
一种基于SWOT分析和行为树的多智能体无人对抗系统的决策方法.pdf

Th****s3

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于SWOT分析和行为树的多智能体无人对抗系统的决策方法.pdf
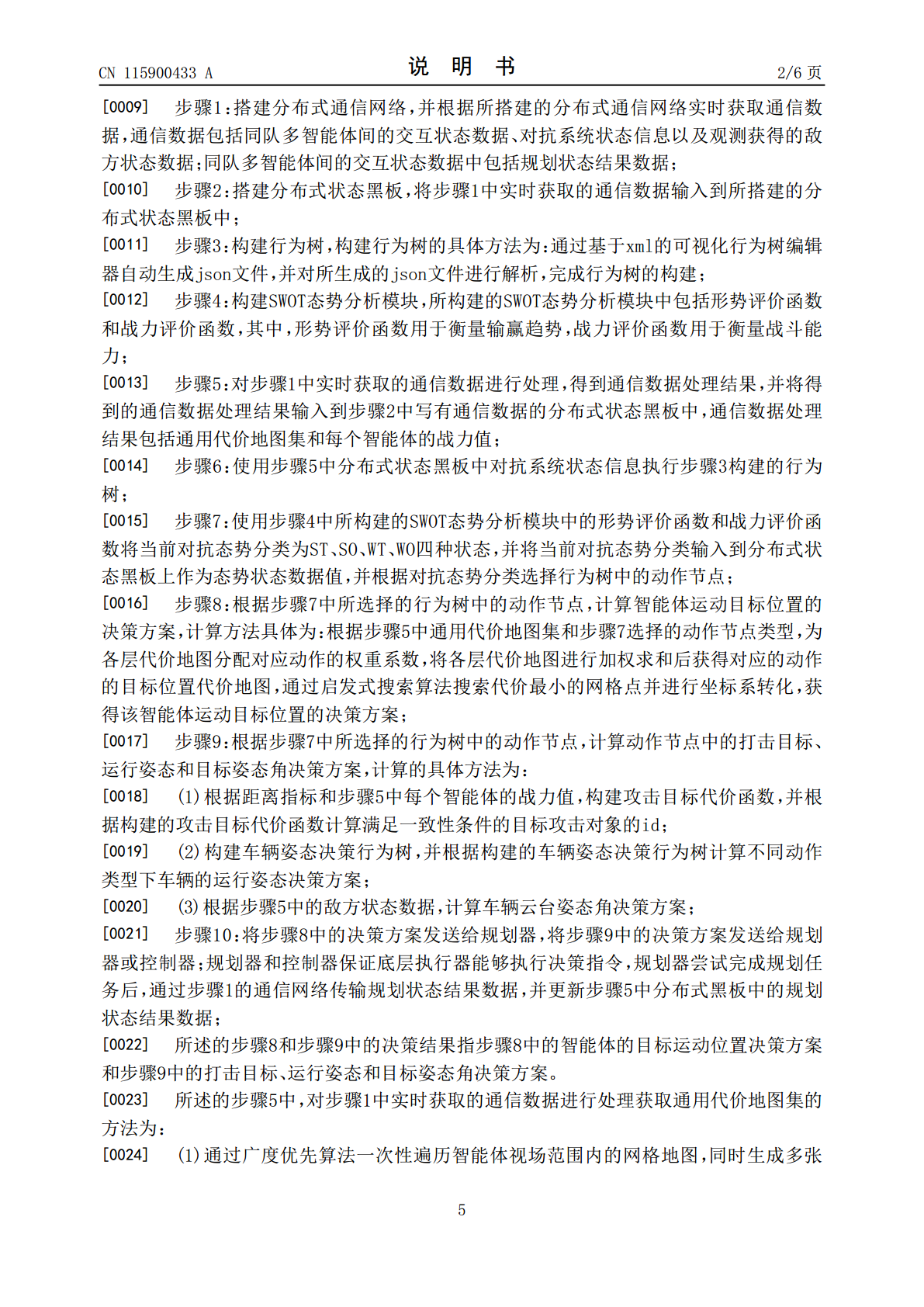
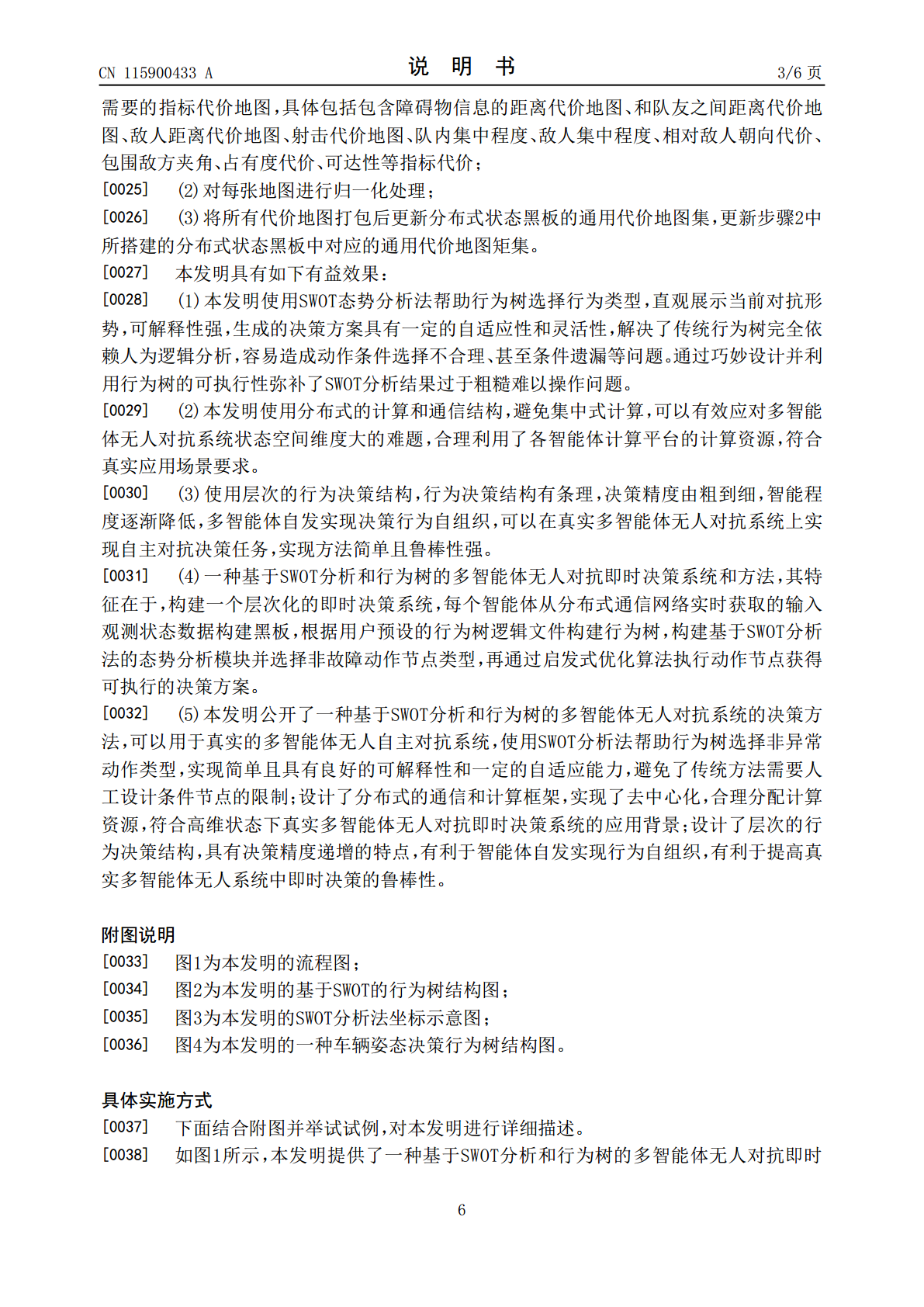
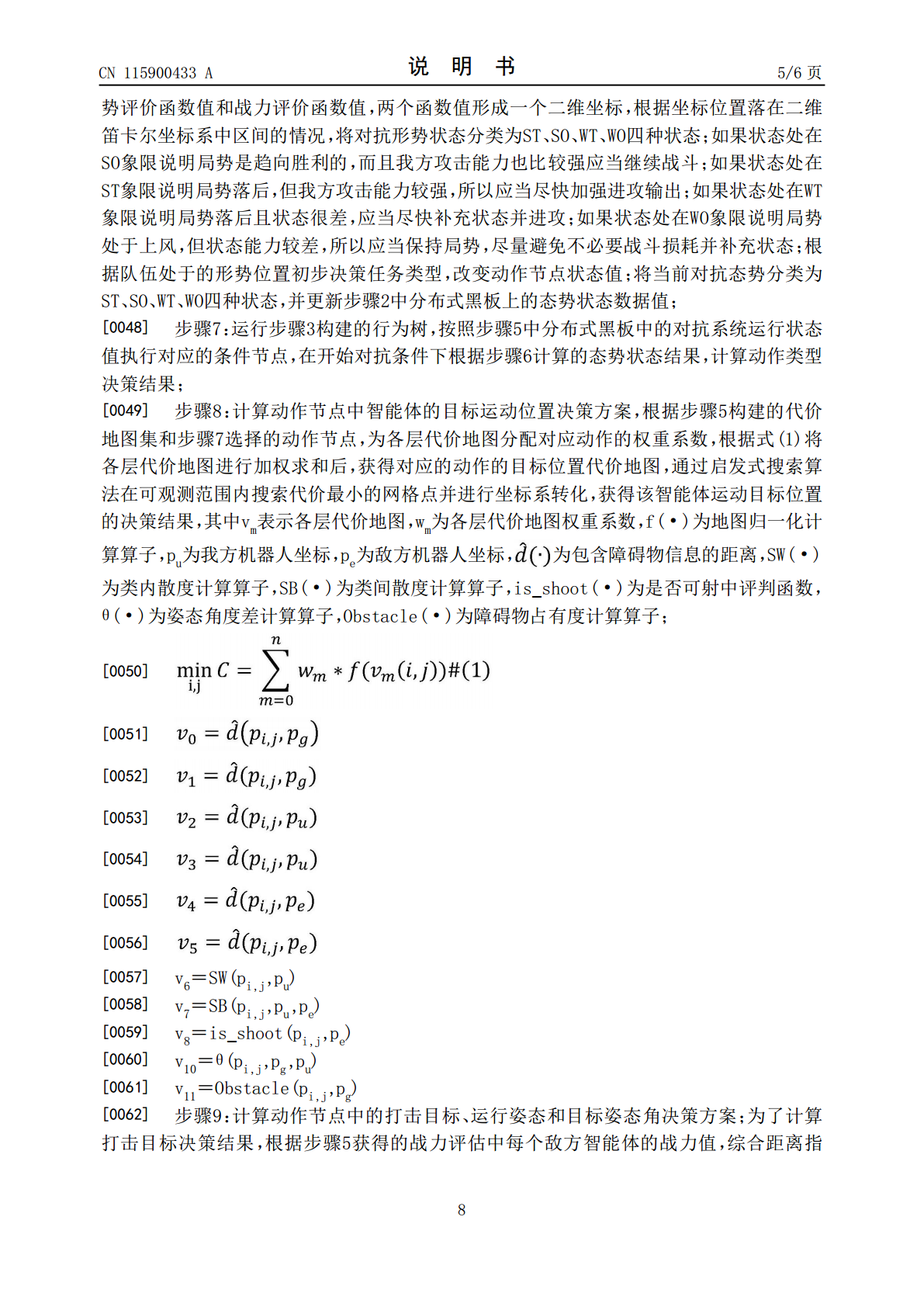
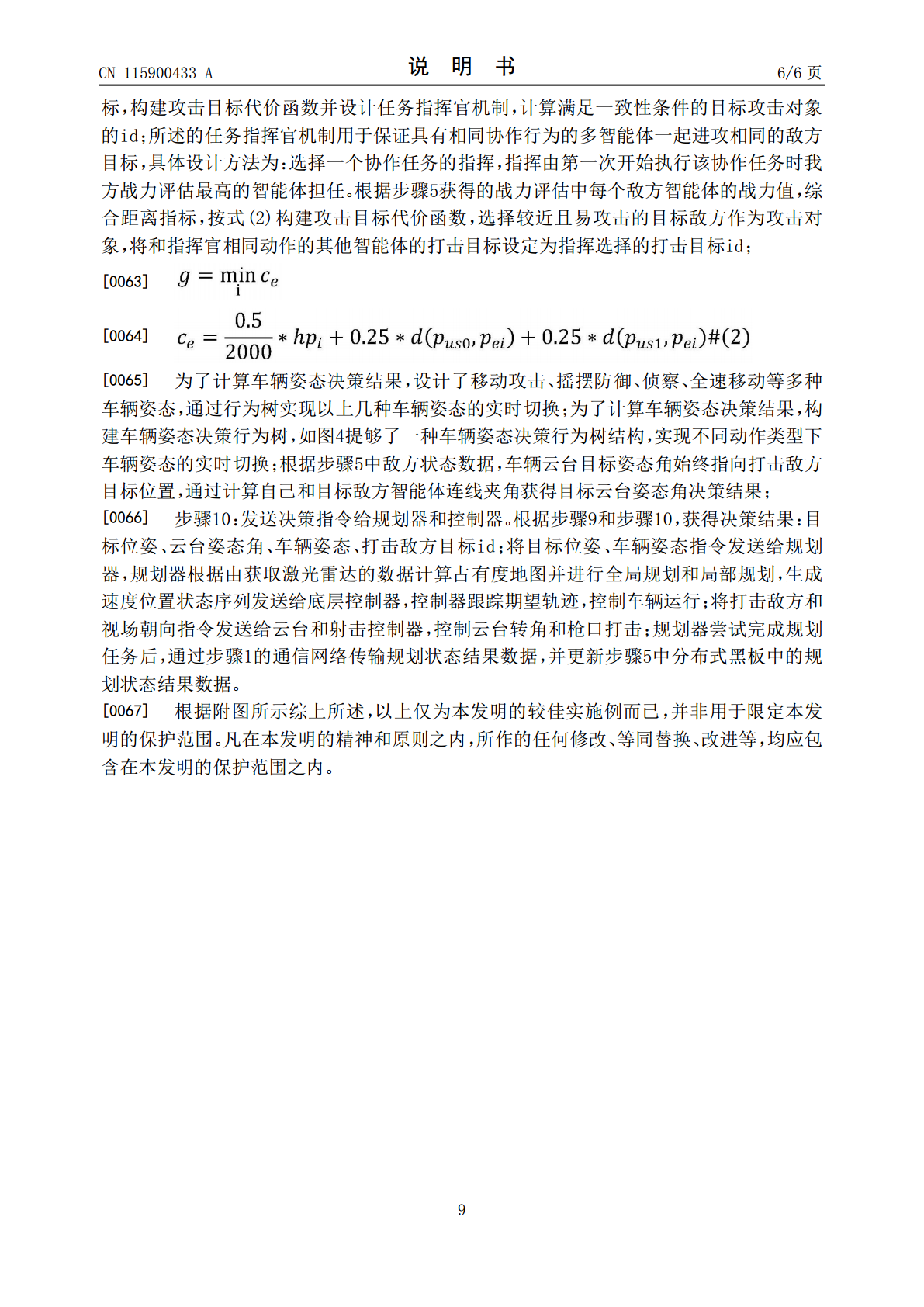
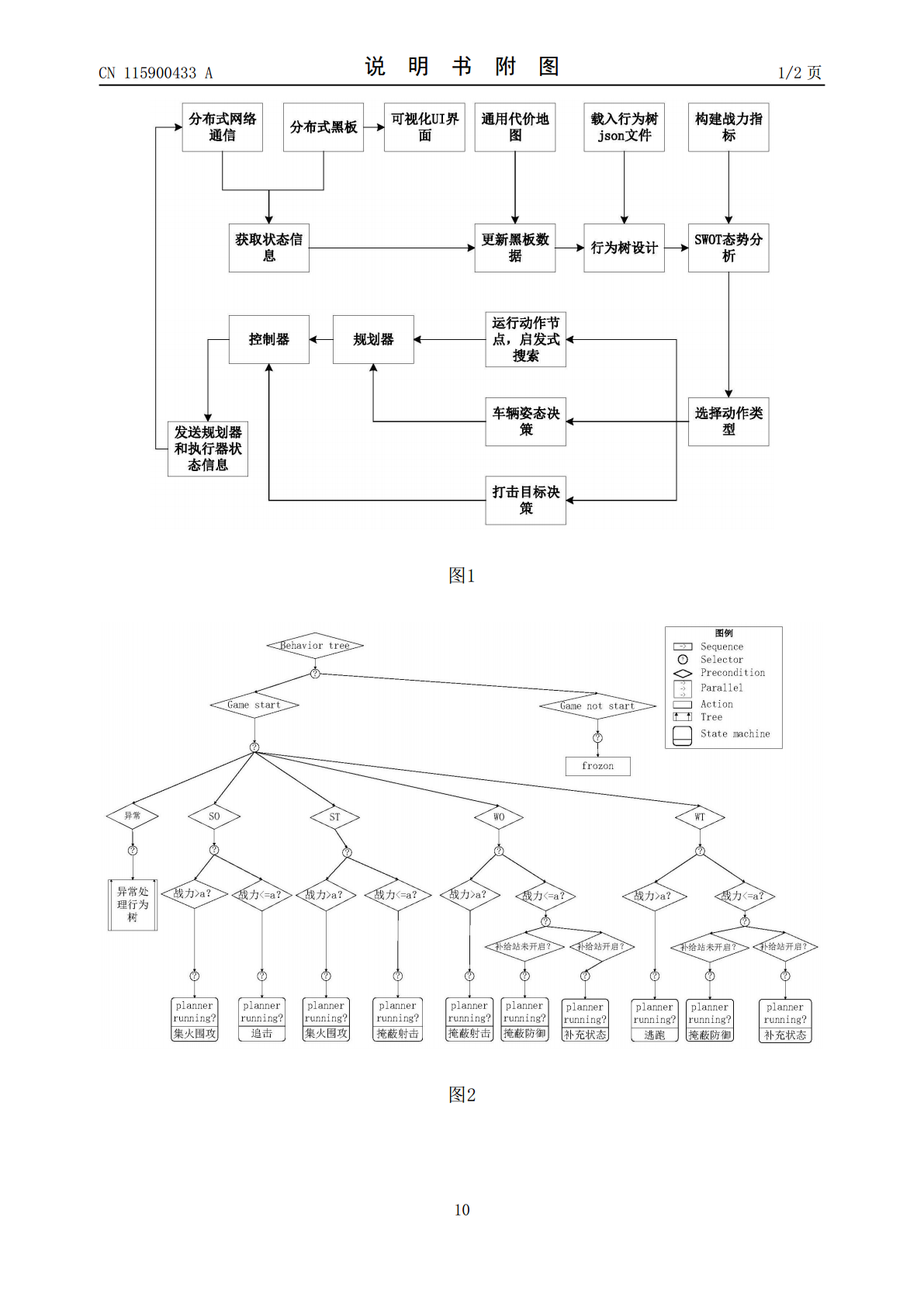
本发明公开了一种基于SWOT分析和行为树的多智能体无人对抗系统的决策方法,可以用于真实的多智能体无人自主对抗系统,使用SWOT分析法帮助行为树选择非异常动作类型,实现简单且具有良好的可解释性和一定的自适应能力,避免了传统方法需要人工设计条件节点的限制;设计了分布式的通信和计算框架,实现了去中心化,合理分配计算资源,符合高维状态下真实多智能体无人对抗即时决策系统的应用背景;设计了层次的行为决策结构,具有决策精度递增的特点,有利于智能体自发实现行为自组织,有利于提高真实多智能体无人系统中即时决策的鲁棒性。

基于多智能体强化学习的无人机集群对抗方法研究.docx
基于多智能体强化学习的无人机集群对抗方法研究摘要:无人机集群的应用不断扩大,但由于其群体智能的问题,需要对无人机集群进行对抗研究。本文提出了基于多智能体强化学习的无人机集群对抗方法,通过自主学习和协作,实现了对抗环境的优化和集群行为的调整。实验证明,该方法对于无人机集群对抗问题具有较好的效果。关键词:无人机集群;对抗方法;多智能体强化学习;协作引言:随着科技的发展,无人机的应用越来越广泛,从军事到民用、从单架到群体等方面都得到了应用。无人机群体的应用具有多种优势,如灵活性和机动性高、多维协作等等。然而,无

一种基于狼群狩猎行为仿生的无人智能集群对抗控制方法.pdf
本发明公开一种基于狼群狩猎行为仿生的无人智能集群对抗控制方法,所述的无人智能集群对抗控制方法结合了对灰狼狩猎行为的研究,以个体打击性能平庸的无人智能集群为主体、在集群间通讯性能低、个体实时视野有效的限制下,通过规模优势和机动性能优势对高打击性能敌方展开对抗。所述的控制方法将狼群社会的复杂角色分化充分简化为实际集群两种功能不同、相互配合的角色,即相对持久性强的β体与相对爆发力强的γ体,并将每一角色对抗行为继续划分为不同阶段,即β体的游走觅敌、发令‑循令集结、运动阻击三阶段与γ体的随群觅敌、遇敌冲锋两阶段,从
一种基于鹰群狩猎行为仿生的无人智能集群对抗控制方法.pdf
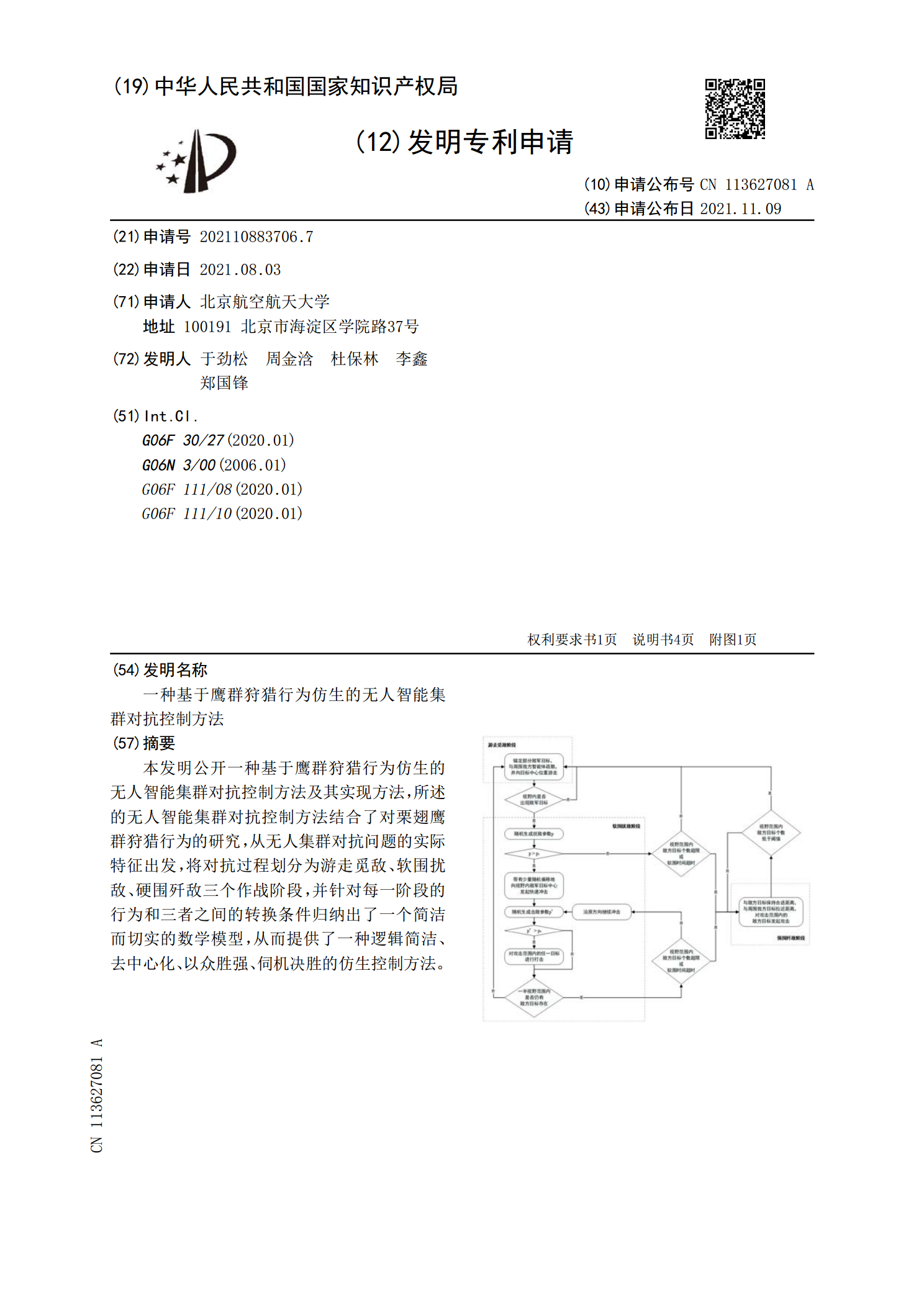
本发明公开一种基于鹰群狩猎行为仿生的无人智能集群对抗控制方法及其实现方法,所述的无人智能集群对抗控制方法结合了对栗翅鹰群狩猎行为的研究,从无人集群对抗问题的实际特征出发,将对抗过程划分为游走觅敌、软围扰敌、硬围歼敌三个作战阶段,并针对每一阶段的行为和三者之间的转换条件归纳出了一个简洁而切实的数学模型,从而提供了一种逻辑简洁、去中心化、以众胜强、伺机决胜的仿生控制方法。
面向兵力博弈对抗的BC-QMIX离在线多智能体行为决策建模方法.pdf
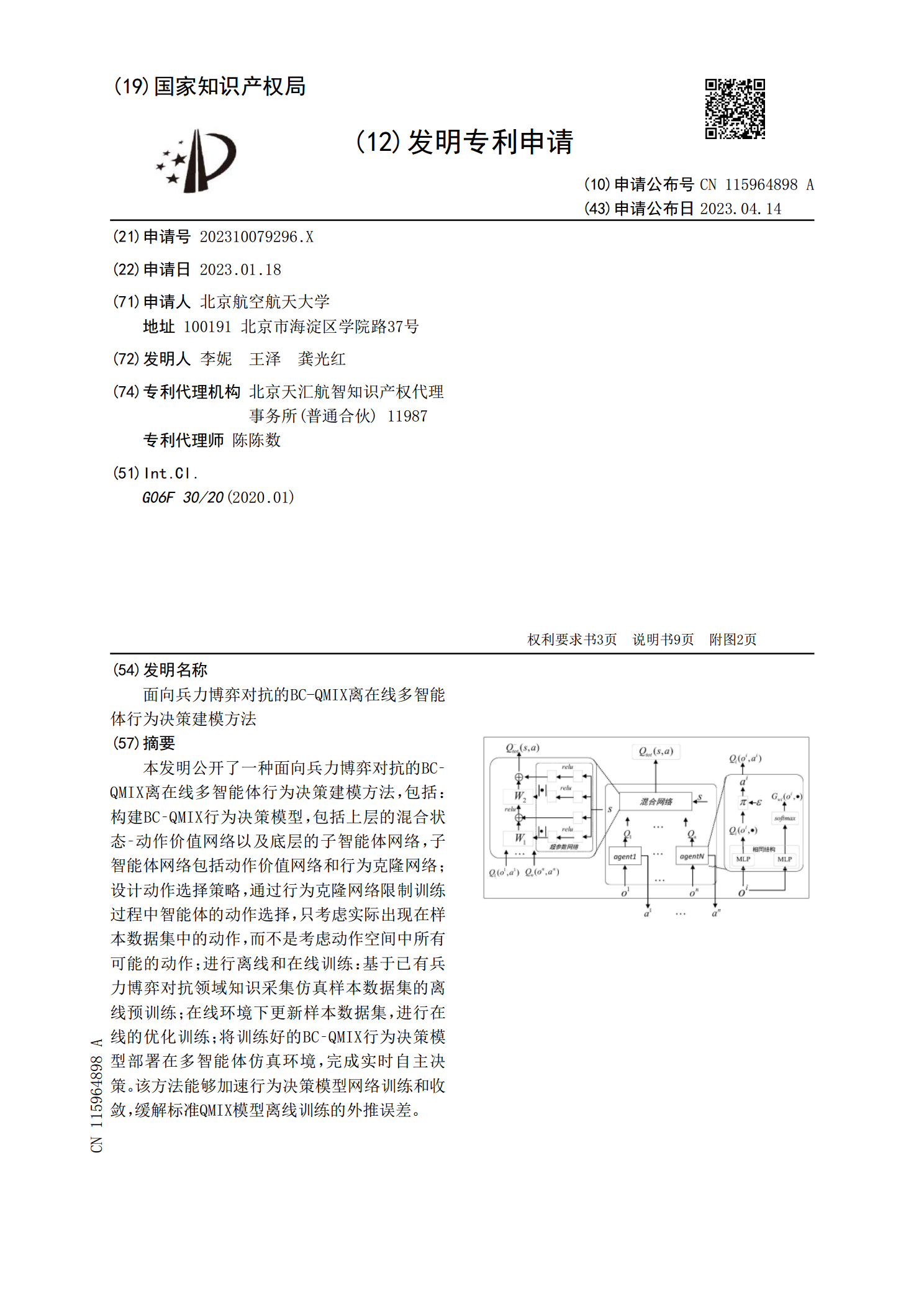
本发明公开了一种面向兵力博弈对抗的BC‑QMIX离在线多智能体行为决策建模方法,包括:构建BC‑QMIX行为决策模型,包括上层的混合状态‑动作价值网络以及底层的子智能体网络,子智能体网络包括动作价值网络和行为克隆网络;设计动作选择策略,通过行为克隆网络限制训练过程中智能体的动作选择,只考虑实际出现在样本数据集中的动作,而不是考虑动作空间中所有可能的动作;进行离线和在线训练:基于已有兵力博弈对抗领域知识采集仿真样本数据集的离线预训练;在线环境下更新样本数据集,进行在线的优化训练;将训练好的BC‑QMIX行为