
一种针对电动汽车稳定系统执行器故障的容错控制方法.pdf

秀华****魔王


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共40页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种针对电动汽车稳定系统执行器故障的容错控制方法.pdf
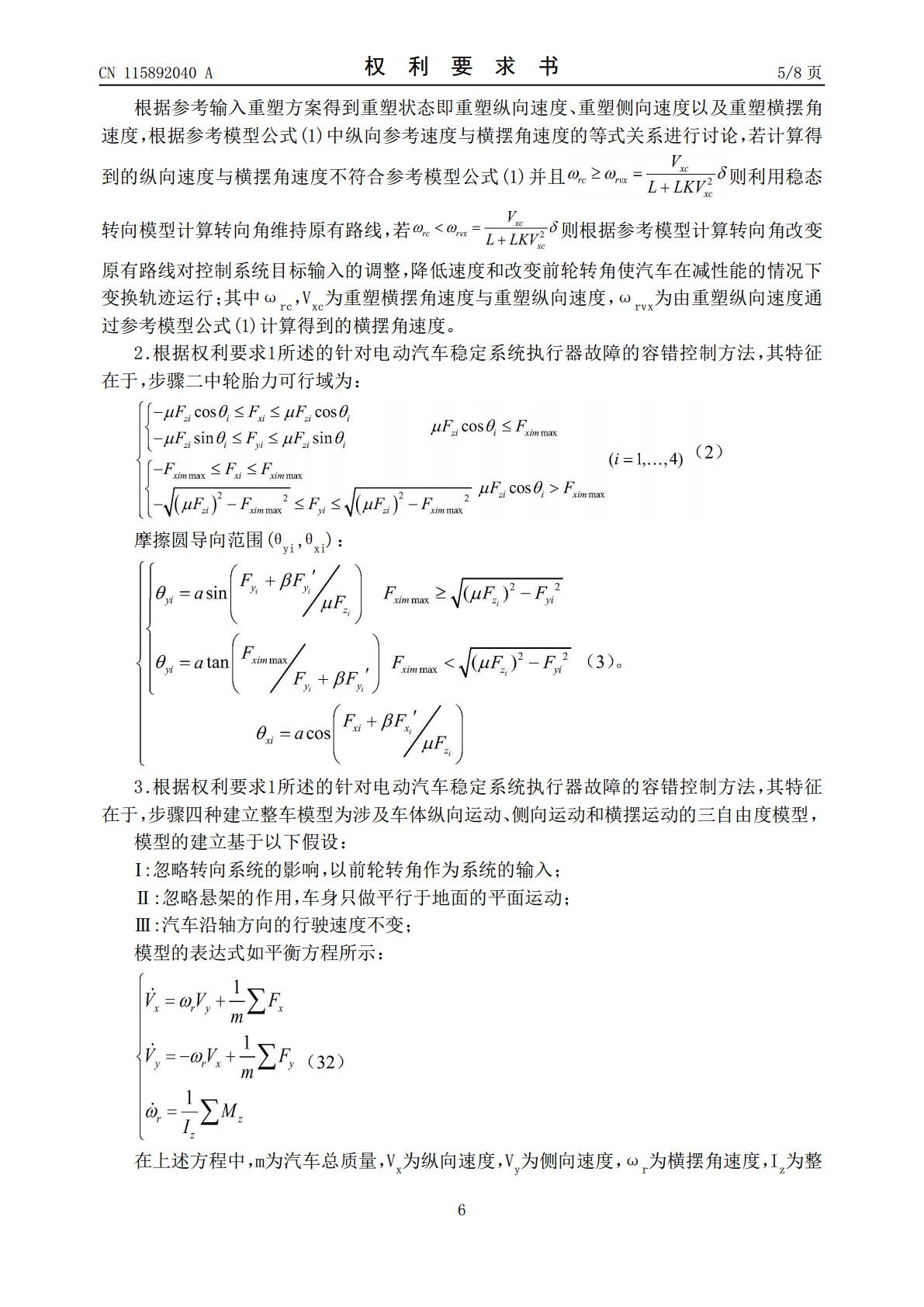
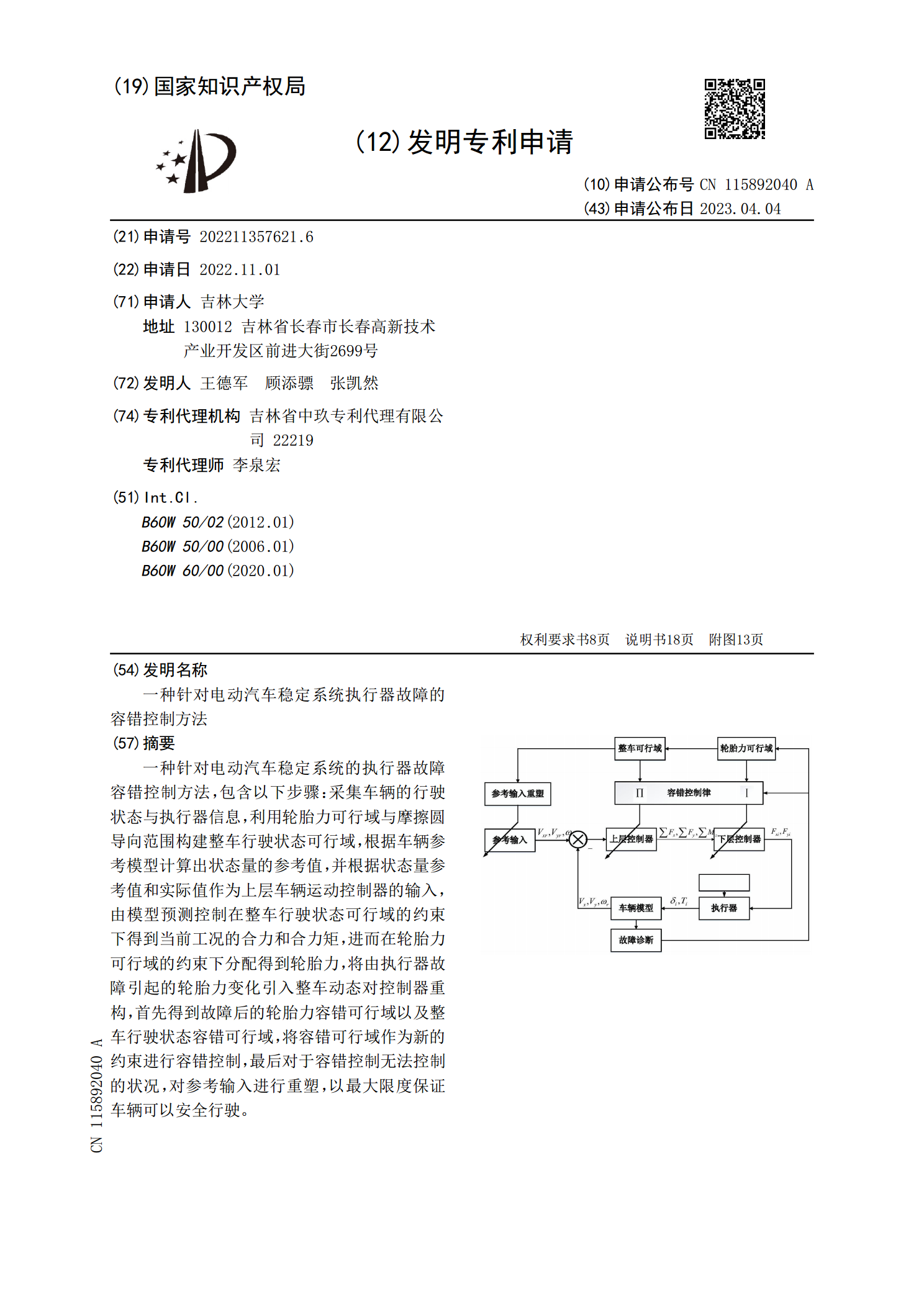
一种针对电动汽车稳定系统的执行器故障容错控制方法,包含以下步骤:采集车辆的行驶状态与执行器信息,利用轮胎力可行域与摩擦圆导向范围构建整车行驶状态可行域,根据车辆参考模型计算出状态量的参考值,并根据状态量参考值和实际值作为上层车辆运动控制器的输入,由模型预测控制在整车行驶状态可行域的约束下得到当前工况的合力和合力矩,进而在轮胎力可行域的约束下分配得到轮胎力,将由执行器故障引起的轮胎力变化引入整车动态对控制器重构,首先得到故障后的轮胎力容错可行域以及整车行驶状态容错可行域,将容错可行域作为新的约束进行容错控制
一种针对车辆稳定系统执行器故障的容错控制方法.pdf
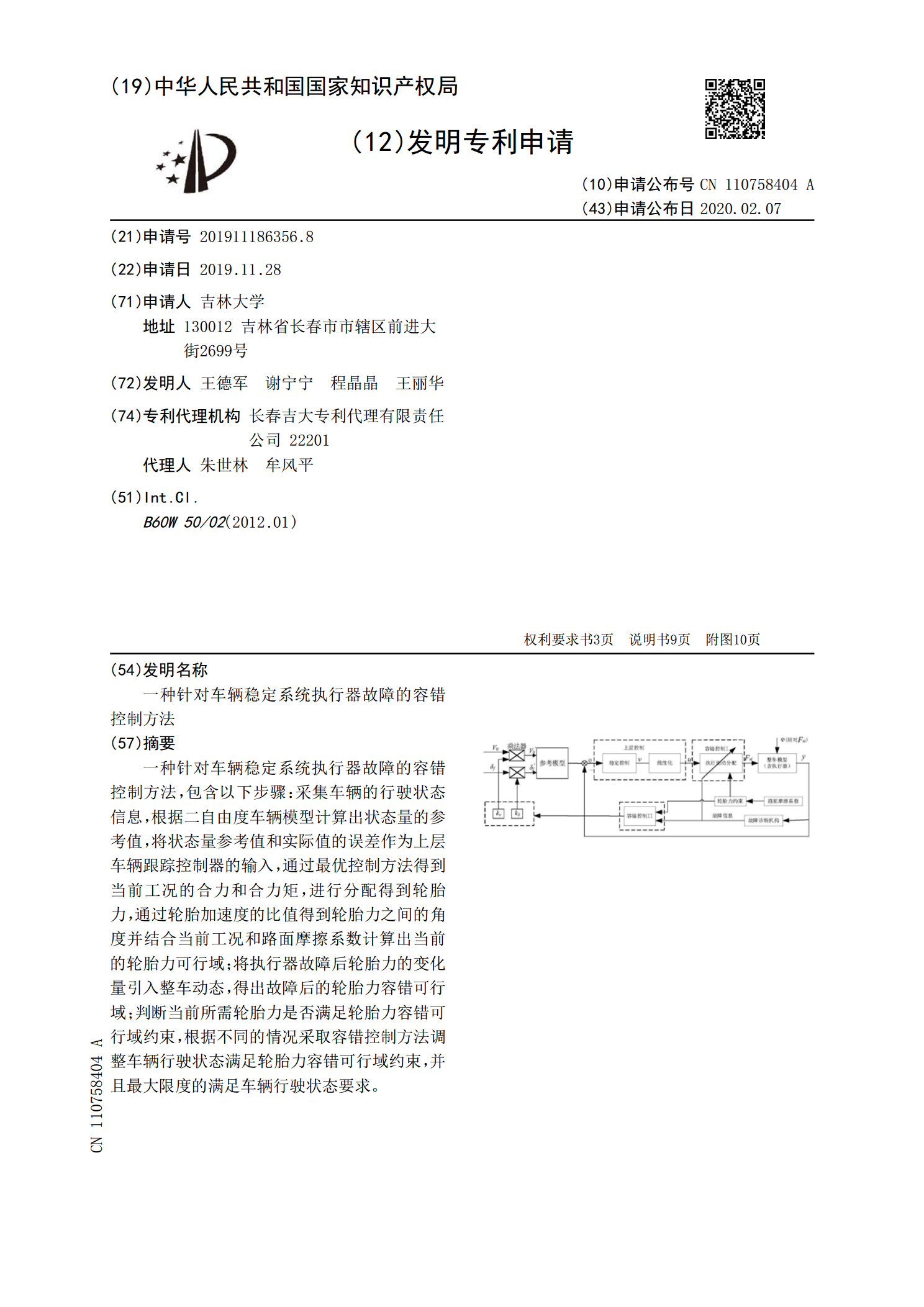
一种针对车辆稳定系统执行器故障的容错控制方法,包含以下步骤:采集车辆的行驶状态信息,根据二自由度车辆模型计算出状态量的参考值,将状态量参考值和实际值的误差作为上层车辆跟踪控制器的输入,通过最优控制方法得到当前工况的合力和合力矩,进行分配得到轮胎力,通过轮胎加速度的比值得到轮胎力之间的角度并结合当前工况和路面摩擦系数计算出当前的轮胎力可行域;将执行器故障后轮胎力的变化量引入整车动态,得出故障后的轮胎力容错可行域;判断当前所需轮胎力是否满足轮胎力容错可行域约束,根据不同的情况采取容错控制方法调整车辆行驶状态满

一种面向执行器故障的四旋翼混合容错控制方法及系统.pdf
本发明提出了一种面向执行器故障的四旋翼混合容错控制方法及系统,包括对四旋翼飞行器结构框架和数学控制模型的分析与建模,并提出了基于双闭环控制回路的飞行控制结构;采用基于PID模型算法的位置控制和基于自适应混合控制器的姿态控制进行容错控制;姿态控制将基于学习的数据驱动方法与PID控制算法结合。本发明为提高控制策略的鲁棒性,考虑执行器故障情况,将RL与经典模型PID控制算法结合,借助姿态控制中的鲁棒学习算法,可以自适应估计不确定参数,而无需了解细节故障信息,为故障下的动态系统设计更鲁棒的容错控制器。位置控制和姿
一种面向执行器故障的无人机轨迹容错控制方法及系统.pdf
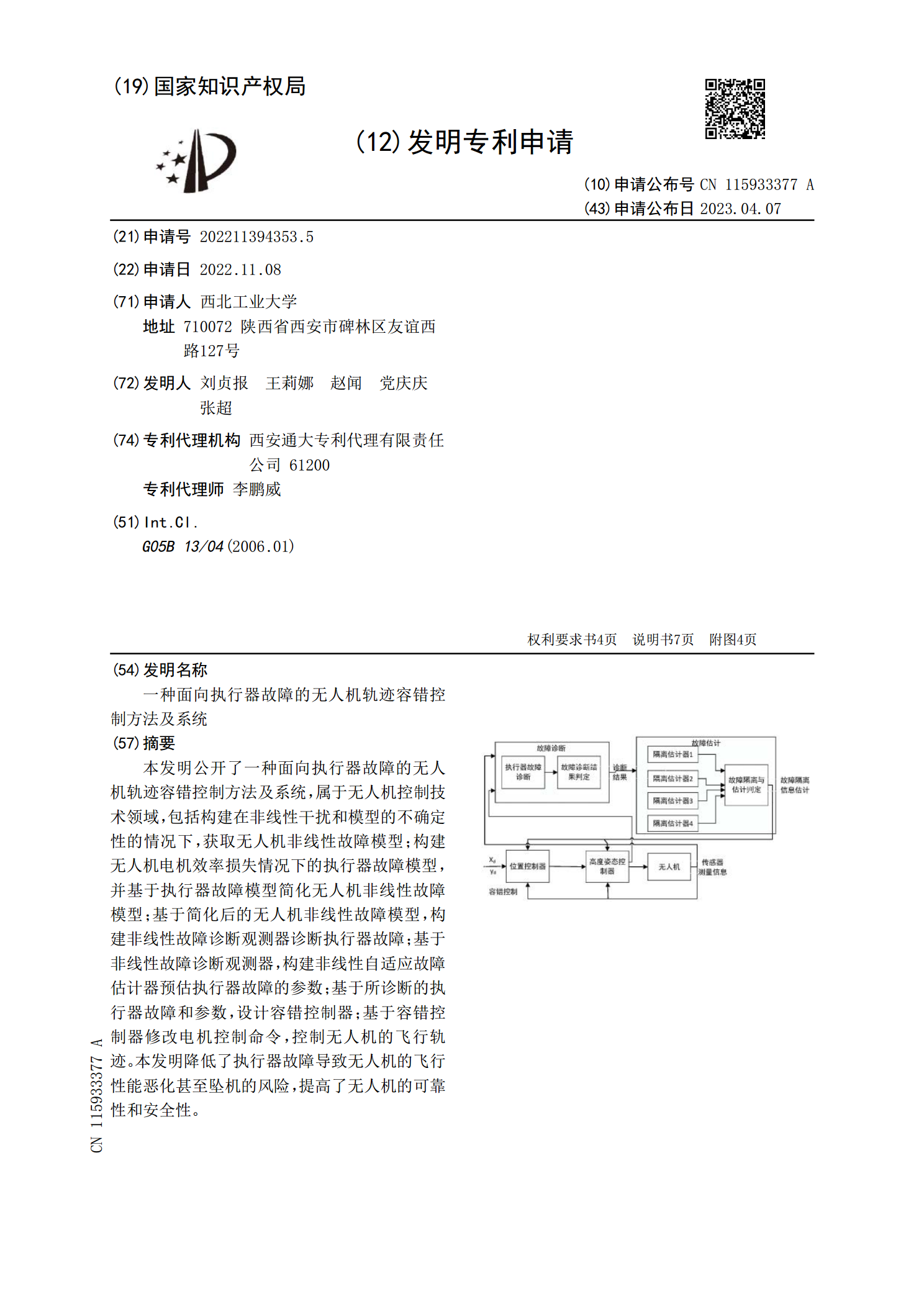
本发明公开了一种面向执行器故障的无人机轨迹容错控制方法及系统,属于无人机控制技术领域,包括构建在非线性干扰和模型的不确定性的情况下,获取无人机非线性故障模型;构建无人机电机效率损失情况下的执行器故障模型,并基于执行器故障模型简化无人机非线性故障模型;基于简化后的无人机非线性故障模型,构建非线性故障诊断观测器诊断执行器故障;基于非线性故障诊断观测器,构建非线性自适应故障估计器预估执行器故障的参数;基于所诊断的执行器故障和参数,设计容错控制器;基于容错控制器修改电机控制命令,控制无人机的飞行轨迹。本发明降低了
一种针对汽车线控制动失效故障的容错控制系统及控制方法.pdf
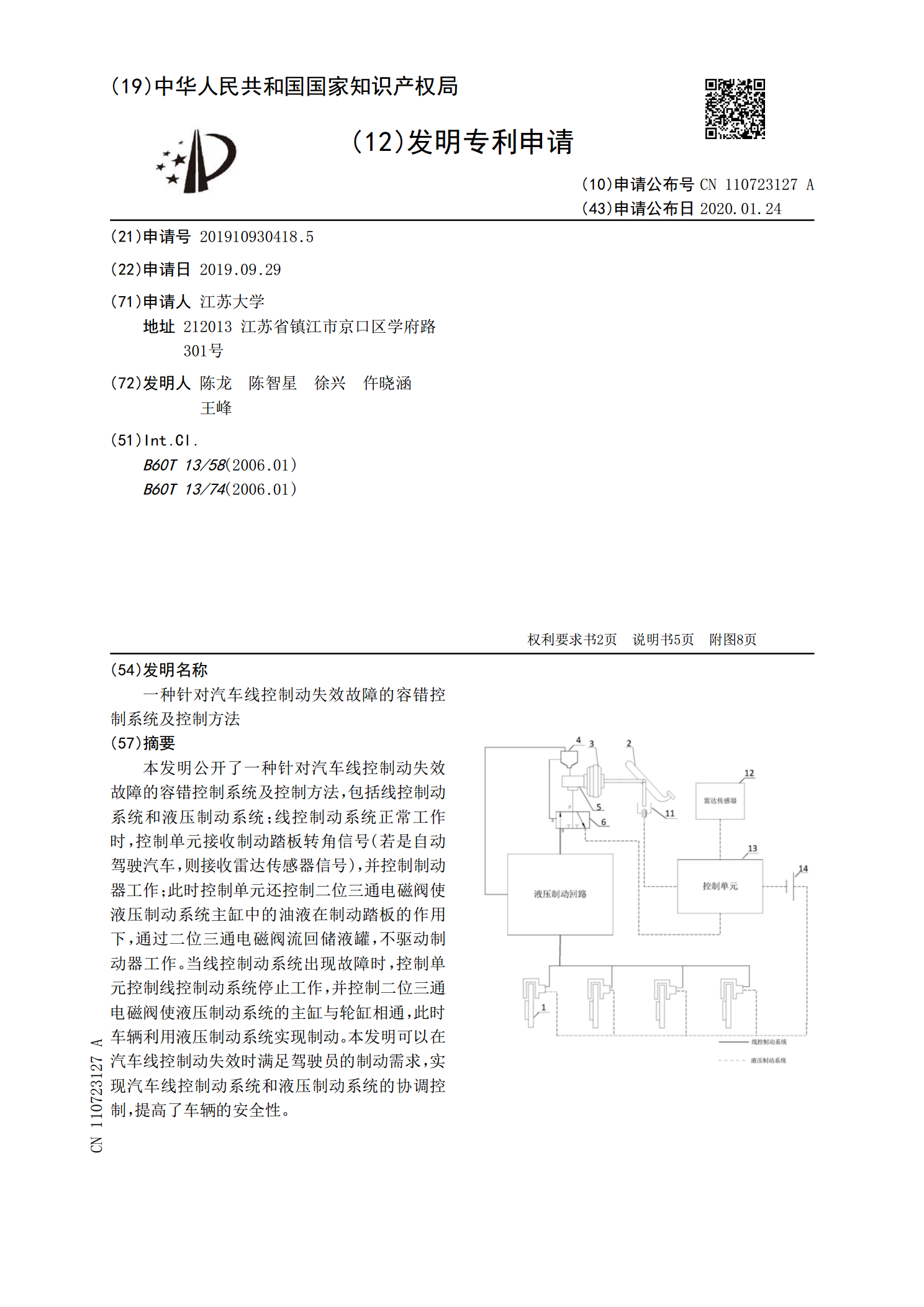
本发明公开了一种针对汽车线控制动失效故障的容错控制系统及控制方法,包括线控制动系统和液压制动系统;线控制动系统正常工作时,控制单元接收制动踏板转角信号(若是自动驾驶汽车,则接收雷达传感器信号),并控制制动器工作;此时控制单元还控制二位三通电磁阀使液压制动系统主缸中的油液在制动踏板的作用下,通过二位三通电磁阀流回储液罐,不驱动制动器工作。当线控制动系统出现故障时,控制单元控制线控制动系统停止工作,并控制二位三通电磁阀使液压制动系统的主缸与轮缸相通,此时车辆利用液压制动系统实现制动。本发明可以在汽车线控制动失