
一种直线位移测量装置.pdf

宜欣****外呢


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种直线位移测量装置.pdf
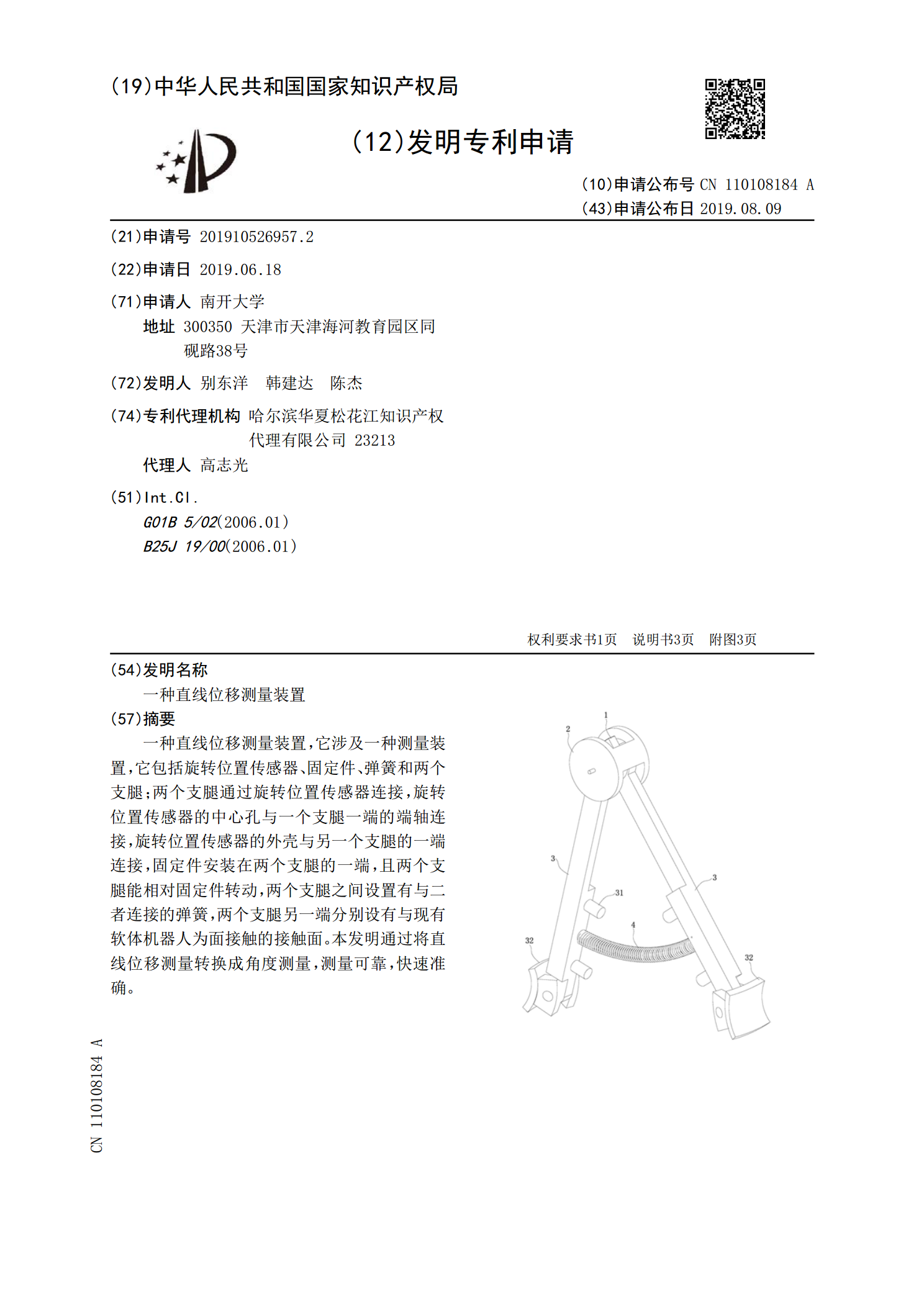
一种直线位移测量装置,它涉及一种测量装置,它包括旋转位置传感器、固定件、弹簧和两个支腿;两个支腿通过旋转位置传感器连接,旋转位置传感器的中心孔与一个支腿一端的端轴连接,旋转位置传感器的外壳与另一个支腿的一端连接,固定件安装在两个支腿的一端,且两个支腿能相对固定件转动,两个支腿之间设置有与二者连接的弹簧,两个支腿另一端分别设有与现有软体机器人为面接触的接触面。本发明通过将直线位移测量转换成角度测量,测量可靠,快速准确。
一种用于直线位移传感器的误差测量装置.pdf
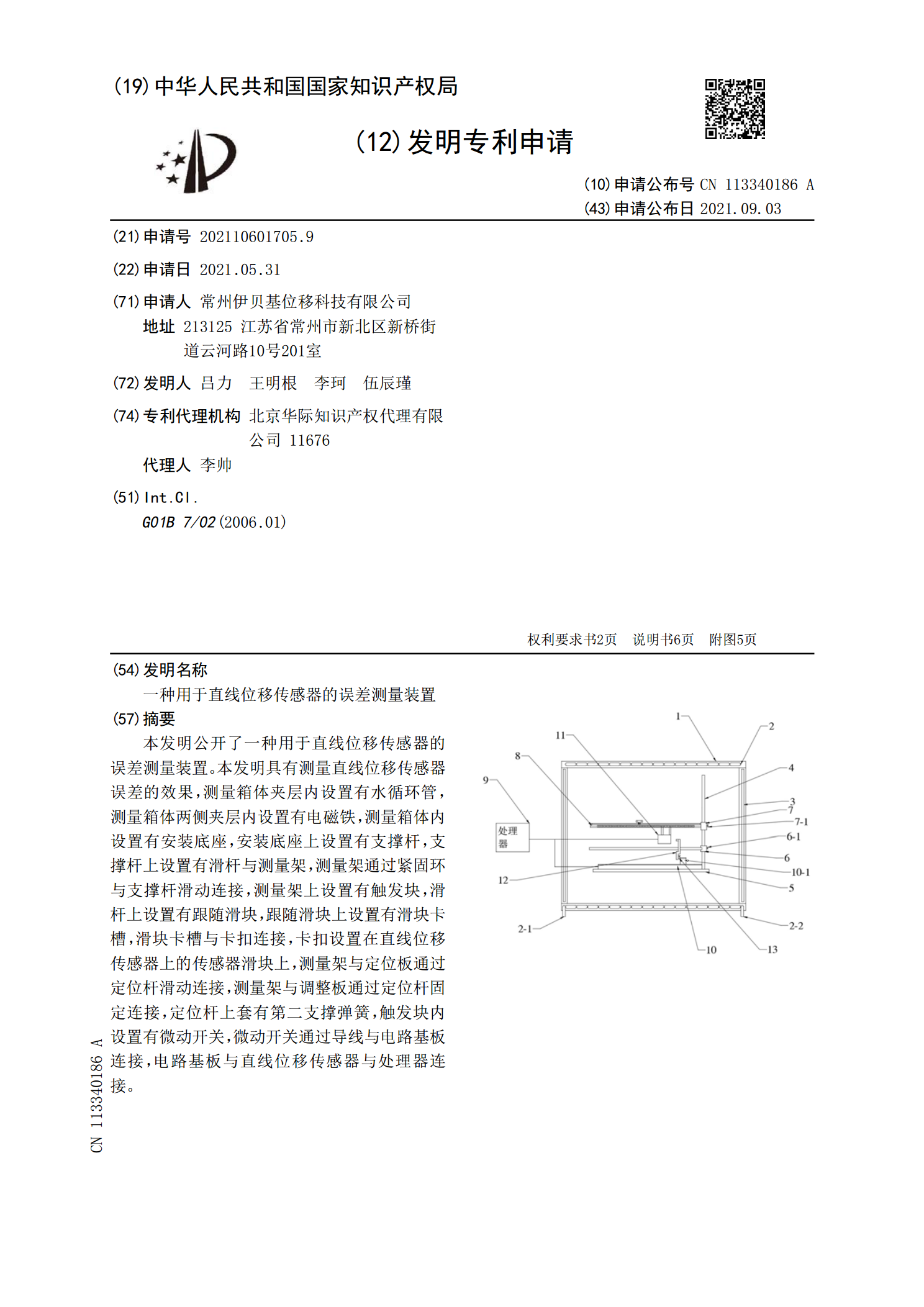
本发明公开了一种用于直线位移传感器的误差测量装置。本发明具有测量直线位移传感器误差的效果,测量箱体夹层内设置有水循环管,测量箱体两侧夹层内设置有电磁铁,测量箱体内设置有安装底座,安装底座上设置有支撑杆,支撑杆上设置有滑杆与测量架,测量架通过紧固环与支撑杆滑动连接,测量架上设置有触发块,滑杆上设置有跟随滑块,跟随滑块上设置有滑块卡槽,滑块卡槽与卡扣连接,卡扣设置在直线位移传感器上的传感器滑块上,测量架与定位板通过定位杆滑动连接,测量架与调整板通过定位杆固定连接,定位杆上套有第二支撑弹簧,触发块内设置有微动开
一种新型直线位移计量装置.pdf
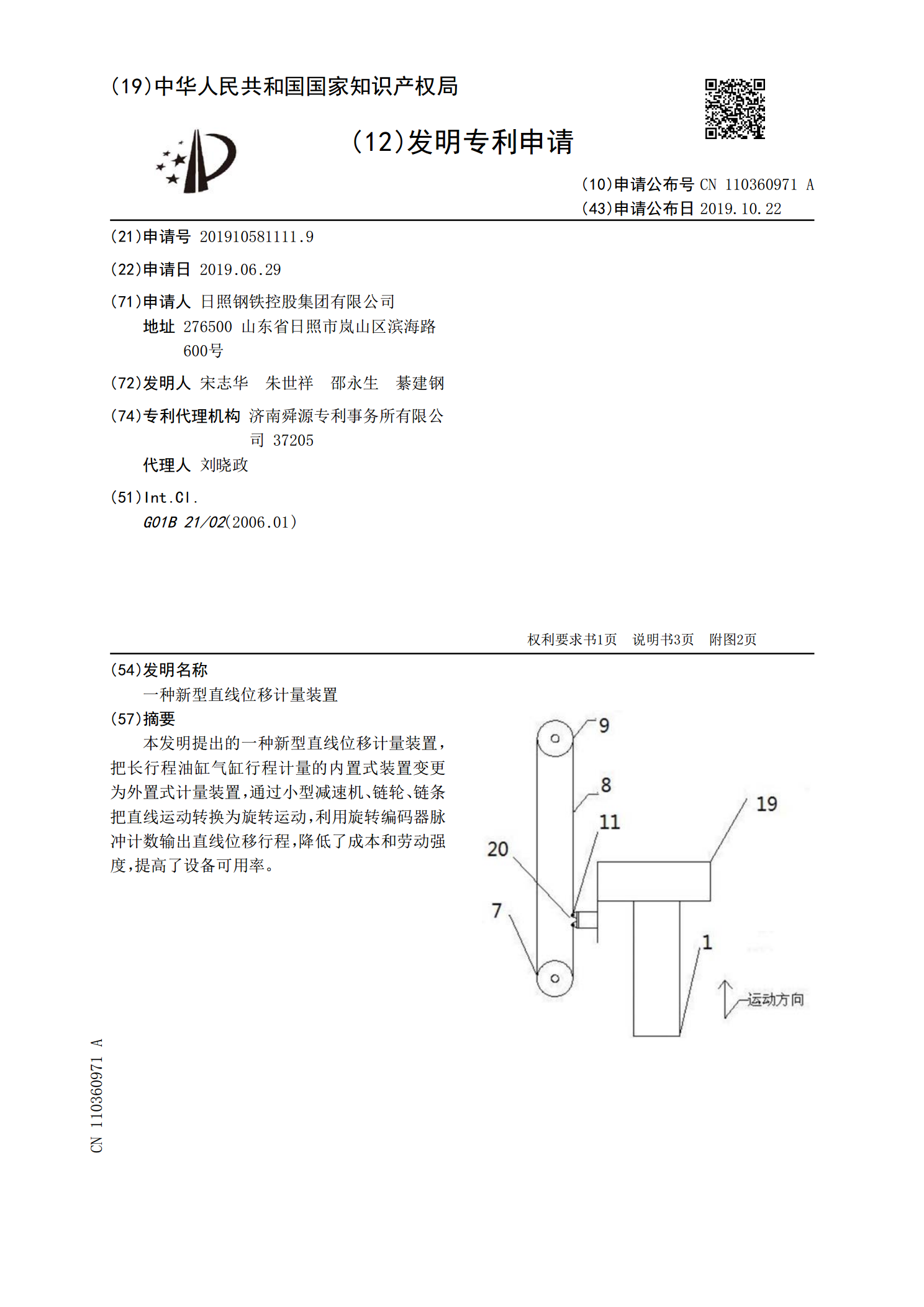
本发明提出的一种新型直线位移计量装置,把长行程油缸气缸行程计量的内置式装置变更为外置式计量装置,通过小型减速机、链轮、链条把直线运动转换为旋转运动,利用旋转编码器脉冲计数输出直线位移行程,降低了成本和劳动强度,提高了设备可用率。

一种水平位移测量装置.pdf
本发明提供了一种水平位移测量装置,包括:张丝、水平测量轮架、位移传感器和重锤;张丝的一端与第一固定物固定连接,另一端与重锤连接;水平测量轮架包括:背板、第一滑轮、第二滑轮和支架;背板固定于第二固定物上;第一滑轮和第二滑轮分别设置在背板的上部和下部;第一滑轮和所述第二滑轮的内边缘均与张丝抵接;第一滑轮的内边缘与第二滑轮的内边缘在同一条垂直于地面的垂直线上;支架设置在背板的中部,用于固定位移传感器;位移传感器的下端设置有线卡;线卡与张丝固定连接。应用本发明可以有效而快捷地限制重锤的大幅度摆动,提高测量的精度,
一种位移压力测量装置.pdf
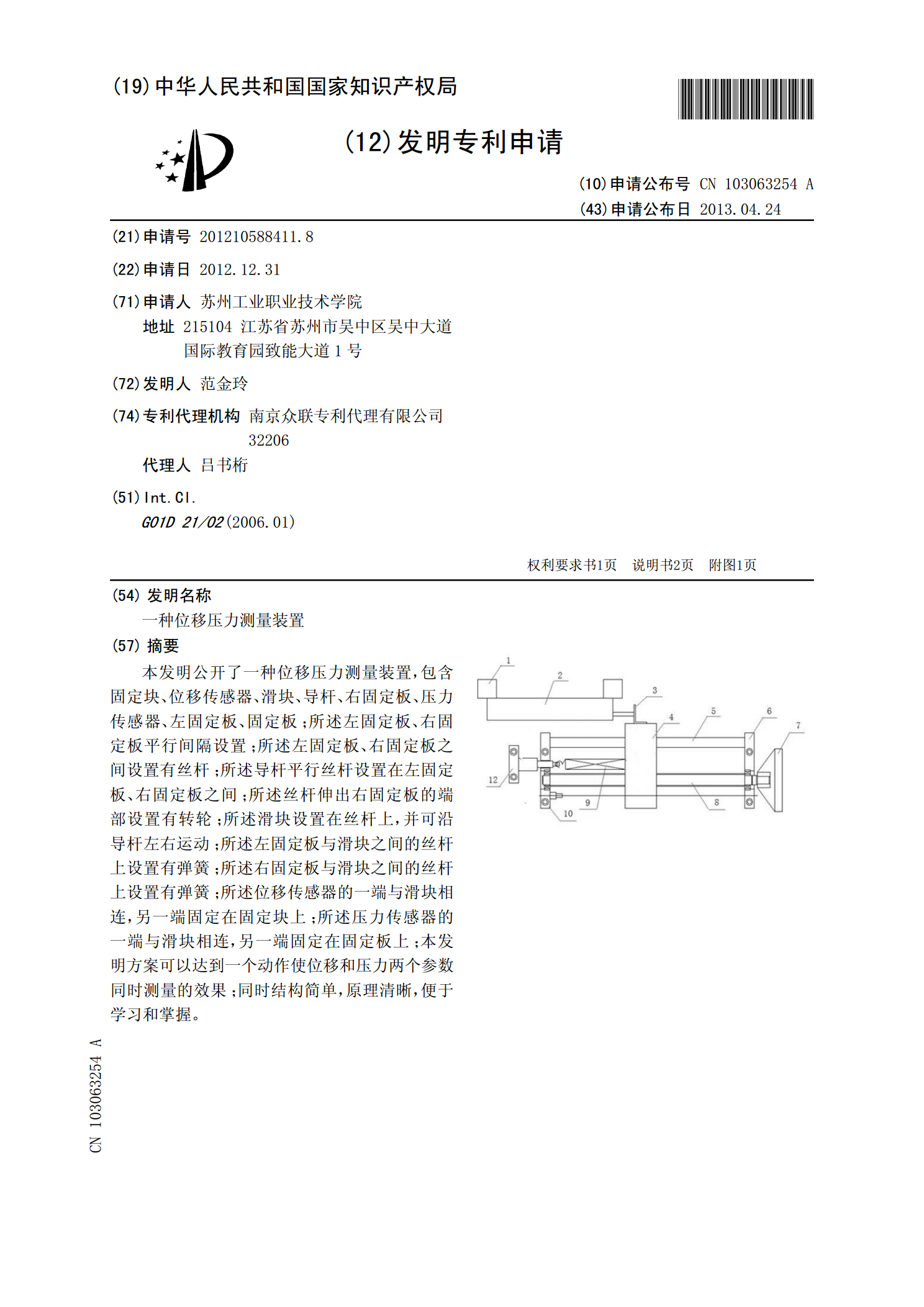
本发明公开了一种位移压力测量装置,包含固定块、位移传感器、滑块、导杆、右固定板、压力传感器、左固定板、固定板;所述左固定板、右固定板平行间隔设置;所述左固定板、右固定板之间设置有丝杆;所述导杆平行丝杆设置在左固定板、右固定板之间;所述丝杆伸出右固定板的端部设置有转轮;所述滑块设置在丝杆上,并可沿导杆左右运动;所述左固定板与滑块之间的丝杆上设置有弹簧;所述右固定板与滑块之间的丝杆上设置有弹簧;所述位移传感器的一端与滑块相连,另一端固定在固定块上;所述压力传感器的一端与滑块相连,另一端固定在固定板上;本发明方