
调平机构及调平方法.pdf

一吃****天材


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

调平机构及调平方法.pdf
本发明提供一种调平机构,包括安装在设备上的倾斜仪和多个丝杆升降支腿,所述设备上设有多个连接部,所述连接部的数量与丝杆升降支腿的数量相等,全部丝杆升降支腿分别与全部连接部相连接,所述丝杆升降支腿能带动连接部沿上下方向移动,所述倾斜仪能检测出设备的水平度。本发明利用倾斜仪检测设备的水平度,且当倾斜仪测得设备的水平度超出设定范围,至少一个丝杆升降支腿带动与其相连接的连接部沿上下方向移动,连接部在沿上下方向移动过程中将带动设备转动,并使设备的水平度随之变化,直至设备的水平度达到设定范围,从而实现对设备的水平度的调
一种设备安装调平机构及调平方法.pdf
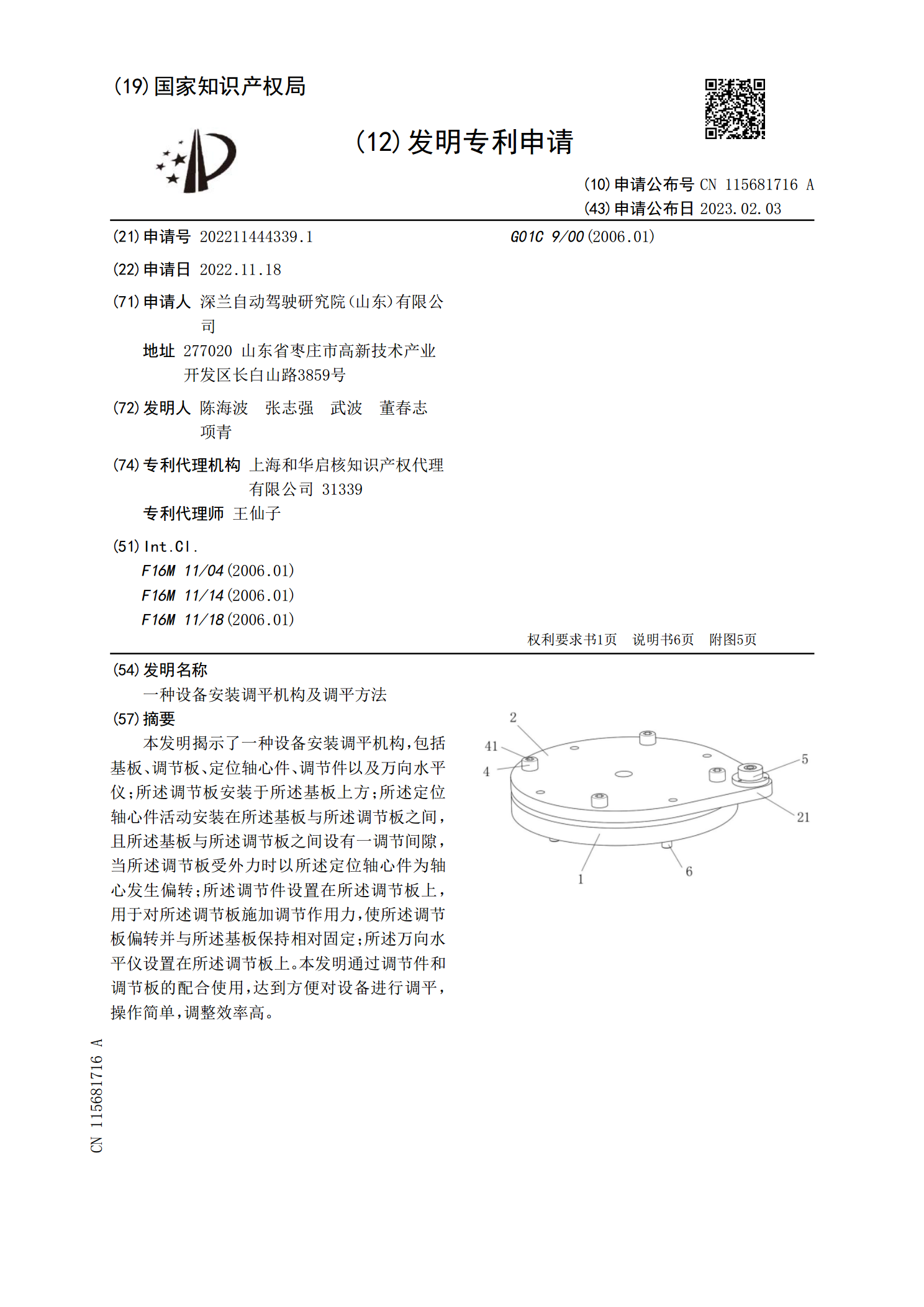
本发明揭示了一种设备安装调平机构,包括基板、调节板、定位轴心件、调节件以及万向水平仪;所述调节板安装于所述基板上方;所述定位轴心件活动安装在所述基板与所述调节板之间,且所述基板与所述调节板之间设有一调节间隙,当所述调节板受外力时以所述定位轴心件为轴心发生偏转;所述调节件设置在所述调节板上,用于对所述调节板施加调节作用力,使所述调节板偏转并与所述基板保持相对固定;所述万向水平仪设置在所述调节板上。本发明通过调节件和调节板的配合使用,达到方便对设备进行调平,操作简单,调整效率高。

箱体调平机构装置.pdf
箱体调平机构装置,由箱体、液压站、螺栓I、螺母I、垫圈I、支腿油缸、油缸支撑、螺栓II、螺母II、垫圈II组成。箱体的一端与液压站相连,另一端与螺栓I及螺母I及垫圈I及螺栓II及螺母II及垫圈II相连,螺栓I及螺母I及垫圈I的一端与箱体相连,另一端与支腿油缸相连,螺栓II及螺母II及垫圈II的一端与箱体相连,另一端与油缸支撑相连,支腿油缸的一端与螺栓I及螺母I及垫圈I相连,中间与支腿油缸的上支座及支腿油缸的平衡阀及支腿油缸的油管及支腿油缸的油缸体及支腿油缸的底座相连,另一端与油缸支撑相连,油缸支撑的一端与
冰箱的调平结构、调平组件、调平方法以及冰箱.pdf
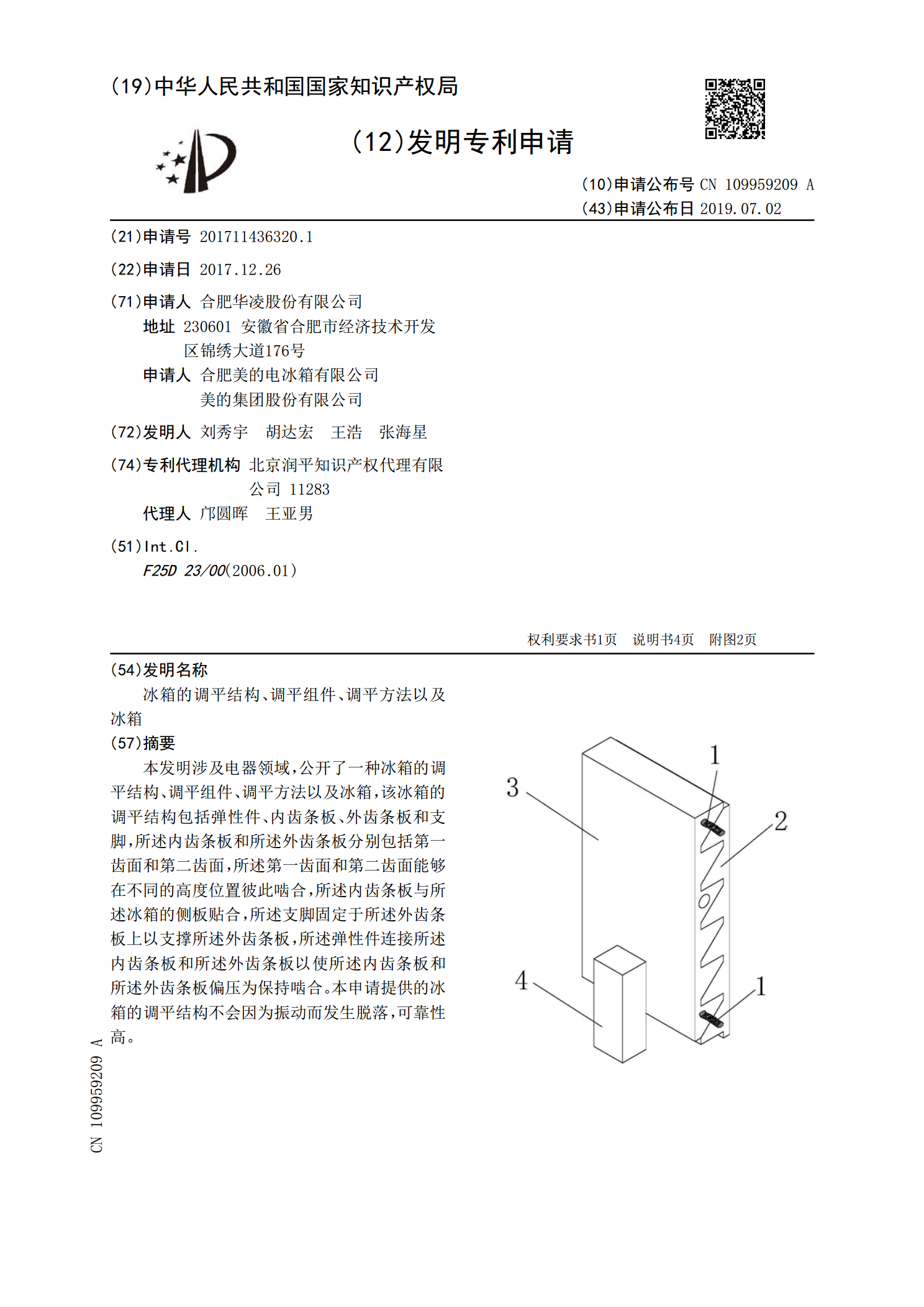
本发明涉及电器领域,公开了一种冰箱的调平结构、调平组件、调平方法以及冰箱,该冰箱的调平结构包括弹性件、内齿条板、外齿条板和支脚,所述内齿条板和所述外齿条板分别包括第一齿面和第二齿面,所述第一齿面和第二齿面能够在不同的高度位置彼此啮合,所述内齿条板与所述冰箱的侧板贴合,所述支脚固定于所述外齿条板上以支撑所述外齿条板,所述弹性件连接所述内齿条板和所述外齿条板以使所述内齿条板和所述外齿条板偏压为保持啮合。本申请提供的冰箱的调平结构不会因为振动而发生脱落,可靠性高。
调平脚及调平组件.pdf
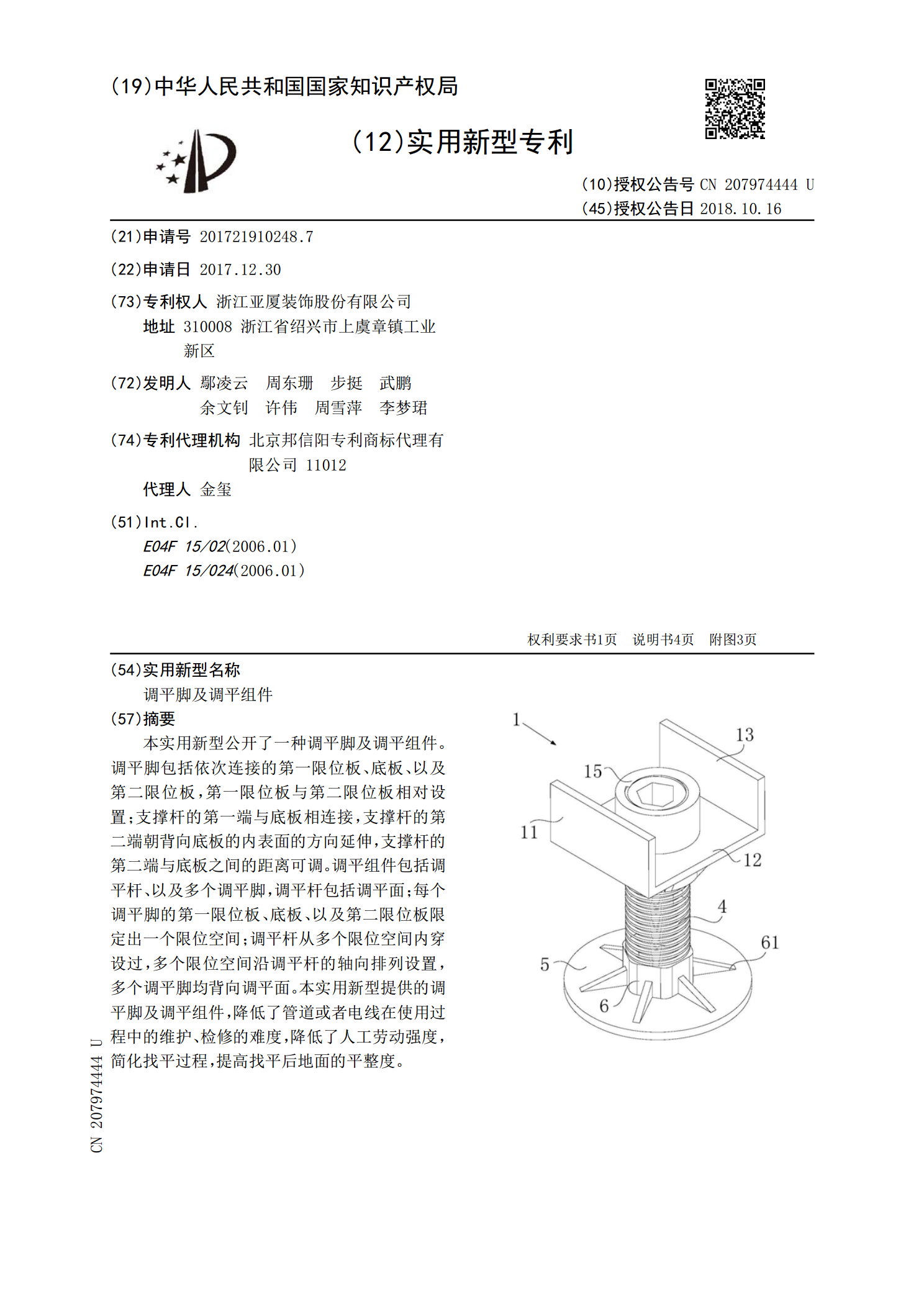
本实用新型公开了一种调平脚及调平组件。调平脚包括依次连接的第一限位板、底板、以及第二限位板,第一限位板与第二限位板相对设置;支撑杆的第一端与底板相连接,支撑杆的第二端朝背向底板的内表面的方向延伸,支撑杆的第二端与底板之间的距离可调。调平组件包括调平杆、以及多个调平脚,调平杆包括调平面;每个调平脚的第一限位板、底板、以及第二限位板限定出一个限位空间;调平杆从多个限位空间内穿设过,多个限位空间沿调平杆的轴向排列设置,多个调平脚均背向调平面。本实用新型提供的调平脚及调平组件,降低了管道或者电线在使用过程中的维护