
基于阴影法的微悬臂梁标定装置与方法.pdf

春岚****23


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于阴影法的微悬臂梁标定装置与方法.pdf
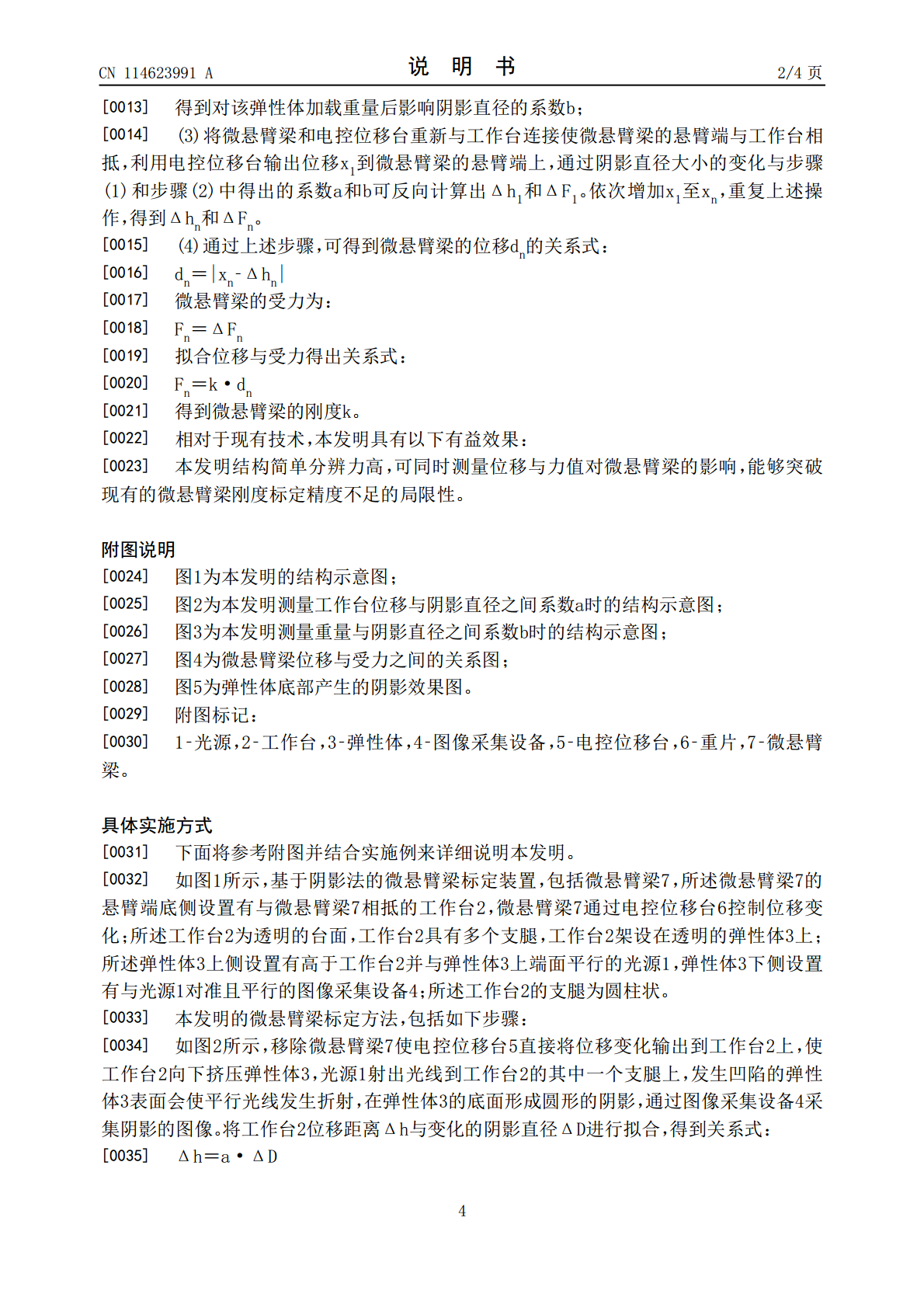
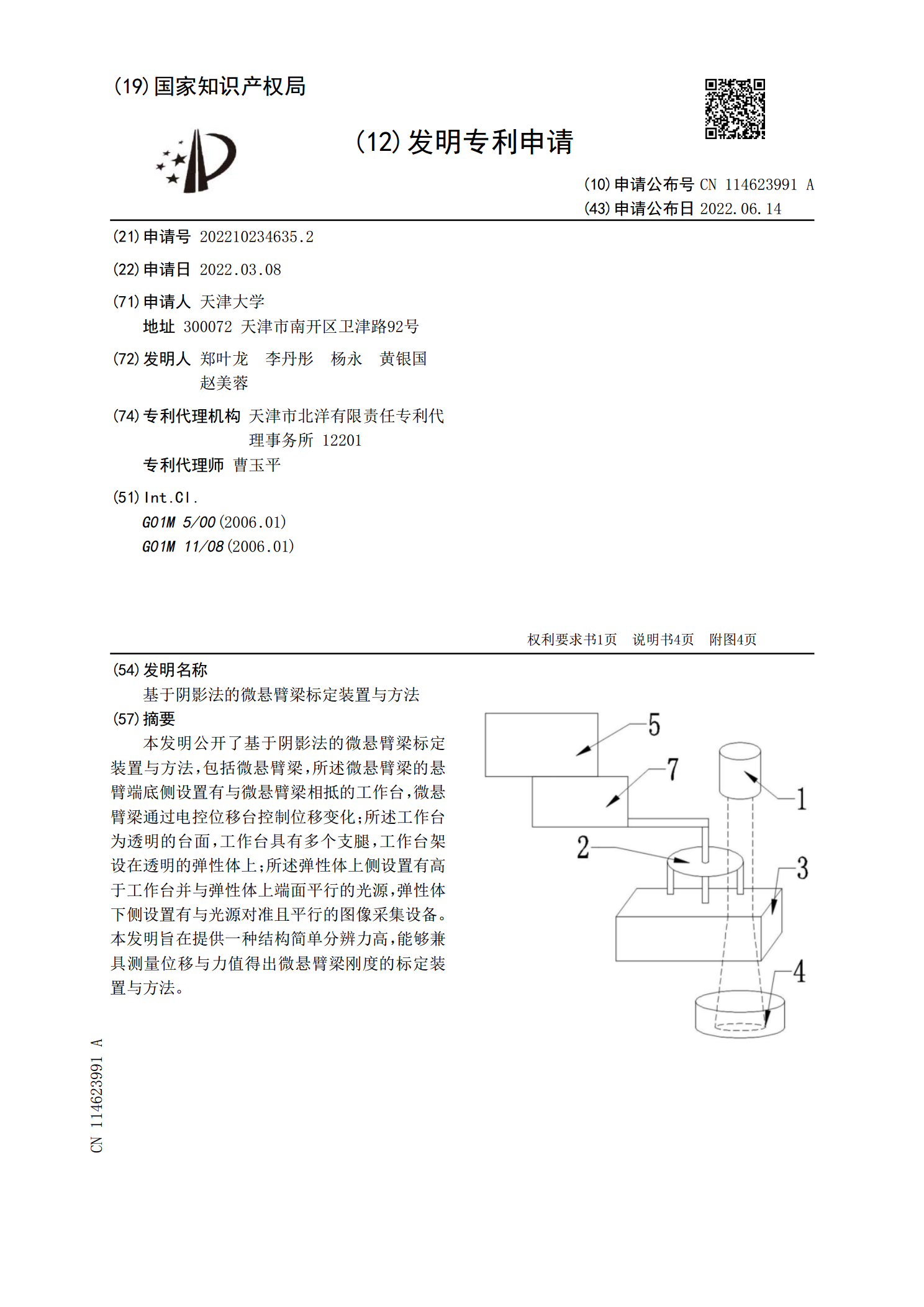
本发明公开了基于阴影法的微悬臂梁标定装置与方法,包括微悬臂梁,所述微悬臂梁的悬臂端底侧设置有与微悬臂梁相抵的工作台,微悬臂梁通过电控位移台控制位移变化;所述工作台为透明的台面,工作台具有多个支腿,工作台架设在透明的弹性体上;所述弹性体上侧设置有高于工作台并与弹性体上端面平行的光源,弹性体下侧设置有与光源对准且平行的图像采集设备。本发明旨在提供一种结构简单分辨力高,能够兼具测量位移与力值得出微悬臂梁刚度的标定装置与方法。

基于静电力的可溯源微悬臂梁刚度标定方法.docx
基于静电力的可溯源微悬臂梁刚度标定方法基于静电力的可溯源微悬臂梁刚度标定方法摘要:随着微纳尺度尺寸的器件的发展,微悬臂梁在纳米力学测量领域得到了广泛应用。准确的刚度标定是保证测量结果可信度和准确性的关键。本论文提出了一种基于静电力的可溯源微悬臂梁刚度标定方法。该方法能够实现高精度的刚度标定,同时能够追溯到标定装置的具体参数,提高了刚度标定的可信度和溯源性。首先介绍了微悬臂梁的基本结构和原理,然后详细描述了静电力的作用原理和刚度标定方法。通过对实验结果的分析和讨论,验证了本方法的有效性和可行性。最后,总结了

AFM微悬臂梁法向弹性系数标定技术.docx
AFM微悬臂梁法向弹性系数标定技术摘要:本文介绍了一种用AFM微悬臂梁法标定样品的法向弹性系数的技术。我们首先介绍了当今常用的材料表征技术,然后详细讨论了AFM微悬臂梁法的工作原理和空间解析性。我们进一步介绍了法向弹性系数的基本概念,并讨论了使用AFM微悬臂梁法标定样品法向弹性系数的实验方法和步骤。最后,我们总结了AFM微悬臂梁法的优缺点,并提出了未来研究方向。引言:当今许多工程应用需要对材料进行表征以了解其物理、化学和力学属性。其中的一项主要任务是确定材料的弹性系数,该参数反映了材料的刚度和变形响应。在

一种基于阴影法的微小位移测量装置及方法.pdf
本发明公开了一种基于阴影法的微小位移测量装置及方法,包括测量系统和电控位移台,测量系统包括粘弹性胶体、工作台、平行光源、图像传感器,待测位移施加在工作台上,粘弹性胶体与圆柱支撑杆接触的表面发生凹陷,平行光源出射圆形光斑到工作台的其中任意一个圆柱支撑杆上,发生凹陷的粘弹性胶体的表面使平行光线发生折射并在粘弹性胶体的下方形成阴影,通过图像传感器采集阴影的图像,从而通过未施加待测位移之前所形成的阴影直径和施加待测位移之后所形成的阴影直径的变化获得待测位移;电控位移台用于对工作台施加标定位移,用以获得工作台的位移

微悬臂梁高阶弹性常数标定方法的研究的开题报告.docx
微悬臂梁高阶弹性常数标定方法的研究的开题报告摘要:微悬臂梁广泛应用于微机电系统中,其高阶弹性常数标定方法对微机电系统的可靠性和精度有着重要影响。本文旨在研究微悬臂梁高阶弹性常数标定方法,提出一种简单可行的标定方法,进一步提高微机电系统的可靠性和精度。一、研究背景微机电系统(MEMS)是近年来快速发展的一种微小化、集成化、多功能化的技术,其应用领域涉及生物医学、环境保护、汽车工业、航空航天等方面。其中,微悬臂梁作为MEMS中的重要部件,被广泛应用于力学、电学、光学等领域。为了保证微悬臂梁的可靠性和精度,需要