收发模块会自动发送报警短