
一种弹簧操动机构转运用翻转工装.pdf

东耀****哥哥

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种弹簧操动机构转运用翻转工装.pdf
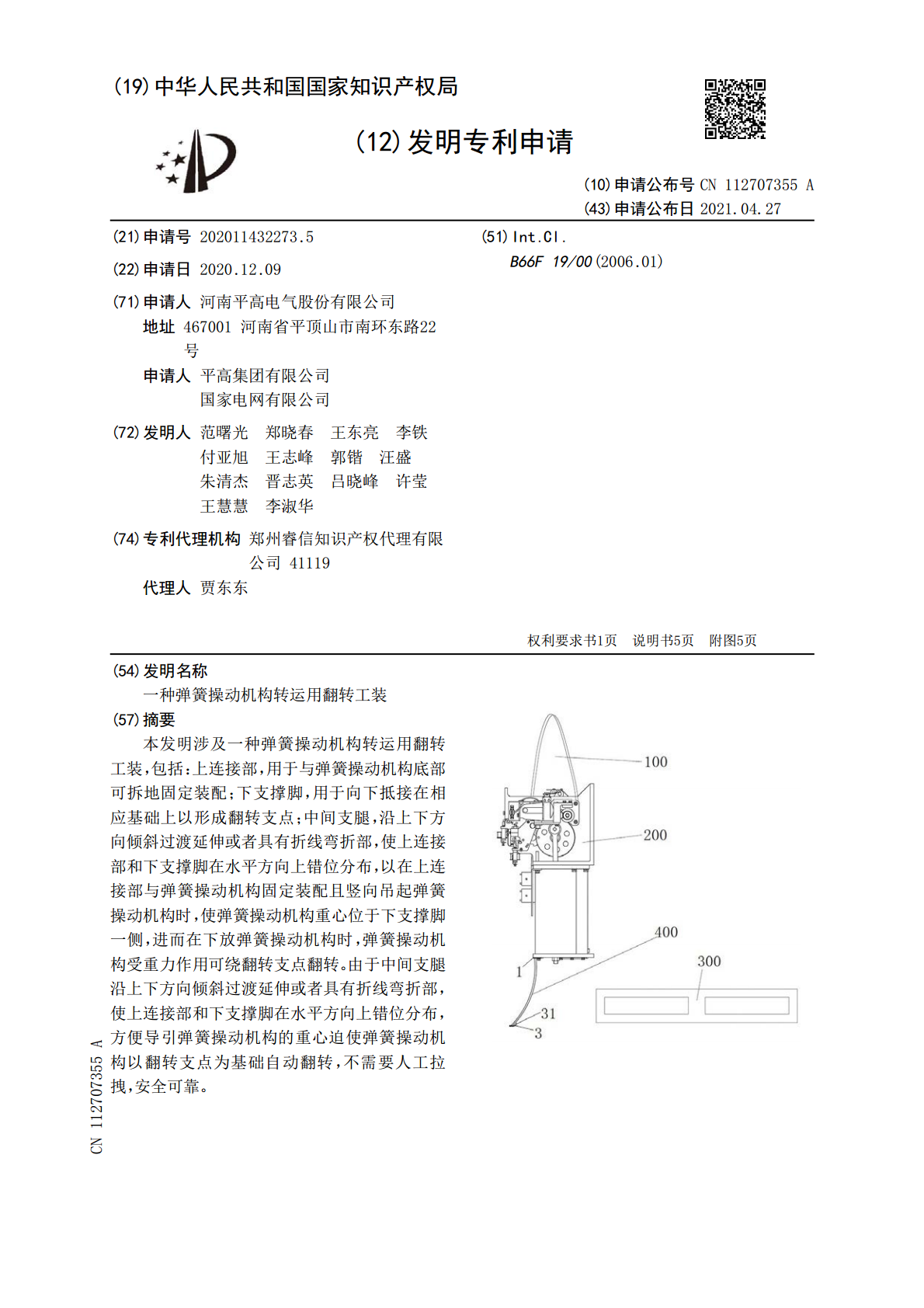
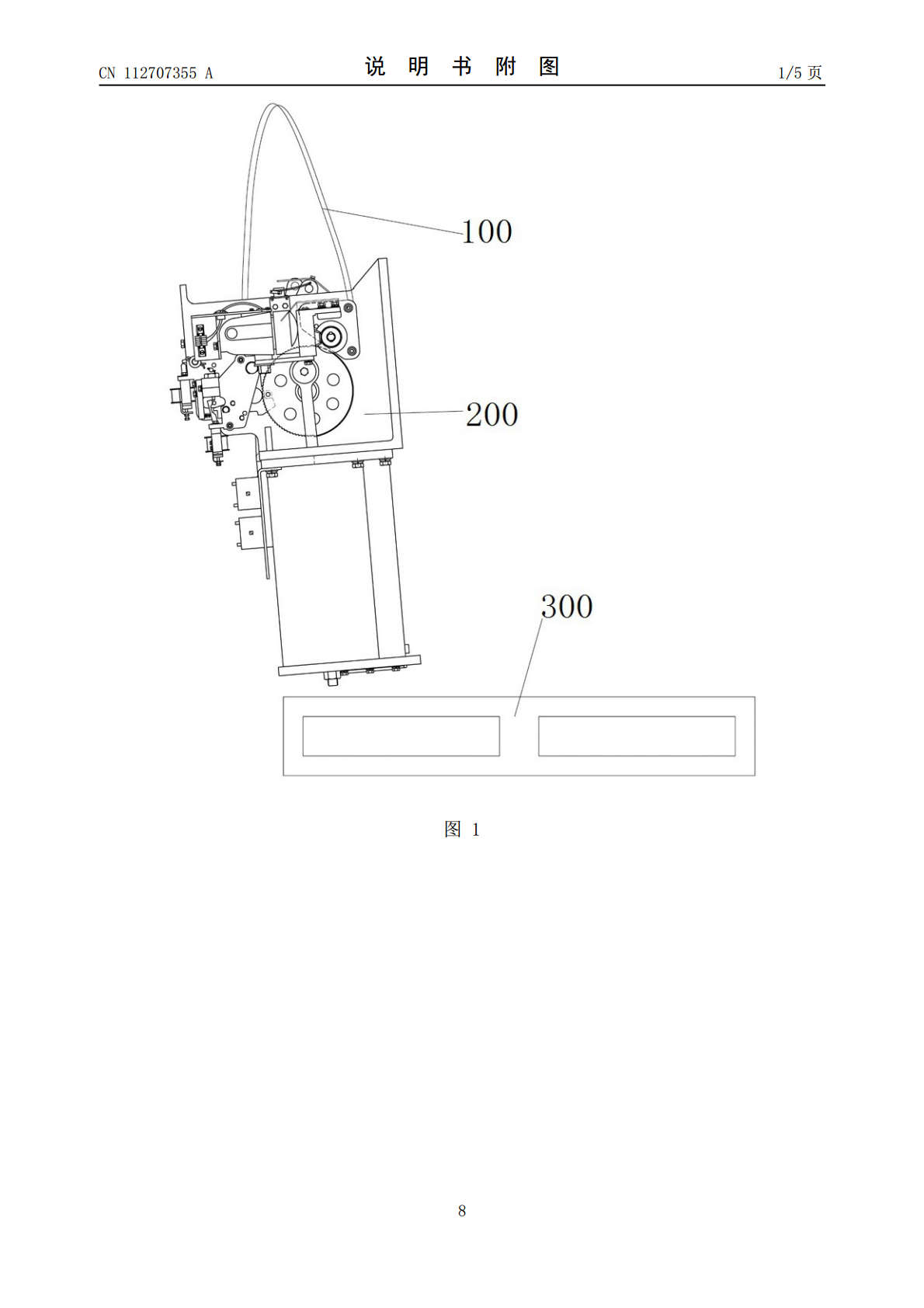
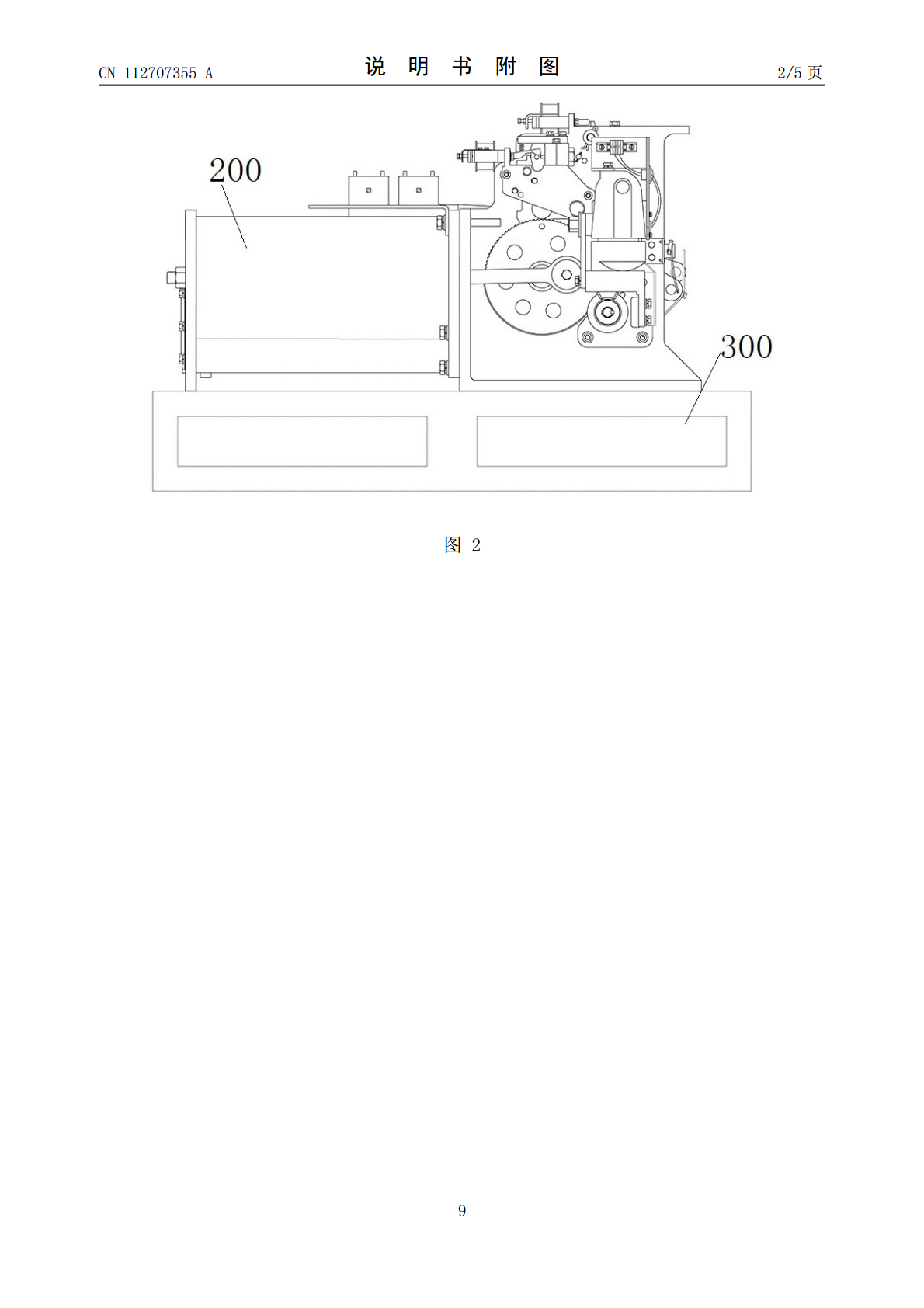
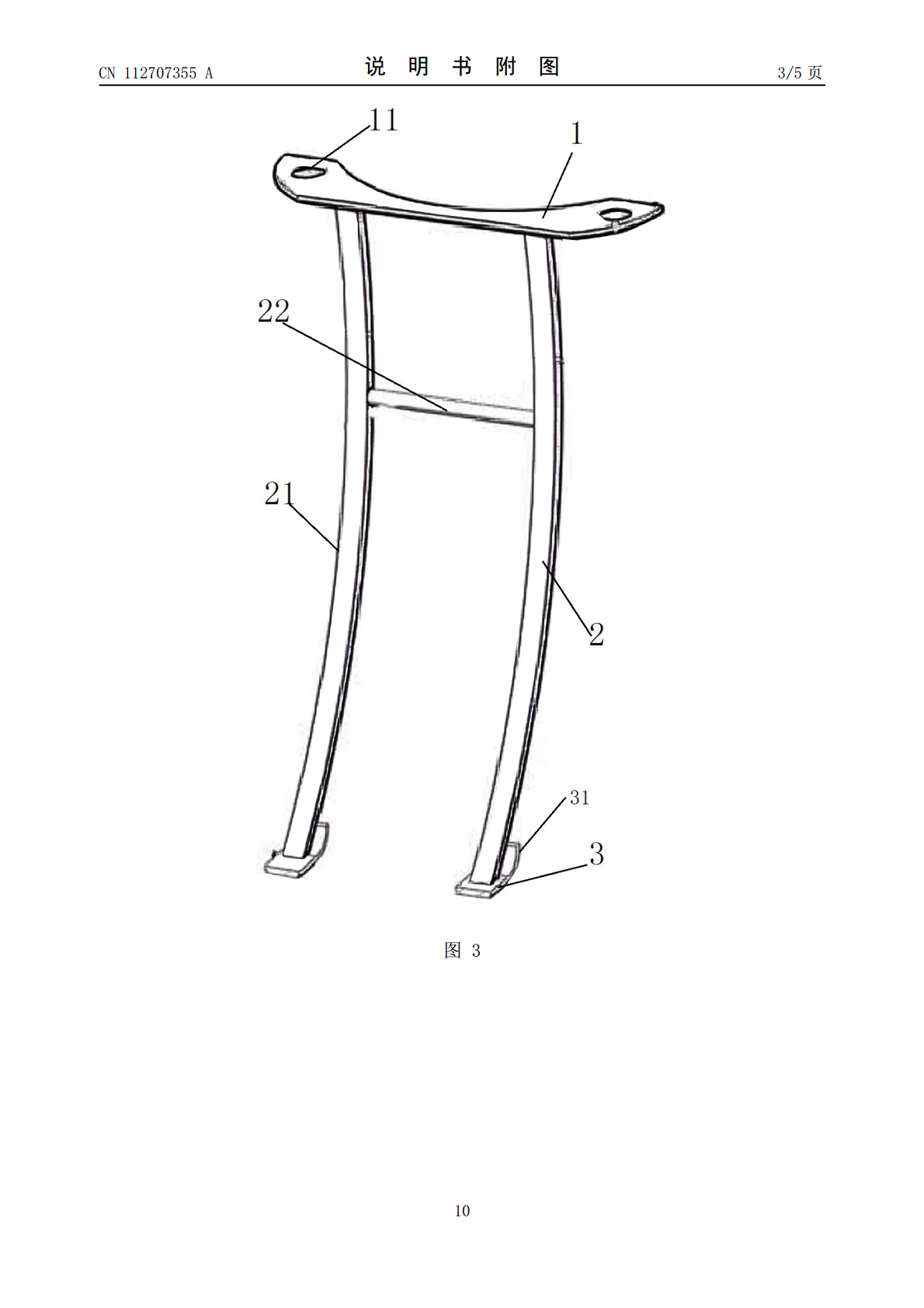
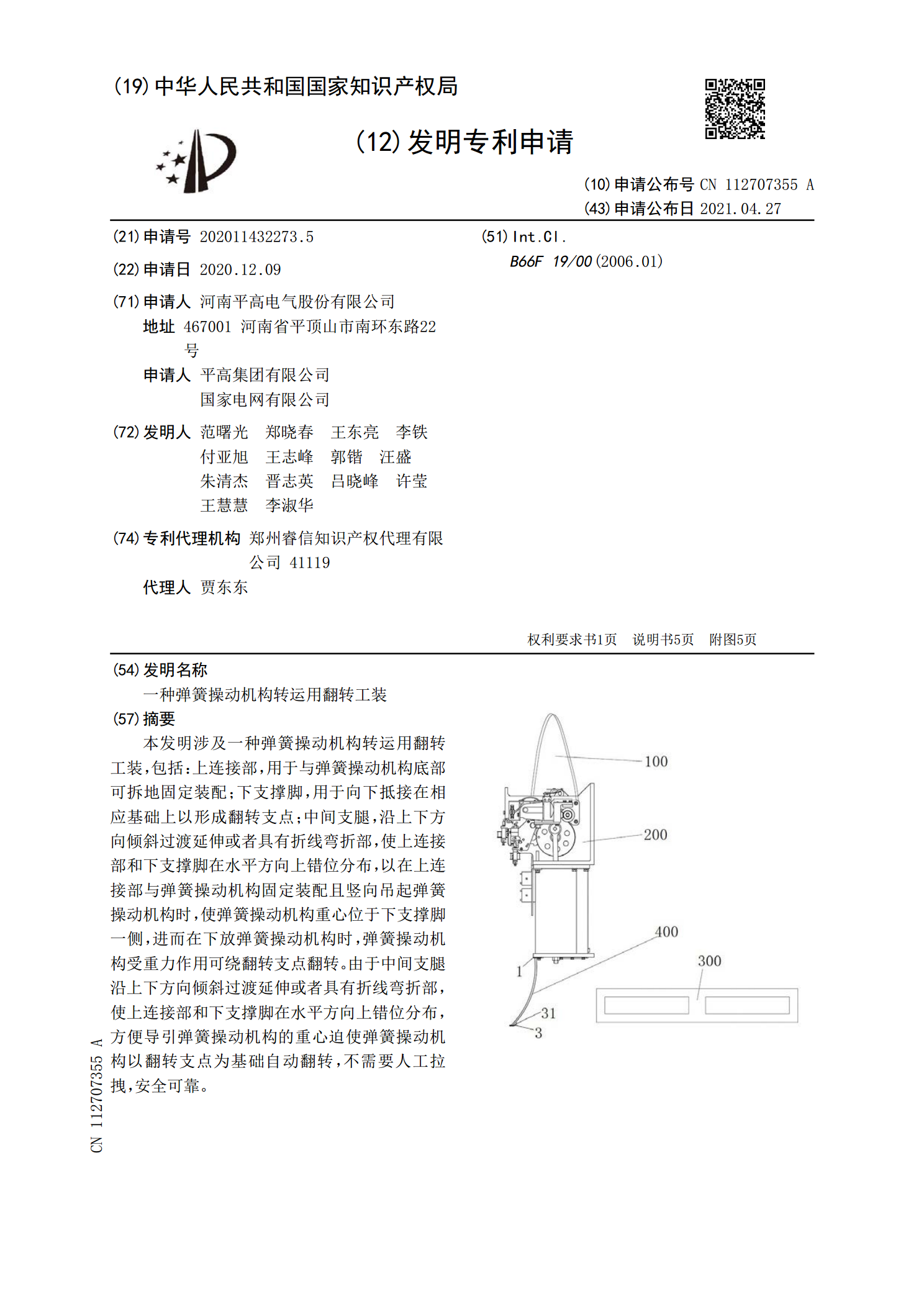
本发明涉及一种弹簧操动机构转运用翻转工装,包括:上连接部,用于与弹簧操动机构底部可拆地固定装配;下支撑脚,用于向下抵接在相应基础上以形成翻转支点;中间支腿,沿上下方向倾斜过渡延伸或者具有折线弯折部,使上连接部和下支撑脚在水平方向上错位分布,以在上连接部与弹簧操动机构固定装配且竖向吊起弹簧操动机构时,使弹簧操动机构重心位于下支撑脚一侧,进而在下放弹簧操动机构时,弹簧操动机构受重力作用可绕翻转支点翻转。由于中间支腿沿上下方向倾斜过渡延伸或者具有折线弯折部,使上连接部和下支撑脚在水平方向上错位分布,方便导引弹簧
一种弹簧操动储能机构.pdf
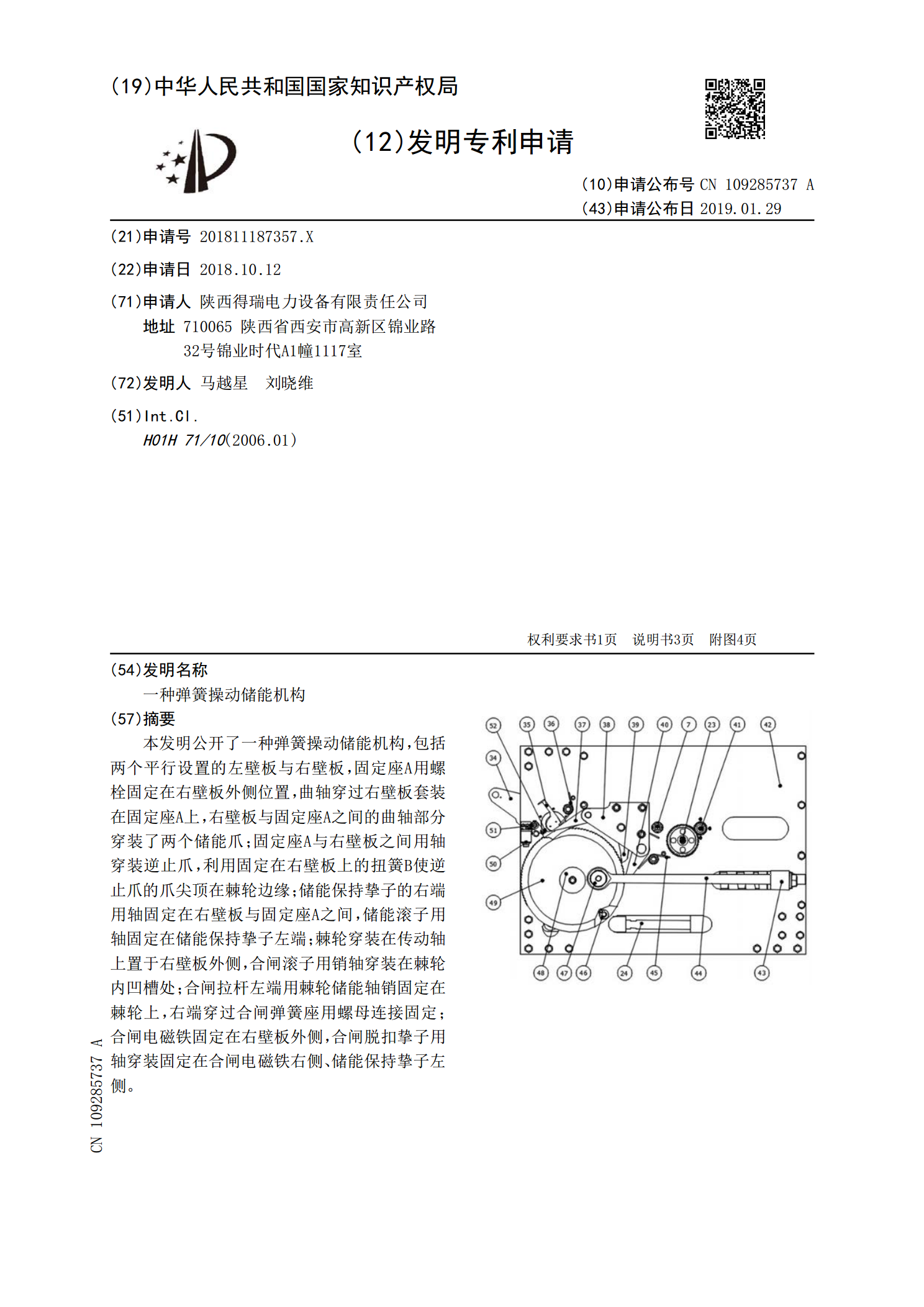
本发明公开了一种弹簧操动储能机构,包括两个平行设置的左壁板与右壁板,固定座A用螺栓固定在右壁板外侧位置,曲轴穿过右壁板套装在固定座A上,右壁板与固定座A之间的曲轴部分穿装了两个储能爪;固定座A与右壁板之间用轴穿装逆止爪,利用固定在右壁板上的扭簧B使逆止爪的爪尖顶在棘轮边缘;储能保持挚子的右端用轴固定在右壁板与固定座A之间,储能滚子用轴固定在储能保持挚子左端;棘轮穿装在传动轴上置于右壁板外侧,合闸滚子用销轴穿装在棘轮内凹槽处;合闸拉杆左端用棘轮储能轴销固定在棘轮上,右端穿过合闸弹簧座用螺母连接固定;合闸电磁

一种弹簧操动机构.pdf
本发明公开了一种弹簧操动机构,该弹簧操动机构中输出轴有两个以上,各个输出轴上分别对应的止旋装配有输出拐臂,各个输出拐臂的自由端分别对应的连接在输出凸轮(E)上开设的滑槽上,各个输出拐臂分别通过对应滑槽与输出凸轮(E)形成摆动导杆机构。从而通过一个输出凸轮驱动两个以上的输出轴动作,而各个输出轴会带动各自对应的隔离开关或断路器设备分合动作。同时,输出凸轮上的滑槽使得输出轴上偏心止旋装配的输出拐臂与输出凸轮形成摆杆导向机构,各个摆杆导向机构会保证输出凸轮向输出拐臂上可靠的传递扭矩,以通过巧妙的连杆传动机构来实现
一种弹簧操动机构.pdf
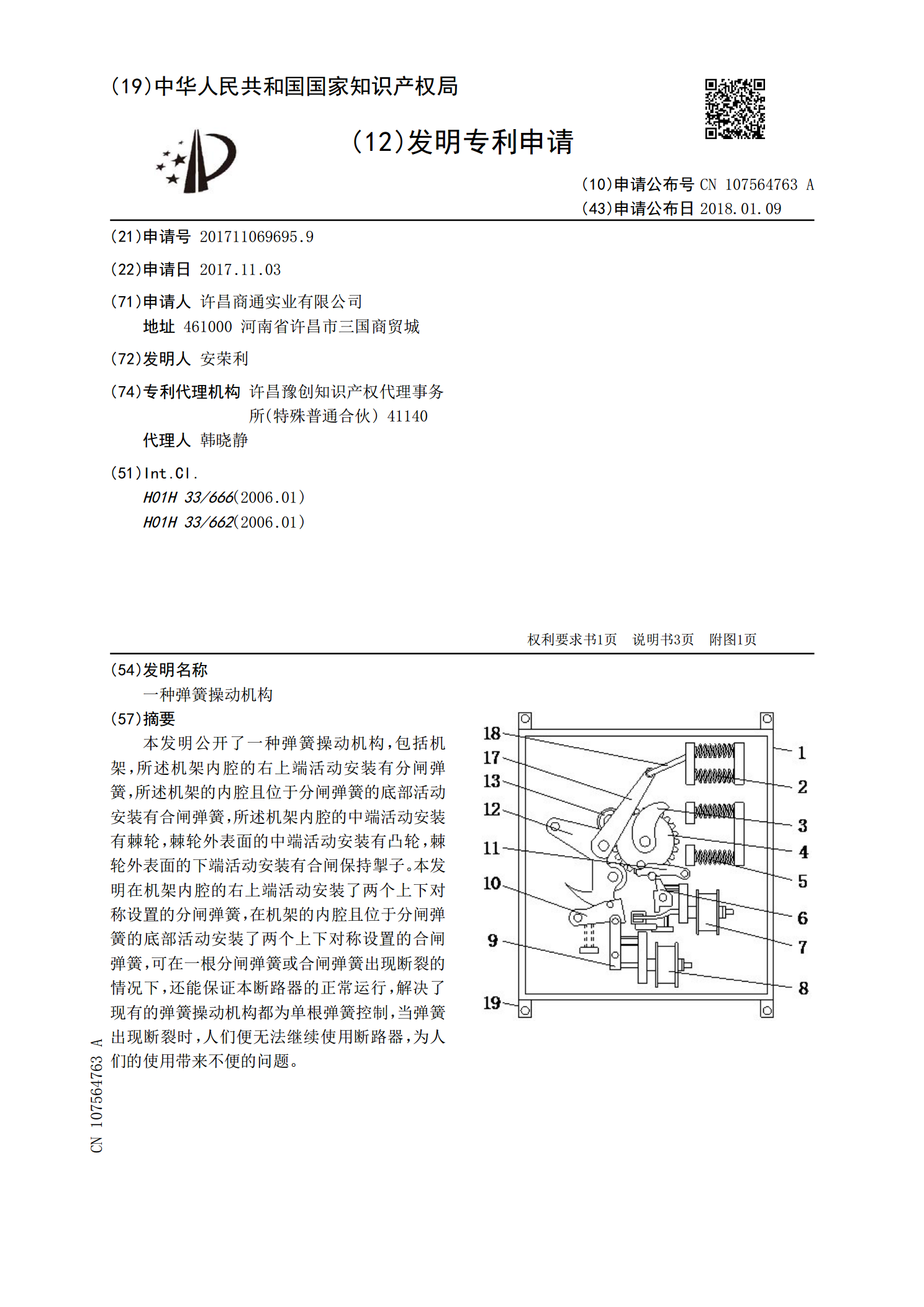
本发明公开了一种弹簧操动机构,包括机架,所述机架内腔的右上端活动安装有分闸弹簧,所述机架的内腔且位于分闸弹簧的底部活动安装有合闸弹簧,所述机架内腔的中端活动安装有棘轮,棘轮外表面的中端活动安装有凸轮,棘轮外表面的下端活动安装有合闸保持掣子。本发明在机架内腔的右上端活动安装了两个上下对称设置的分闸弹簧,在机架的内腔且位于分闸弹簧的底部活动安装了两个上下对称设置的合闸弹簧,可在一根分闸弹簧或合闸弹簧出现断裂的情况下,还能保证本断路器的正常运行,解决了现有的弹簧操动机构都为单根弹簧控制,当弹簧出现断裂时,人们便

一种弹簧操动机构.pdf
本发明公开了一种弹簧操动机构,弹簧操动机构包括机架、传动拐臂、合闸凸轮,机架上设有相互独立设置的分闸缓冲器、合闸缓冲器,分闸缓冲器包括分闸缸体、分闸活塞杆,分闸活塞杆上设有用于与传动拐臂铰接连接的铰接长孔,合闸缓冲器包括合闸缸体、合闸活塞杆,合闸活塞杆上设有用于与合闸凸轮在合闸操作时滚动配合的滚轮,在合闸前期、中期,滚轮与合闸凸轮的同心部滚动配合,在合闸后期,滚轮与合闸凸轮的偏心部滚动配合。将分闸缓冲器、合闸缓冲器相互独立设置,相对于集成的缓冲器,加工制造容易、安装调试方便有利于对缓冲器的缓冲性能进行调试