
一种楼宇外窗清洁无人机.pdf

星星****眨眼


1/10

2/10

3/10

4/10
5/10
6/10
7/10

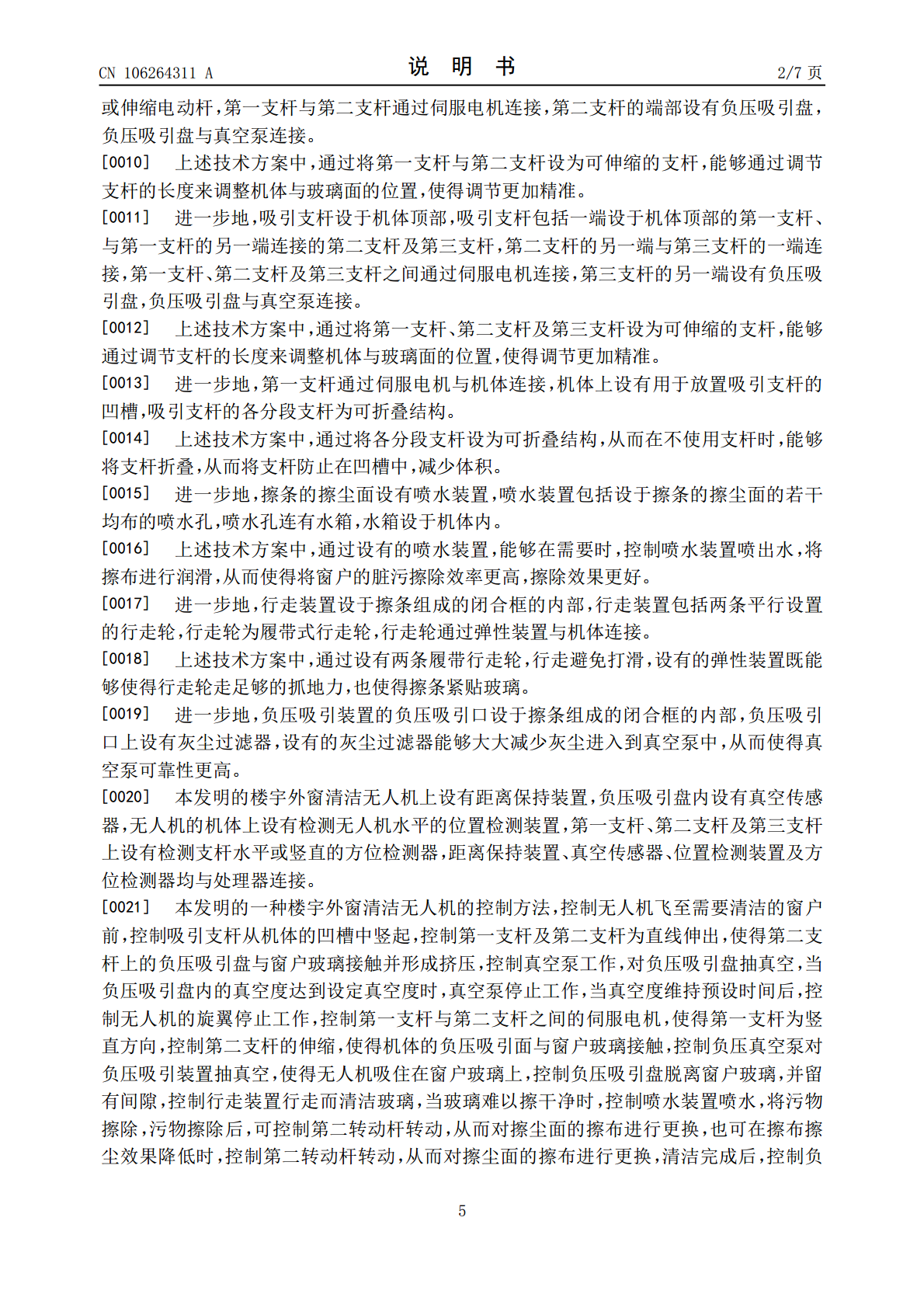
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种楼宇外窗清洁无人机.pdf
本发明公开了一种楼宇外窗清洁无人机,属于无人机领域。包括机体、擦尘装置及设于机体四周的四个旋翼,机体的底部设有擦尘装置、负压吸引装置及行走装置,机体的侧壁或顶部设有吸引支杆,吸引支杆及负压吸引装置与真空泵连接,吸引支杆由多段可左右转动的转动杆连接组成。本发明提供一种楼宇外窗清洁无人机,使得在清洗居民楼或写字楼的外窗的时候能够更加方便,能够直接通过控制无人机飞到窗户上即可清理,清洁效率高,清洁方式更加安全,并且能够清洗得更加干净,无人机的回收更加快速;本发明还提供一种楼宇外窗清洁无人机的控制方法,通过这种控

一种带无人机的楼宇多功能清洁车.pdf
本发明公开了一种带无人机的楼宇多功能清洁车,包括存储箱、动力装置、旋转拖把桶、储水箱、除湿吹风、挂式垃圾桶、控制板、底盘刷、簸箕、笤帚、拖把、垃圾袋存放盒、行走轮、脚踏板,存储箱包括盖板和挂钩,盖板安装在存储箱的上方,盖板一侧设有挂钩,动力装置包括电机、五孔插座和插座盖板,旋转拖把桶右侧安装有储水箱;本种带无人机的楼宇多功能清洁车,动力装置蓄电池采用聚合物锂离子电池,保证了清洁人员在清洁过程中动力输出的安全可靠且续航能力强,容量损失小,储水箱内部安装有低压水泵且水枪装置与动力装置属于独立操作系统,使得清洁
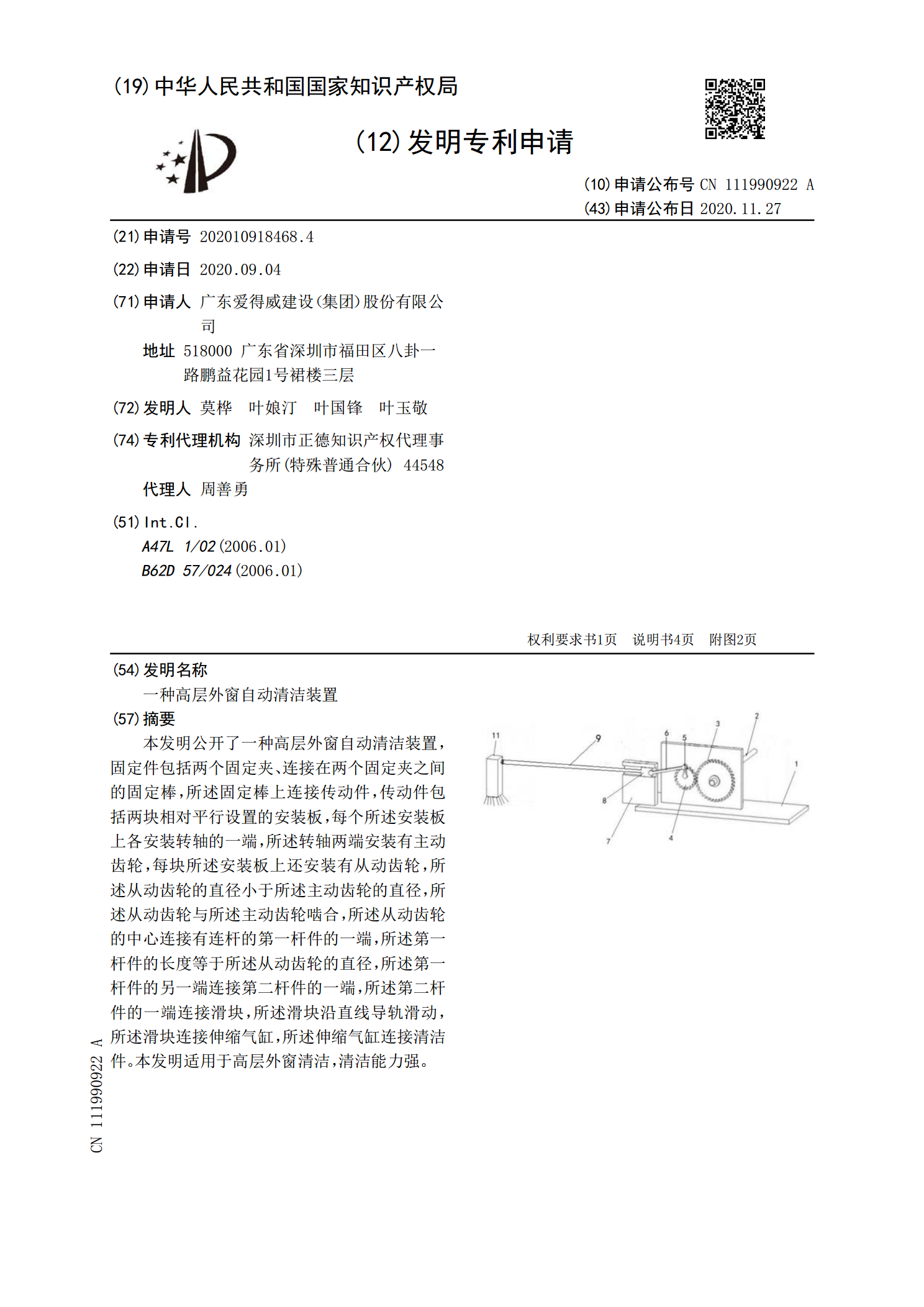
一种高层外窗自动清洁装置.pdf
本发明公开了一种高层外窗自动清洁装置,固定件包括两个固定夹、连接在两个固定夹之间的固定棒,所述固定棒上连接传动件,传动件包括两块相对平行设置的安装板,每个所述安装板上各安装转轴的一端,所述转轴两端安装有主动齿轮,每块所述安装板上还安装有从动齿轮,所述从动齿轮的直径小于所述主动齿轮的直径,所述从动齿轮与所述主动齿轮啮合,所述从动齿轮的中心连接有连杆的第一杆件的一端,所述第一杆件的长度等于所述从动齿轮的直径,所述第一杆件的另一端连接第二杆件的一端,所述第二杆件的一端连接滑块,所述滑块沿直线导轨滑动,所述滑块连

一种全自动楼宇清洁机.pdf
本发明公开了一种全自动楼宇清洁机,包括骨架,所述骨架的底部设有清洗液箱,骨架通过轴承分别与上橡胶毛刷轮和下橡胶毛刷轮连接,上橡胶毛刷轮和下橡胶毛刷轮上下并排设置,骨架的侧面安装有减速电机和泵,所述减速电机的数量为两个,且两个减速电机分别与上橡胶毛刷轮和下橡胶毛刷轮对应设置,左侧的减速电机的主轴与上橡胶毛刷轮的端部连接,右侧的减速电机的主轴与下橡胶毛刷轮的端部连接,骨架的前侧设有第三导管,第三导管的端部与泵的出液口连通,本全自动楼宇清洁机易操作并且不需要人高空作业,杜绝了高空作业的危险性,施工人员人身安全得

一种高空清洁用无人机.pdf
本发明公开了一种高空清洁用无人机,包括飞行控制部分、储水装置、清洁装置、固定装置、降落支撑架;所述无人机还包括空气水分收集装置,所述空气水分收集装置与所述储水装置连接,且位于所述储水装置的上方,用于收集空气中的水气进行冷凝制水。通过直接在机体中加入空气水分收集装置,直接从空气中获取清洁用水,解决无人机由于供水问题造成的不便,延长工作时间,大大节约成本;进一步的通过优化设计,减轻机重,改善清洁效果。