
一种充电口定位方法以及相关装置.pdf

爱欢****23

1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共44页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种充电口定位方法以及相关装置.pdf
本申请实施例公开了一种充电口定位方法,方法包括:获取多个第一点云、多个点云集以及各个点云集之间的位置关系,多个点云集包括为预先对充电口区域构建的第一点云集,通过对多个第一点云与多个点云集之间的点云配准,得到移动充电设备的第一位姿,并根据第一位姿、以及第一点云集与目标点云集之间的位置关系,确定目标位移信息。本申请利用多个点云集为移动充电设备的搜索方向提供一个先验信息,即使在移动充电设备所在的位置处充电口不可见,由于预先生成了多个点云集(包括充电口的第一点云集)之间的位置关系,可基于移动充电设备的位姿以及目标

一种对移动终端充电的方法及装置以及充电系统.pdf
本发明实施例提供了一种对移动终端充电的方法及装置以及充电系统,方法包括:获取在对移动终端充电过程中充电电流的大小;若监听到移动终端的运动数据超过设定的门限值,且所述充电电流大于产生拉弧现象的临界电流值,则减小充电电流。本发明实施例在用户移动充电中的移动终端时减小了充电电流,避免了在移动终端侧拔出充电器时产生拉弧现象,破坏充电接口,延长了充电接口的使用寿命。
充电装置、充电方法以及车辆.pdf
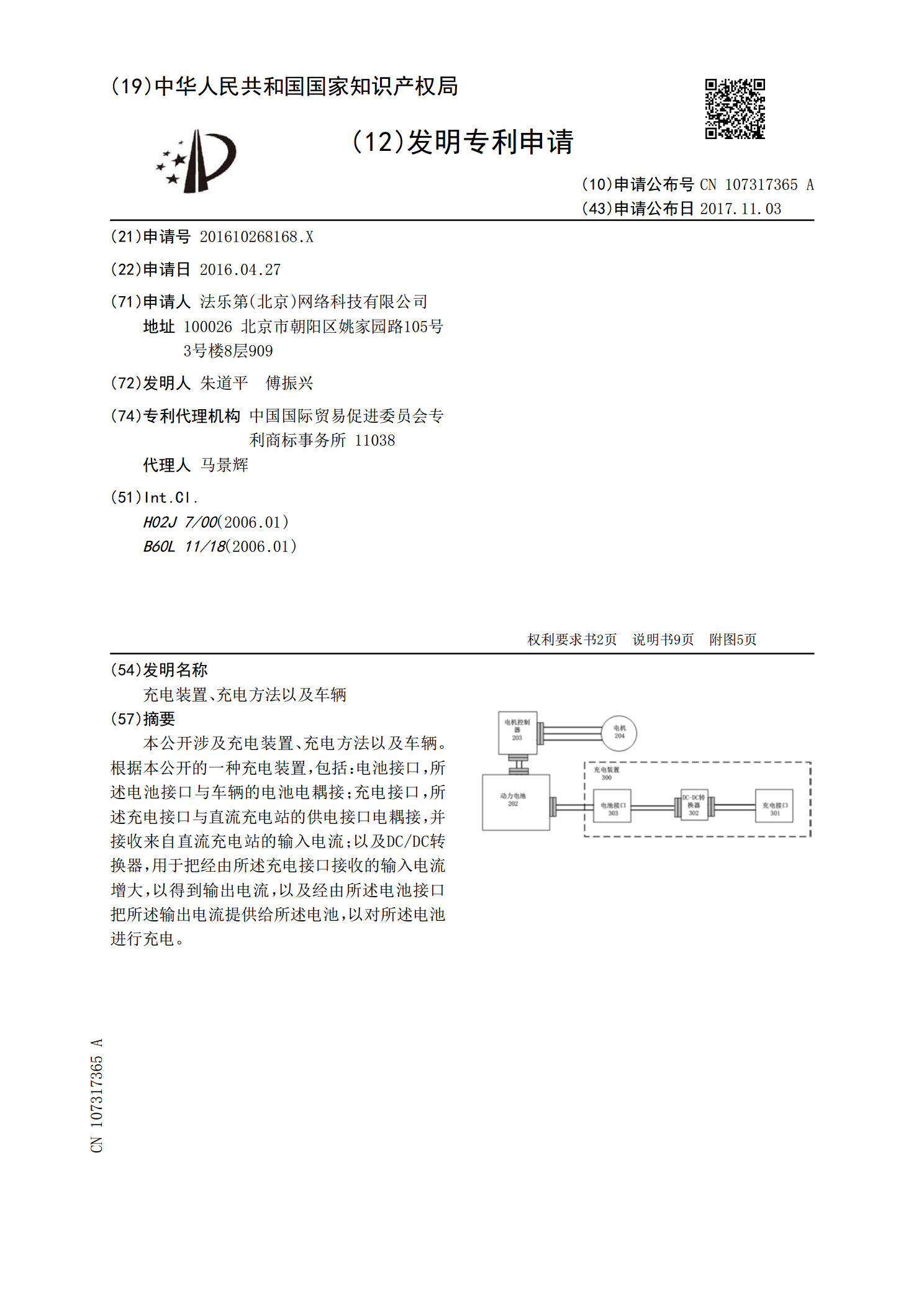
本公开涉及充电装置、充电方法以及车辆。根据本公开的一种充电装置,包括:电池接口,所述电池接口与车辆的电池电耦接;充电接口,所述充电接口与直流充电站的供电接口电耦接,并接收来自直流充电站的输入电流;以及DC/DC转换器,用于把经由所述充电接口接收的输入电流增大,以得到输出电流,以及经由所述电池接口把所述输出电流提供给所述电池,以对所述电池进行充电。

充电装置、充电方法以及车辆.pdf
本公开涉及充电装置、充电方法以及车辆。根据本公开的一种充电装置,包括:电池接口,所述电池接口与车辆的电池电耦接;充电接口,所述充电接口与直流充电站的供电接口电耦接;以及DC/DC转换器,用于把经由所述充电接口输入的所述直流充电站的输入电压降低,以得到输出电压,以及经由所述电池接口把所述输出电压提供给所述电池。

一种电池充电的控制方法、控制装置以及充电设备.pdf
本申请实施例涉及一种电池充电的控制方法、控制装置以及充电设备,电池的充电过程包括具有第一充电倍率的第一恒电流充电阶段和具有第二充电倍率的第二恒电流充电阶段,控制方法包括:获取负极极片中硅元素在负极活性材料的重量百分比,负极活性材料克容量与硅在负极活性材料的百分含量满足模型(1);根据负极活性材料的克容量,并且结合预设计算模型(2),计算预设充电状态的SOC;控制充电模块按第一恒电流充电阶段对电池进行充电;当电池的电量达到预设充电状态的SOC时,控制充电模块按第二恒电流充电阶段对电池进行充电,直至电池的充电