
一种基于深度区间估计的无监督单目深度估计方法.pdf

书生****12

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于深度区间估计的无监督单目深度估计方法.pdf
本发明公开了一种基于深度区间估计的无监督单目深度估计方法,具体为:采用深度估计模型对视频帧进行如下处理:1:提取当前帧的特征图像F;2:对F的空间张量进行空间重构,得到向量x
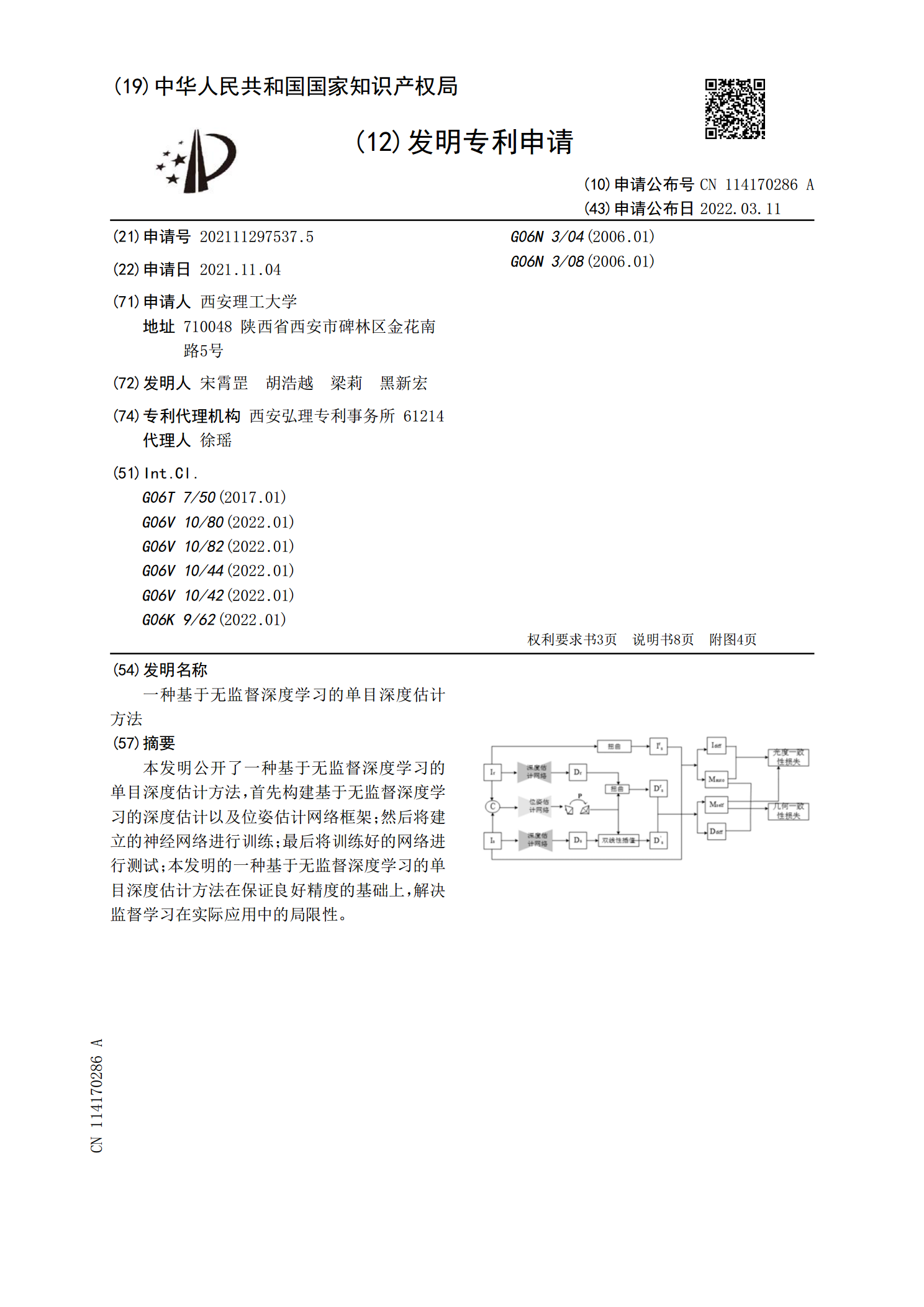
一种基于无监督深度学习的单目深度估计方法.pdf
本发明公开了一种基于无监督深度学习的单目深度估计方法,首先构建基于无监督深度学习的深度估计以及位姿估计网络框架;然后将建立的神经网络进行训练;最后将训练好的网络进行测试;本发明的一种基于无监督深度学习的单目深度估计方法在保证良好精度的基础上,解决监督学习在实际应用中的局限性。
基于密集特征融合的无监督单目深度估计.pptx
,目录PartOnePartTwo特征提取特征融合策略特征融合的优势特征融合的挑战PartThree无监督学习的定义和重要性单目深度估计的挑战基于密集特征融合的无监督单目深度估计方法方法的有效性和局限性PartFour数据集和实验设置性能评估指标实验结果和分析结果比较和讨论PartFive结论总结未来工作方向THANKS
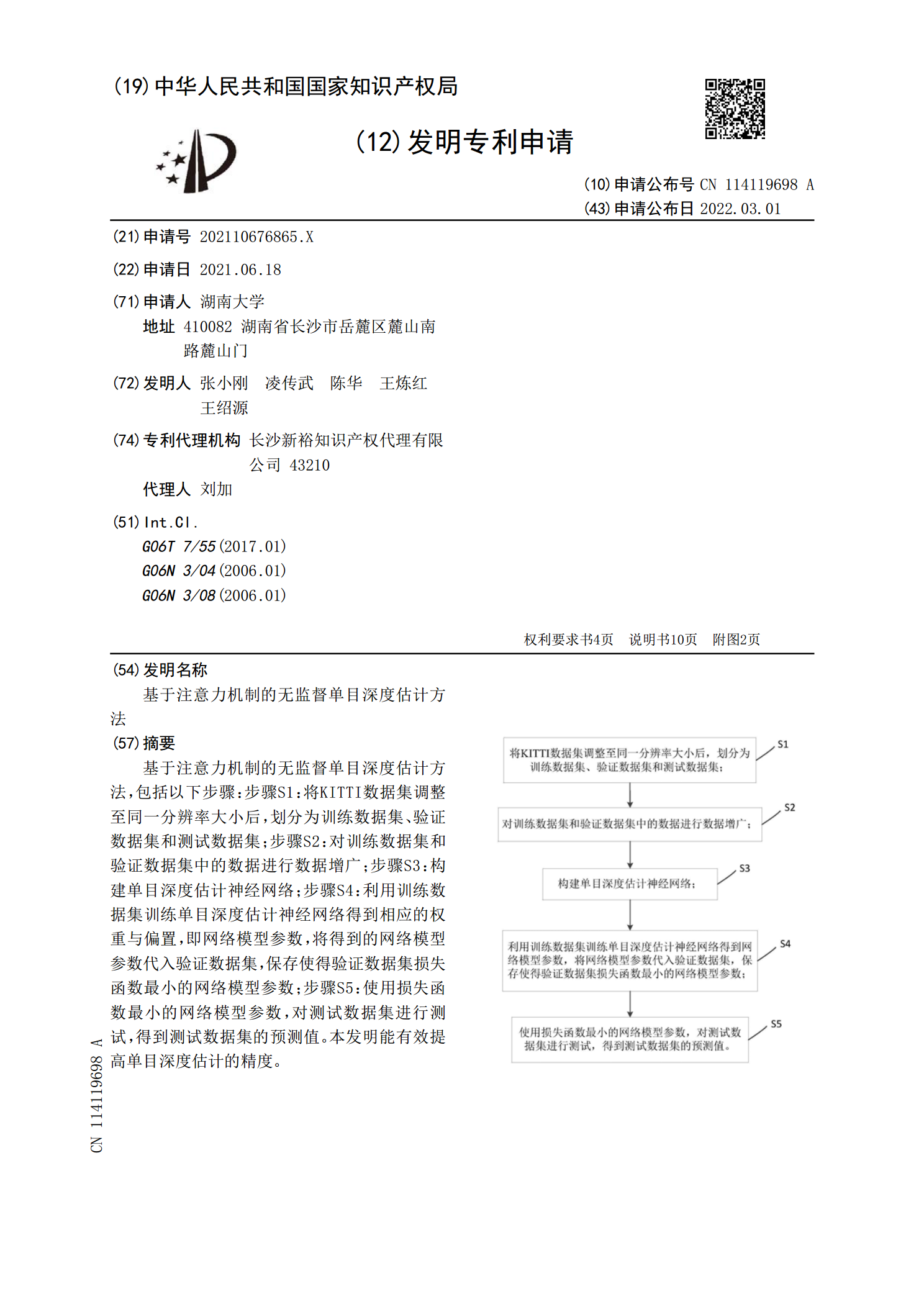
基于注意力机制的无监督单目深度估计方法.pdf
基于注意力机制的无监督单目深度估计方法,包括以下步骤:步骤S1:将KITTI数据集调整至同一分辨率大小后,划分为训练数据集、验证数据集和测试数据集;步骤S2:对训练数据集和验证数据集中的数据进行数据增广;步骤S3:构建单目深度估计神经网络;步骤S4:利用训练数据集训练单目深度估计神经网络得到相应的权重与偏置,即网络模型参数,将得到的网络模型参数代入验证数据集,保存使得验证数据集损失函数最小的网络模型参数;步骤S5:使用损失函数最小的网络模型参数,对测试数据集进行测试,得到测试数据集的预测值。本发明能有效提

基于深度学习的单目图像深度估计.docx
基于深度学习的单目图像深度估计基于深度学习的单目图像深度估计摘要:深度图像是计算机视觉领域中一个重要的问题,它在许多领域中发挥着重要的作用,如三维重建、物体检测和跟踪等。传统的方法通常依赖于多个相机或者深度传感器来获取深度信息。然而,这种方法通常成本昂贵且不便于应用,因此,单目图像深度估计成为一个热门的研究方向。近年来,深度学习的快速发展为单目图像深度估计提供了新的机会。本文将综述基于深度学习的单目图像深度估计的研究现状和发展趋势,并讨论其中的挑战和解决方案。1.引言深度图像是指每个像素点相对于相机的距离