
视频监控多视角车辆检测方法和装置.pdf

书生****12

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
视频监控多视角车辆检测方法和装置.pdf
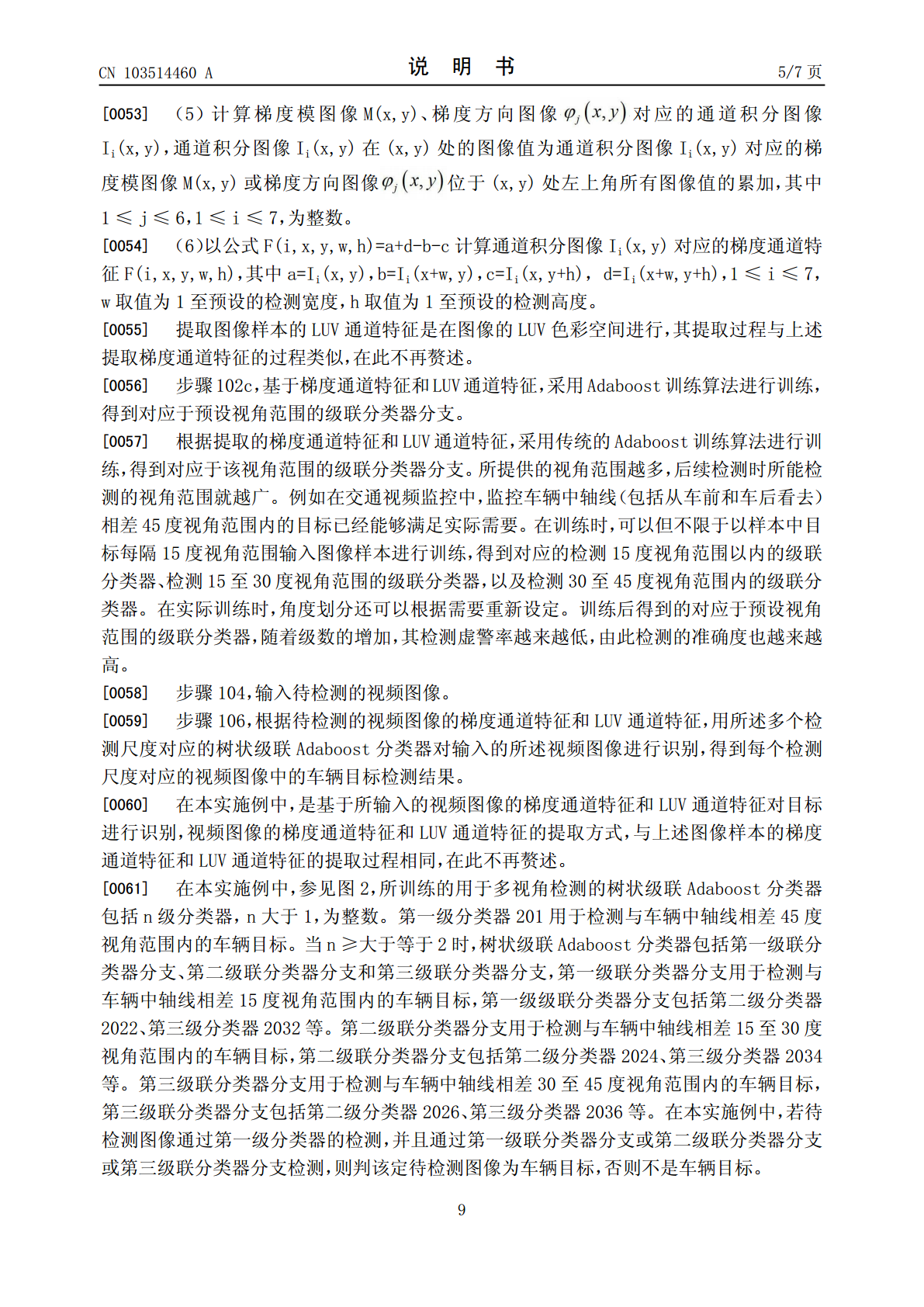
本发明公开了一种视频监控多视角车辆检测方法和装置,所述方法包括:基于图像样本的梯度通道特征和LUV通道特征,通过Adaboost训练算法进行训练,得到多个检测尺度对应的树状级联Adaboost分类器,所述树状级联Adaboost分类器包括多个级联分类器分支,每一级联分类器分支用于检测图像中预设视角范围内的车辆目标;输入待检测的视频图像;根据待检测的视频图像的梯度通道特征和LUV通道特征,用所述多个检测尺度对应的树状级联Adaboost分类器对输入的所述视频图像进行识别,得到每个检测尺度对应的视频图像中的车
视频监控装置和监控方法.pdf
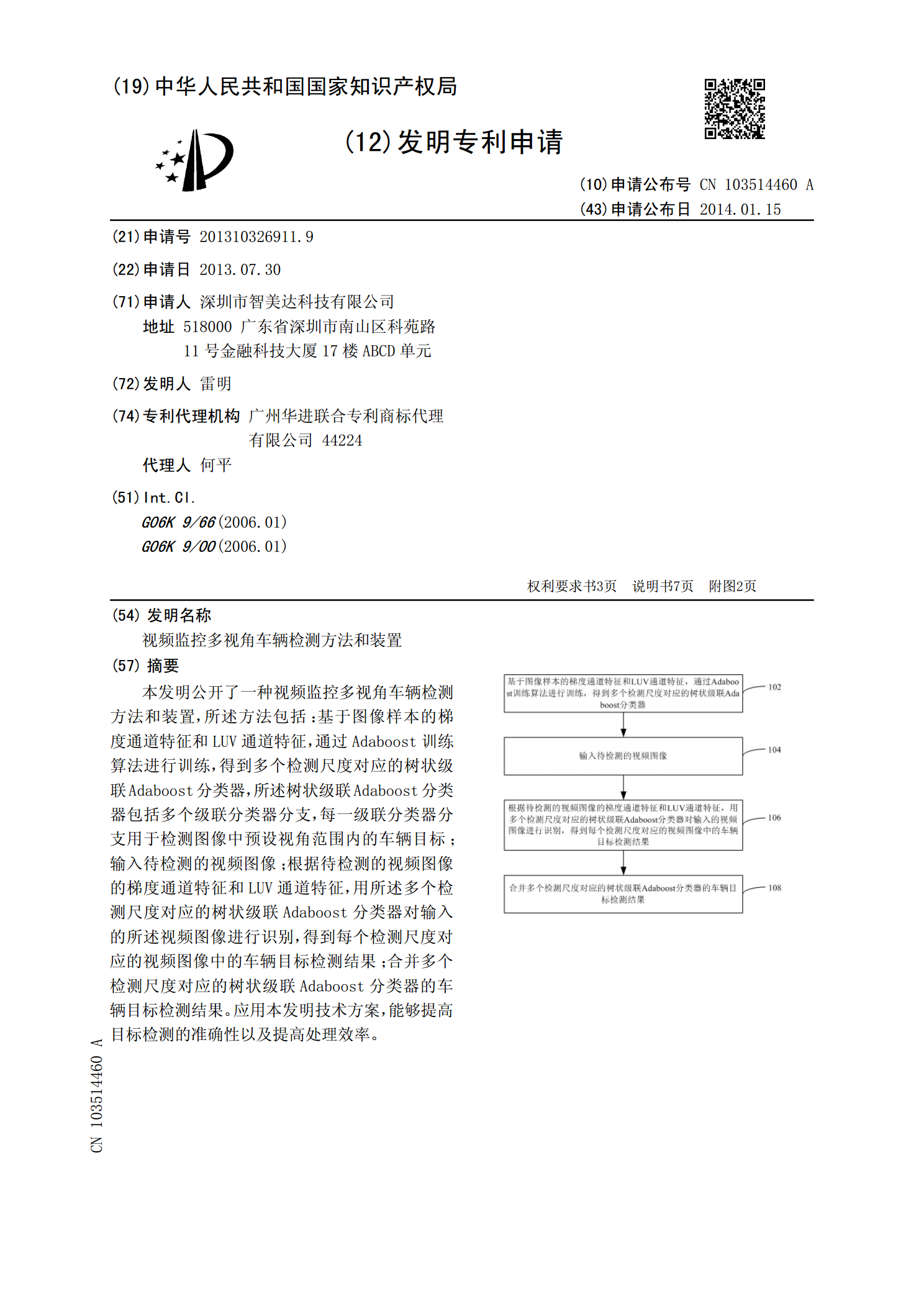
本发明涉及监控设备优化,公开了一种视频监控装置,该视频监控装置包括:摄像装置(1),用于拍摄视频图像;以及处理装置(2),与所述摄像装置(1)连接,用于对来自所述摄像装置(1)的视频图像进行处理分析以便通过判断灰度值的变化来进行报警。本发明提供的视频监控装置和视频监控方法可以应用到移动设备中,简单便携易于使用。
视频监控系统故障检测方法和装置.pdf
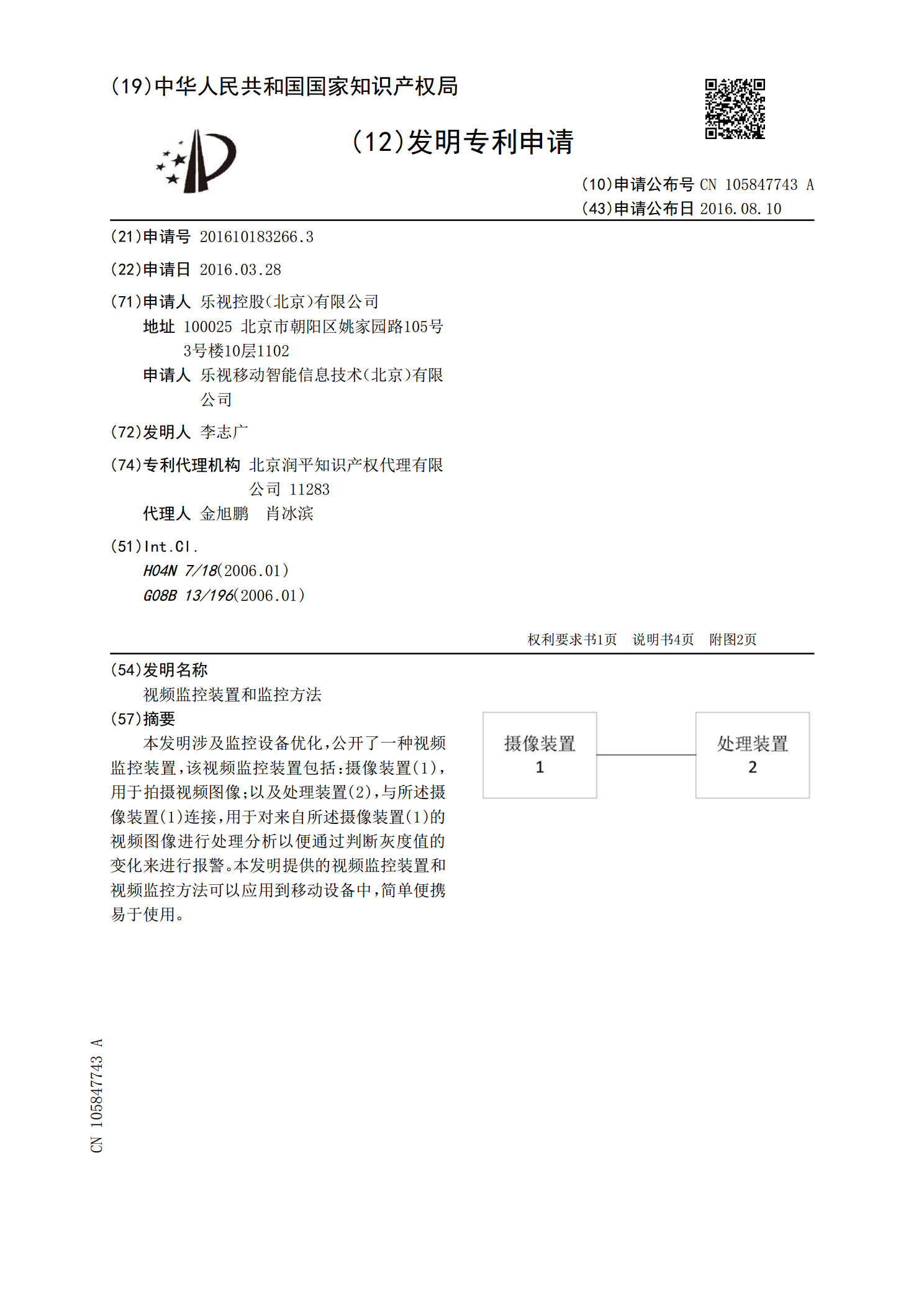
本发明公开了一种视频监控系统故障检测装置,包括多个运维监控箱,将视频监控系统内的摄像机划分为多个区域,多个区域的摄像机与多个运维监控箱一一对应,每个运维监控箱包括:箱体,其内设置自动灭火模块;第一温度传感器,用于检测箱体内的温度数据;烟雾传感器,用于检测箱体内的烟雾数据;控制模块,控制模块与对应区域内摄像机、第一温度传感器、烟雾传感器、自动灭火模块连接,用于接收并判断烟雾数据是否大于烟雾阈值,若是,启动自动灭火模块,若否,接收并判断温度数据是否大于温度阈值,若是,启动自动灭火模块。本发明具有对于大范围视频

车辆及车辆的防盗监控方法和装置.pdf
本发明公开了一种车辆的防盗监控方法,包括以下步骤:在车辆的任一车门打开时,唤醒车辆的车载娱乐系统;车载娱乐系统判断第一预设时间内是否存在解锁发动机的操作;如果判断第一预设时间内未存在解锁发动机的操作,车载娱乐系统激活车辆内的摄像装置以拍摄车辆内的影像信息;车载娱乐系统获取车辆内的影像信息,并将车辆内的影像信息无线传输给汽车远程服务提供商TSP后台;TSP后台将车辆内的影像信息推送给车辆的用户终端。该监控方法能够在车辆被盗的第一时间内获得可疑人员的影像信息,并通过密码控制车辆的发动机以确保可疑人员无法启动该

用于视频监控的方法和装置.pdf
本公开的实施例提供一种用于视频监控的方法和装置。该方法包括:经由无线链路接收来自移动设备的视频数据传输请求;响应于所述视频数据传输请求而将所述移动设备注册成为所述视频监控系统的临时监控设备,建立与所述移动设备的无线连接,并经由所述无线连接从所述移动设备接收视频数据;以及对所述视频数据进行处理和存储。根据本公开的实施例的方法或装置,能够根据需要使移动设备临时加入视频监控系统,可以例如对现有的视频监控系统进行补充和增强。