
一种自动无尘打磨装置.pdf

雨巷****碧易


1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自动无尘打磨装置.pdf
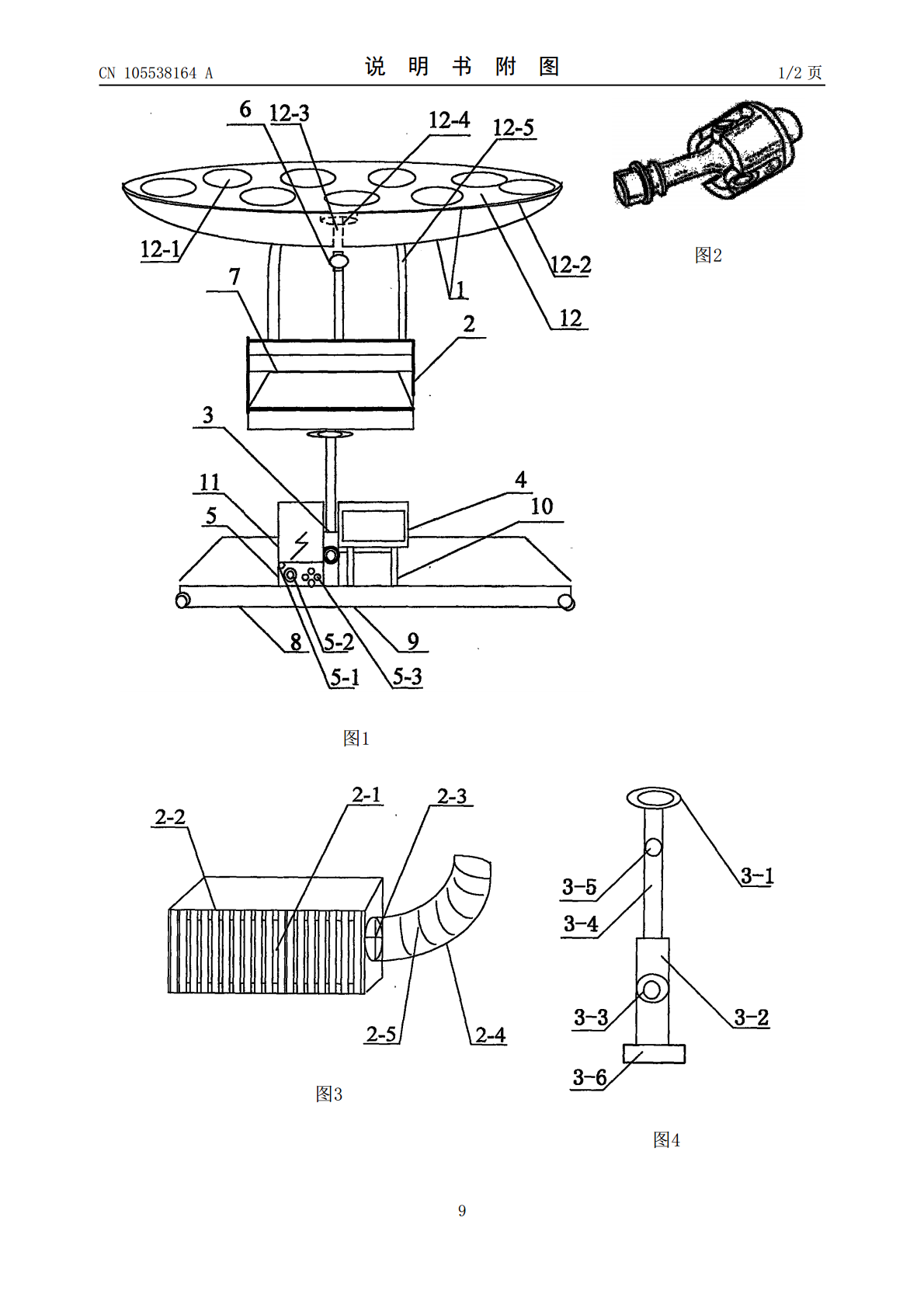
本发明提供了一种自动无尘打磨装置,打磨主体安装在除尘装置的上部,打磨主体呈莲蓬头状,打磨主体的中心安装有打磨盘,打磨主体的下端安装有驱动马达,驱动马达的输出轴与打磨盘相连接;打磨盘上及四周分布圆形防尘吸口,打磨盘的底部套装有外罩,外罩连通吸气软管,吸气软管的下端与除尘装置内部相连通;打磨盘下端的支杆上安装一转向方向节;除尘装置的前端安装有防尘网口,除尘装置的下端通过升降旋转装置安装在底盘上。打磨转盘旋转并吸尘,在弹簧圈与自动开合挡片的配合下,除尘装置除尘,升降旋转装置进行旋转升降,旋转定位电机调整上部升降
一种无尘建筑地面用打磨装置.pdf
本发明公开了一种无尘建筑地面用打磨装置,包括伸缩柱,伸缩柱上端连接有限位条,左侧限位条上端连接有从动行走轮,从动行走轮中部连接有从动轴,右侧限位条上端连接有主动行走轮,主动行走轮中部连接有主动轴,主动轴两端连接有限位架,限位架上端连接有安装板,安装板上端连接有行走电机,行走电机左端连接有主动带轮,主动带轮下端通过皮带连接有从动带轮,从动轴与左侧限位架之间连接有行走架,行走架中部连接有驱动箱,驱动箱下端连接有吸尘罩,伸缩柱下端连接有固定座。本发明,满足了对建筑地面打磨的需要,避免人工扶着打磨机进行打磨,既降
一种无尘建筑装饰板打磨装置.pdf
本发明公开了一种无尘建筑装饰板打磨装置,包括左侧设有推进部的机架,推进部上侧的机架左侧端面内设有打磨腔,打磨腔内顶壁内设有第一滑动槽,第一滑动槽内设有第一螺纹杆,第一螺纹杆上螺纹配合连接有打磨滑动块,推进部内设有左右延伸设置的第二滑动槽,推进部右侧的机架内设有嵌入槽,嵌入槽左侧端与第二滑动槽右侧延伸末端相贯穿设置,嵌入槽右侧内壁与第二滑动槽左侧内壁之间设有第二螺纹杆,第二螺纹杆上方的嵌入槽右侧内壁与第二滑动槽左侧内壁之间设有花键转轴,嵌入槽内的第二螺纹杆上周向固定连接有第一锥形轮,第二滑动槽内的第二螺纹杆
无尘式建材切割打磨装置.pdf
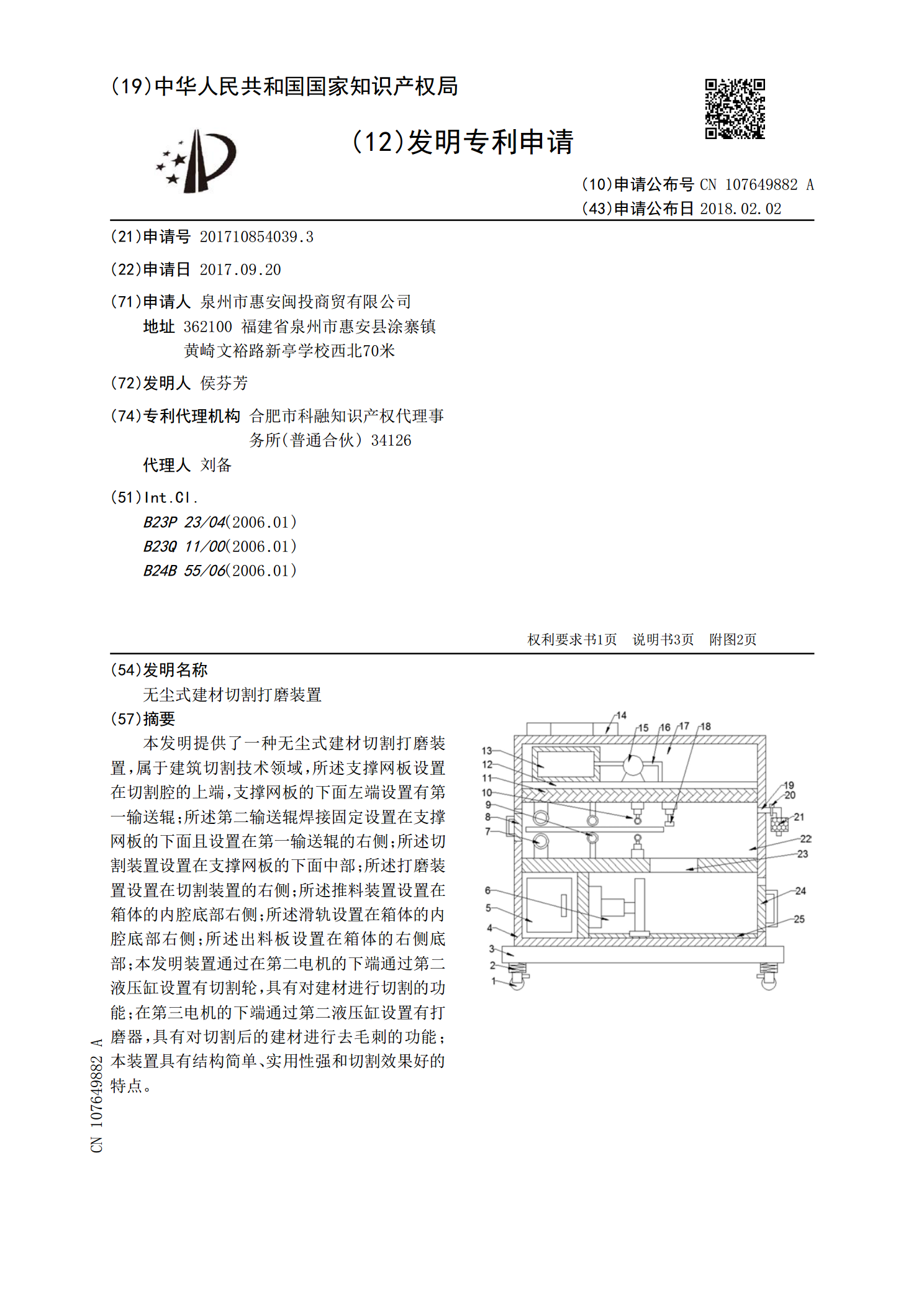
本发明提供了一种无尘式建材切割打磨装置,属于建筑切割技术领域,所述支撑网板设置在切割腔的上端,支撑网板的下面左端设置有第一输送辊;所述第二输送辊焊接固定设置在支撑网板的下面且设置在第一输送辊的右侧;所述切割装置设置在支撑网板的下面中部;所述打磨装置设置在切割装置的右侧;所述推料装置设置在箱体的内腔底部右侧;所述滑轨设置在箱体的内腔底部右侧;所述出料板设置在箱体的右侧底部;本发明装置通过在第二电机的下端通过第二液压缸设置有切割轮,具有对建材进行切割的功能;在第三电机的下端通过第二液压缸设置有打磨器,具有对切
一种无尘式的建筑装饰板打磨装置.pdf
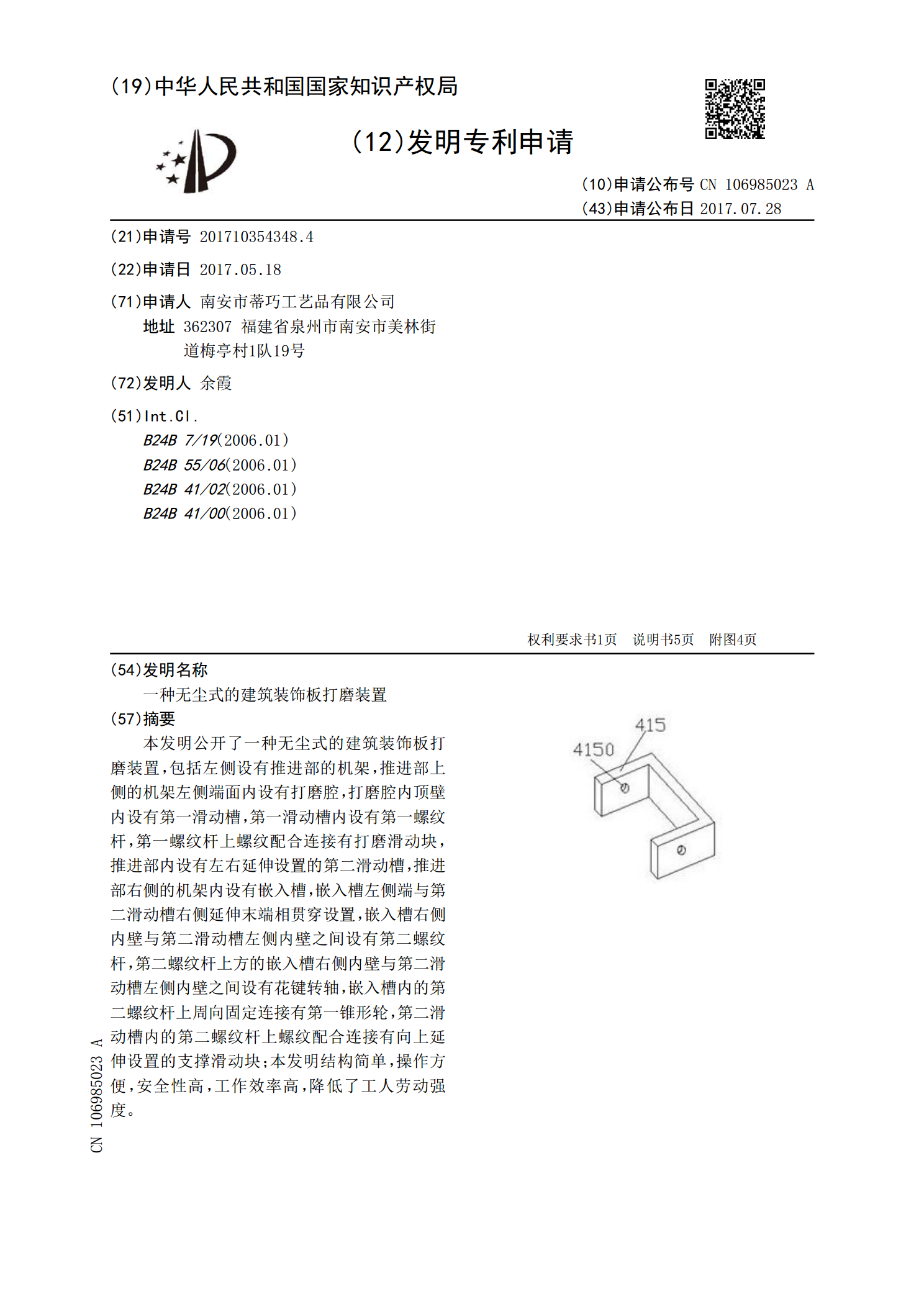
本发明公开了一种无尘式的建筑装饰板打磨装置,包括左侧设有推进部的机架,推进部上侧的机架左侧端面内设有打磨腔,打磨腔内顶壁内设有第一滑动槽,第一滑动槽内设有第一螺纹杆,第一螺纹杆上螺纹配合连接有打磨滑动块,推进部内设有左右延伸设置的第二滑动槽,推进部右侧的机架内设有嵌入槽,嵌入槽左侧端与第二滑动槽右侧延伸末端相贯穿设置,嵌入槽右侧内壁与第二滑动槽左侧内壁之间设有第二螺纹杆,第二螺纹杆上方的嵌入槽右侧内壁与第二滑动槽左侧内壁之间设有花键转轴,嵌入槽内的第二螺纹杆上周向固定连接有第一锥形轮,第二滑动槽内的第二螺