
由GTO至日地共线平动点的转移轨道设计方法、装置及介质.pdf

文光****iu


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
由GTO至日地共线平动点的转移轨道设计方法、装置及介质.pdf
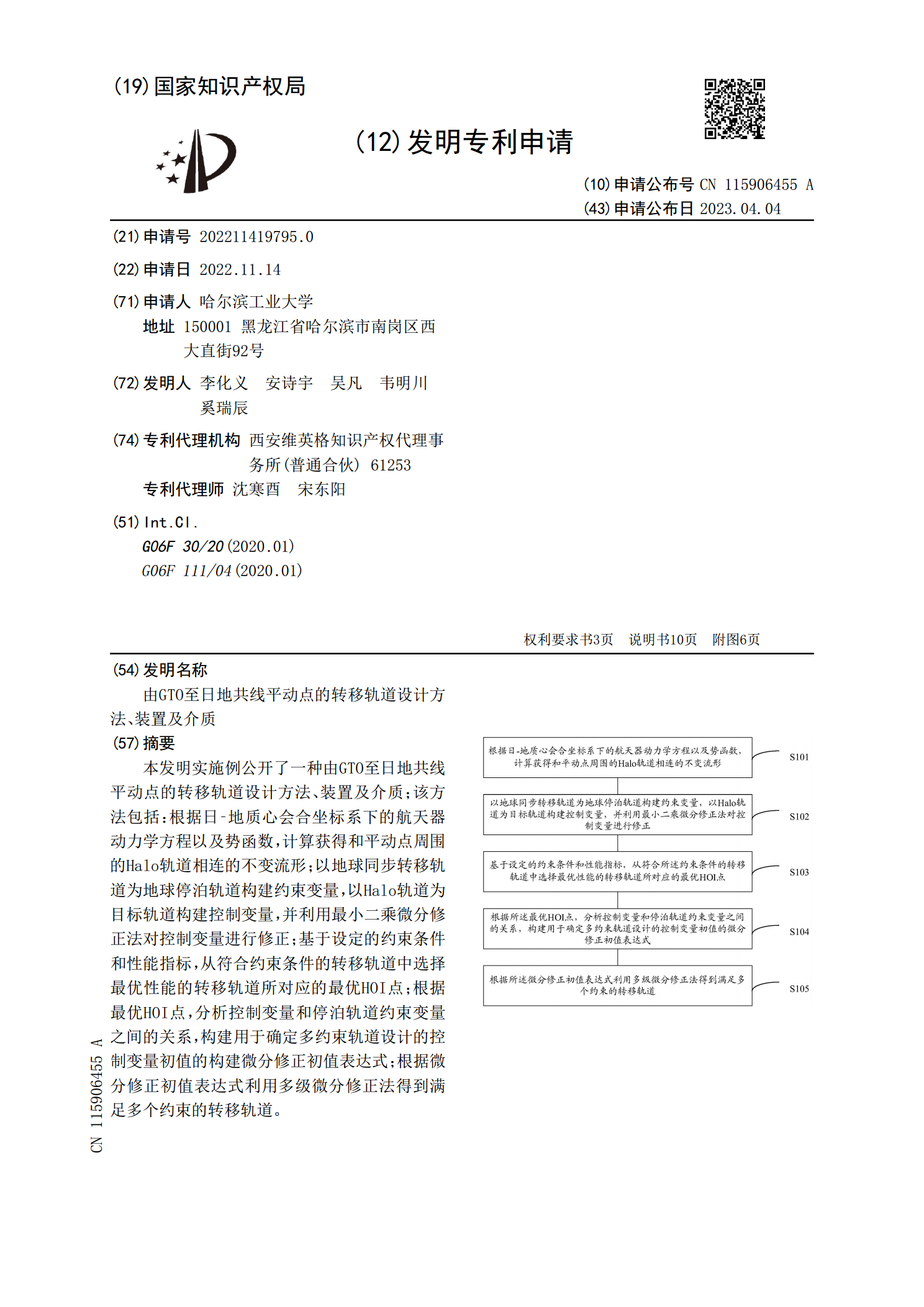
本发明实施例公开了一种由GTO至日地共线平动点的转移轨道设计方法、装置及介质;该方法包括:根据日‑地质心会合坐标系下的航天器动力学方程以及势函数,计算获得和平动点周围的Halo轨道相连的不变流形;以地球同步转移轨道为地球停泊轨道构建约束变量,以Halo轨道为目标轨道构建控制变量,并利用最小二乘微分修正法对控制变量进行修正;基于设定的约束条件和性能指标,从符合约束条件的转移轨道中选择最优性能的转移轨道所对应的最优HOI点;根据最优HOI点,分析控制变量和停泊轨道约束变量之间的关系,构建用于确定多约束轨道设计

从地球到日-火系平动点轨道的转移.pdf

基于流形插入的日地系Halo轨道转移轨道设计.docx
基于流形插入的日地系Halo轨道转移轨道设计日地系的Halo轨道,又称为Lissajous轨道,是一种时常被用于任务设计的特殊轨道。它在三维空间中呈现出类似固定图形、能够利用太阳引力、地球引力和其他天体引力共同维持的关联状态,使它非常有价值。在此基础上,如果能够将流形插入技术应用于Halo轨道的转移轨道设计,在轨道转移的过程中很可能会获得更加精确和有效的转移结果。因此,本文研究流形插入技术和日地系Halo轨道转移轨道设计,以期在日后的航空航天领域发挥重要作用。首先,我们需要了解Lissajous轨道。Li

基于脉冲星的日地系平动点轨道自主导航研究.docx
基于脉冲星的日地系平动点轨道自主导航研究脉冲星是一种密度极高、自转极快的中子星,它们的旋转周期非常稳定,并且能够以极高的精度发射出脉冲。这种特性赋予脉冲星在天文导航和卫星导航中的应用前景,特别是在利用天体导航进行自主导航方面。本文将探讨基于脉冲星的日地系平动点轨道自主导航的相关研究。一.脉冲星导航的基本原理天文导航利用天体的测量来确定航天器的位置和速度,其最基本的测量形式是根据时间和方向观测天体,从而确定其赤经和赤纬。尽管使用这种方法可以得到很高的精度,但由于天体的位置和速度也会发生变化,因此需要定期进行

嫦娥二号平动点间转移轨道方案研究.docx
嫦娥二号平动点间转移轨道方案研究引言嫦娥二号是中国第二个成功登月的探测器,其任务目标是实现月球软着陆、巡视和返回,是中国深空探测的里程碑之一。平动点间转移是嫦娥二号任务中一个重要的步骤,其主要目的是将航天器从当前轨道转移到阿波罗月球着陆点的附近。本文将介绍嫦娥二号平动点间转移的轨道方案研究。一、平动点间转移的意义平动点(L点)是指地球和月球之间距离相等的五个点之一,其中L1点位于地球和月球之间,L2点位于月球背面,L4点和L5点位于地月轨道上,L3点位于地球和太阳之间。平动点间转移是深空探测的一项重要任务