
基于CESO的电液伺服系统线性自抗扰控制方法、系统.pdf

猫巷****永安

1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于CESO的电液伺服系统线性自抗扰控制方法、系统.pdf
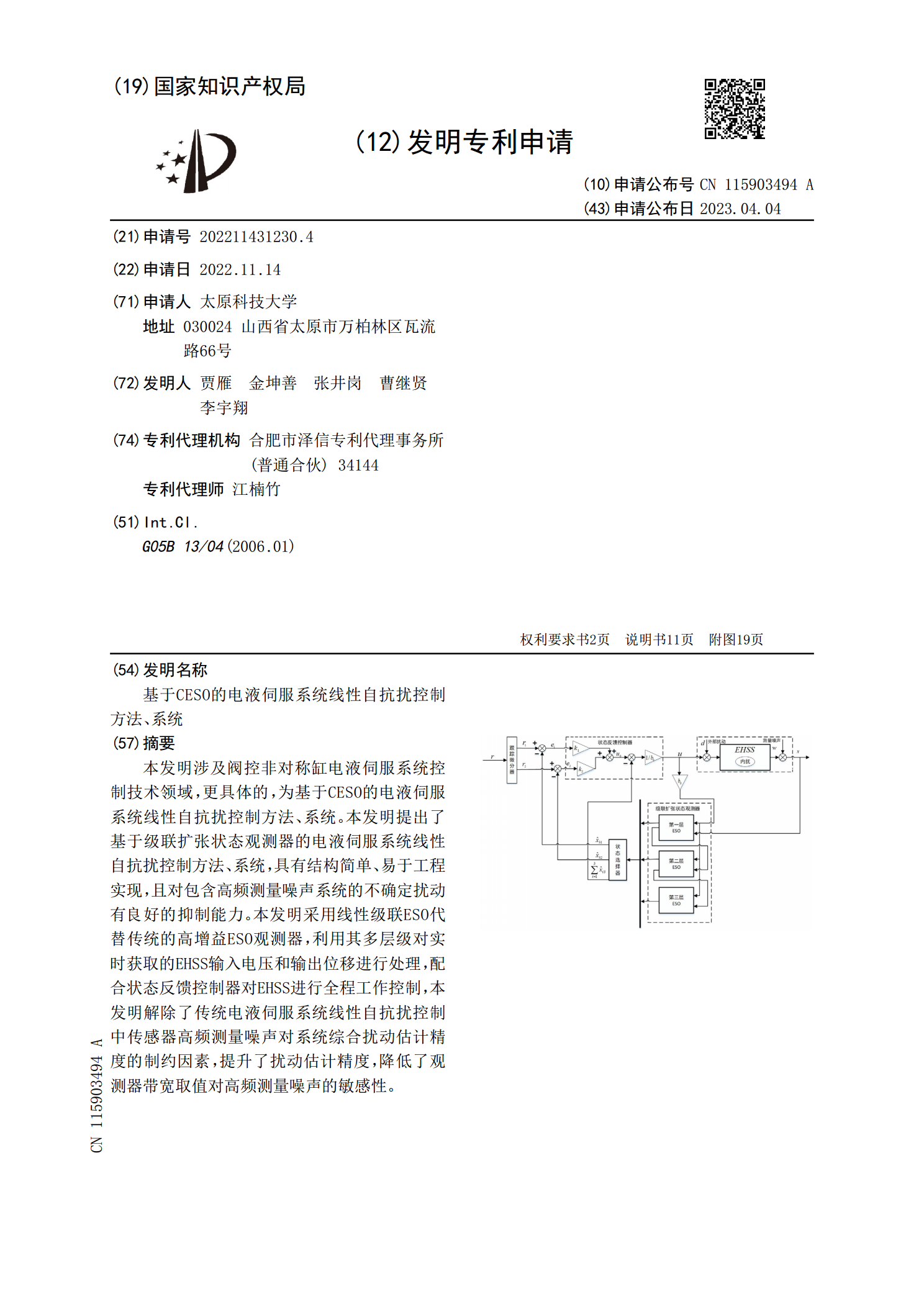
本发明涉及阀控非对称缸电液伺服系统控制技术领域,更具体的,为基于CESO的电液伺服系统线性自抗扰控制方法、系统。本发明提出了基于级联扩张状态观测器的电液伺服系统线性自抗扰控制方法、系统,具有结构简单、易于工程实现,且对包含高频测量噪声系统的不确定扰动有良好的抑制能力。本发明采用线性级联ESO代替传统的高增益ESO观测器,利用其多层级对实时获取的EHSS输入电压和输出位移进行处理,配合状态反馈控制器对EHSS进行全程工作控制,本发明解除了传统电液伺服系统线性自抗扰控制中传感器高频测量噪声对系统综合扰动估计精
基于线性自抗扰的固液变推力发动机控制器和控制方法.pdf
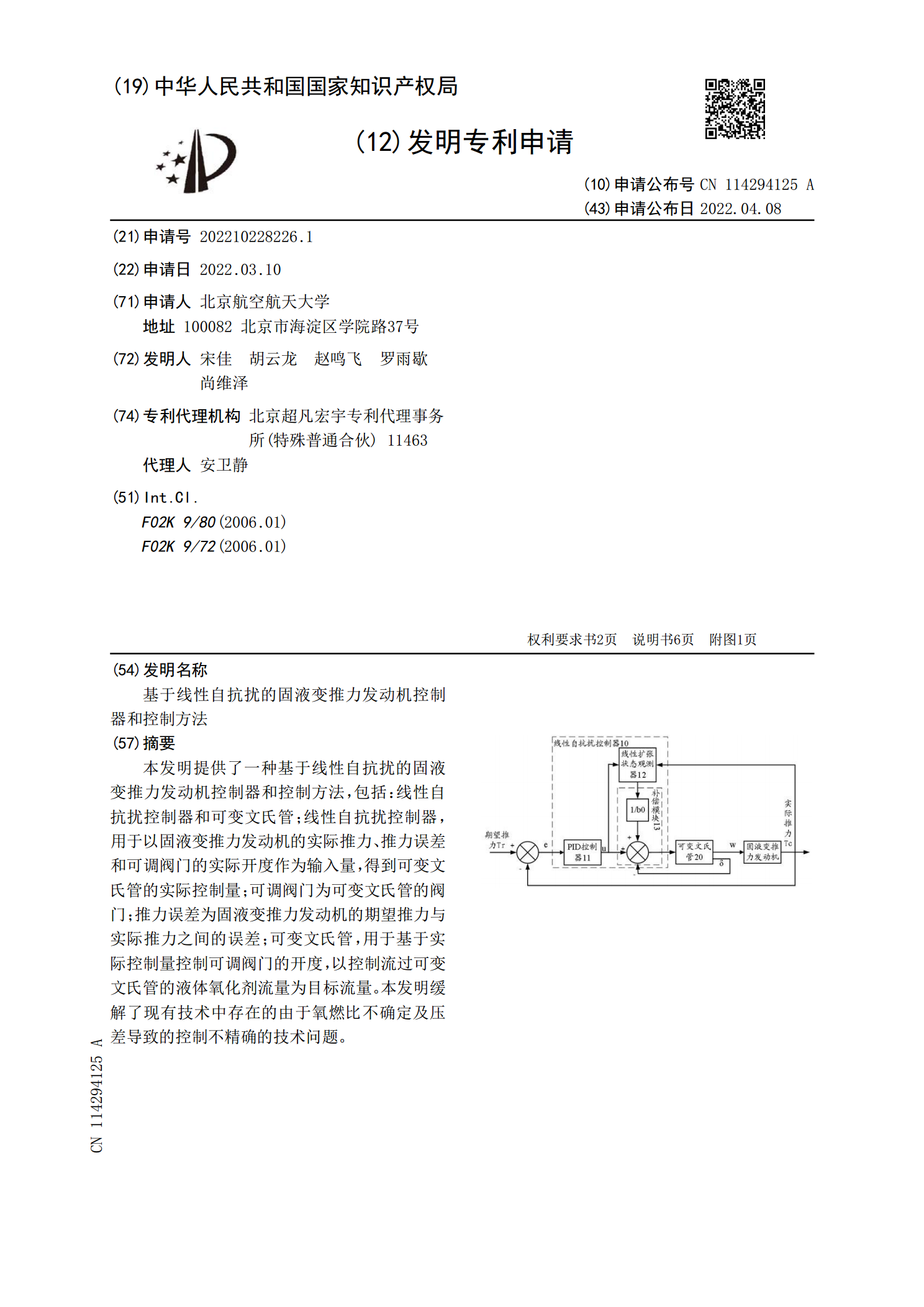
本发明提供了一种基于线性自抗扰的固液变推力发动机控制器和控制方法,包括:线性自抗扰控制器和可变文氏管;线性自抗扰控制器,用于以固液变推力发动机的实际推力、推力误差和可调阀门的实际开度作为输入量,得到可变文氏管的实际控制量;可调阀门为可变文氏管的阀门;推力误差为固液变推力发动机的期望推力与实际推力之间的误差;可变文氏管,用于基于实际控制量控制可调阀门的开度,以控制流过可变文氏管的液体氧化剂流量为目标流量。本发明缓解了现有技术中存在的由于氧燃比不确定及压差导致的控制不精确的技术问题。

基于自抗扰算法的液位控制系统的任务书.docx
基于自抗扰算法的液位控制系统的任务书一、背景液位控制系统是工业生产过程中非常重要的控制系统之一。其主要任务是对液体的流量、进出口压力、容器尺寸等参数进行控制,以保证液位在设定范围内。液位控制系统的应用领域非常广泛,包括石油化工、制药、食品加工等。由于液位控制系统所涉及的因素比较多,控制难度颇大,因此需要运用现代控制技术来提高控制效果。二、研究内容本项目是针对液位控制系统的自抗扰控制算法进行研究。首先,对液位控制系统进行建模和仿真,确定其控制对象和控制参数。其次,研究各种自抗扰控制算法,并选取适合液位控制系

行进间伺服系统的自抗扰控制算法研究的开题报告.docx
行进间伺服系统的自抗扰控制算法研究的开题报告一、选题背景伺服系统因其高精度、高速度、高可靠性在机械制造和自动化领域中得到了广泛应用,但其运动过程受到多种外界因素的干扰,如摩擦力、惯性等,这些因素可能导致系统运动不稳定、误差增大甚至失控。因此,如何解决伺服系统在行进过程中的自抗扰问题已经成为当前自动化控制领域亟待解决的问题。二、研究目的本文旨在研究伺服系统行进过程中的自抗扰控制算法,探究其在抵抗系统干扰、提高伺服系统运动稳定性和精度等方面的应用。三、研究内容1.控制系统建模和参数识别伺服系统一般由电机、传动
永磁同步电机伺服系统控制中的自抗扰控制策略.pdf
永磁同步电机伺服系统控制中的自抗扰控制策略近年来,永磁同步电机(PermanentMagnetSynchronousMotor,PMSM)在伺服系统领域得到了广泛的应用,其高效、高性能的特点使其成为工业控制领域的热门选择。在PMSM伺服系统中,控制策略的选择至关重要,而自抗扰控制策略(ActiveDisturbanceRejectionControl,ADRC)正是一种被广泛应用和研究的控制策略之一。本文将就永磁同步电机伺服系统控制中的自抗扰控制策略进行详细的探讨,希望能为您带来新的见解和启发。让我们简要