
多旋翼无人机及其控制方法.pdf

康佳****文库

1/9
2/9

3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多旋翼无人机及其控制方法.pdf
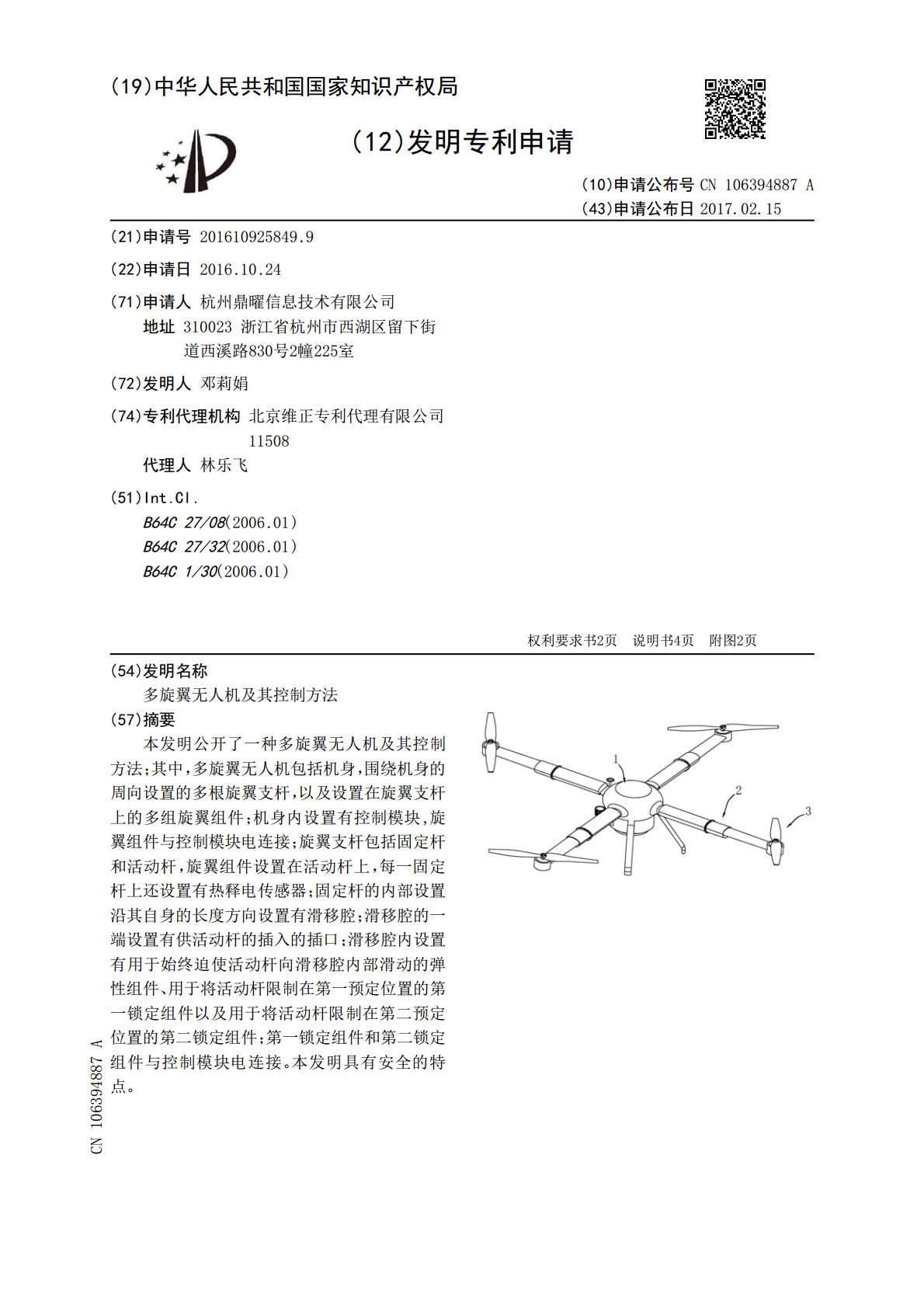
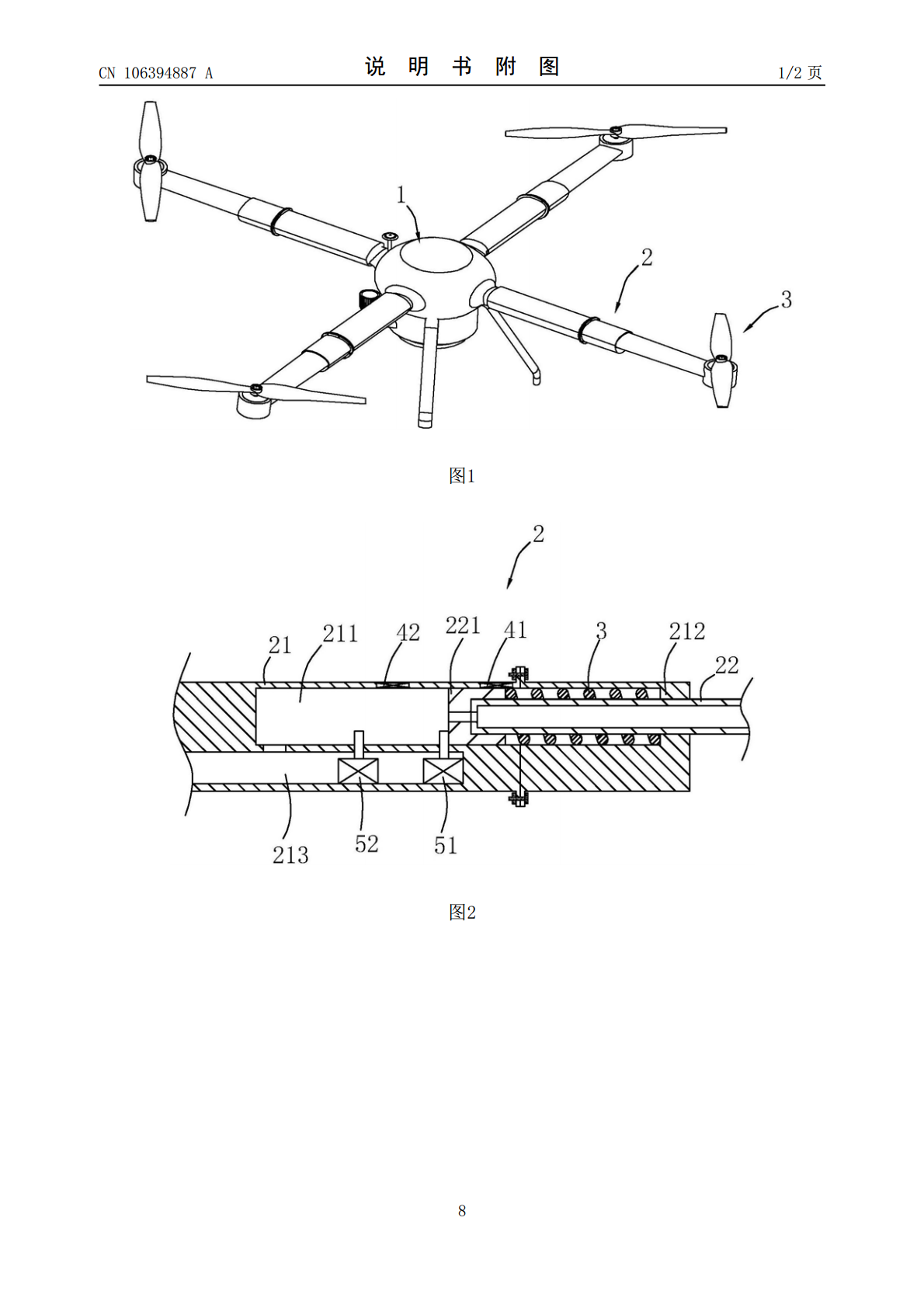
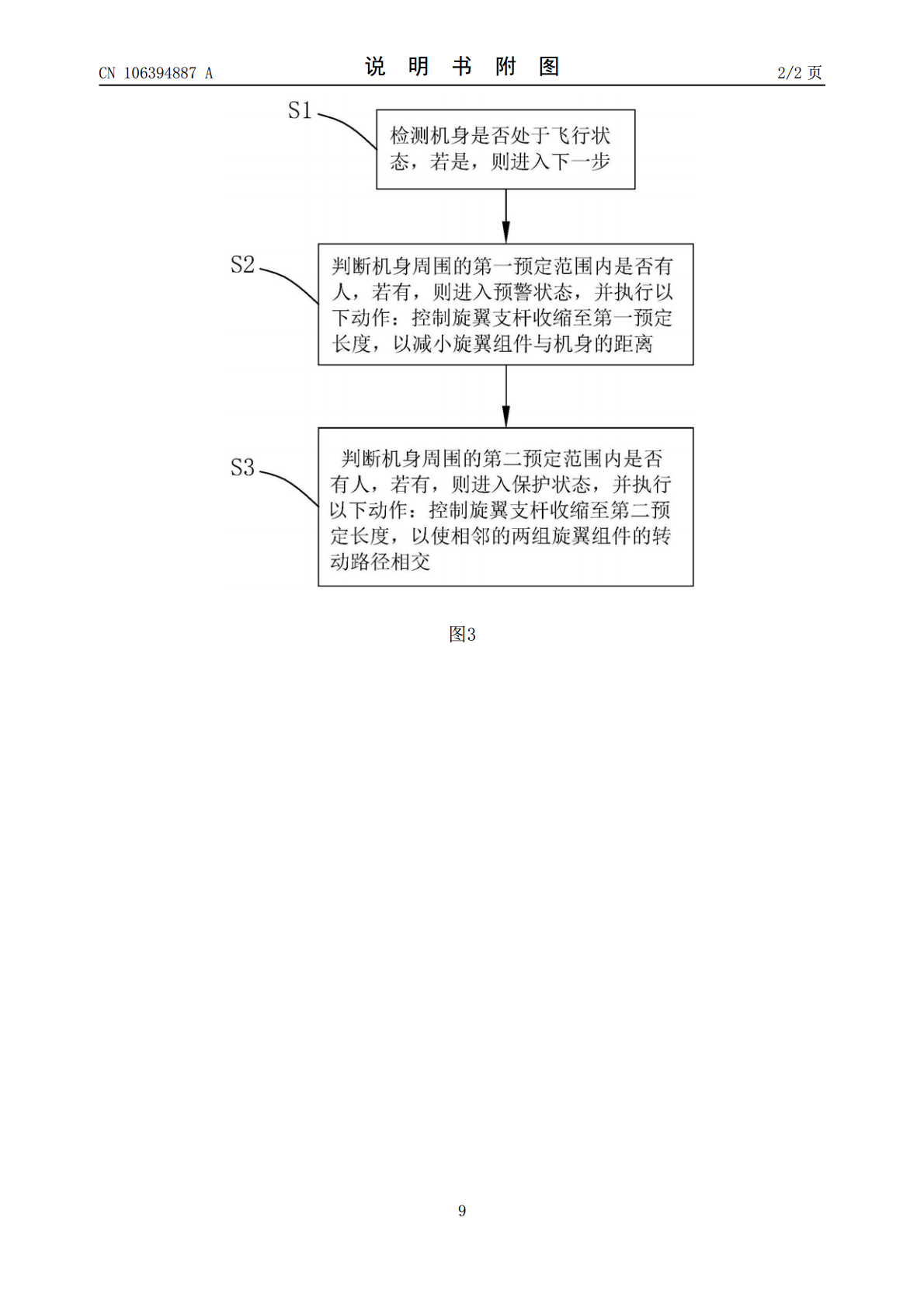
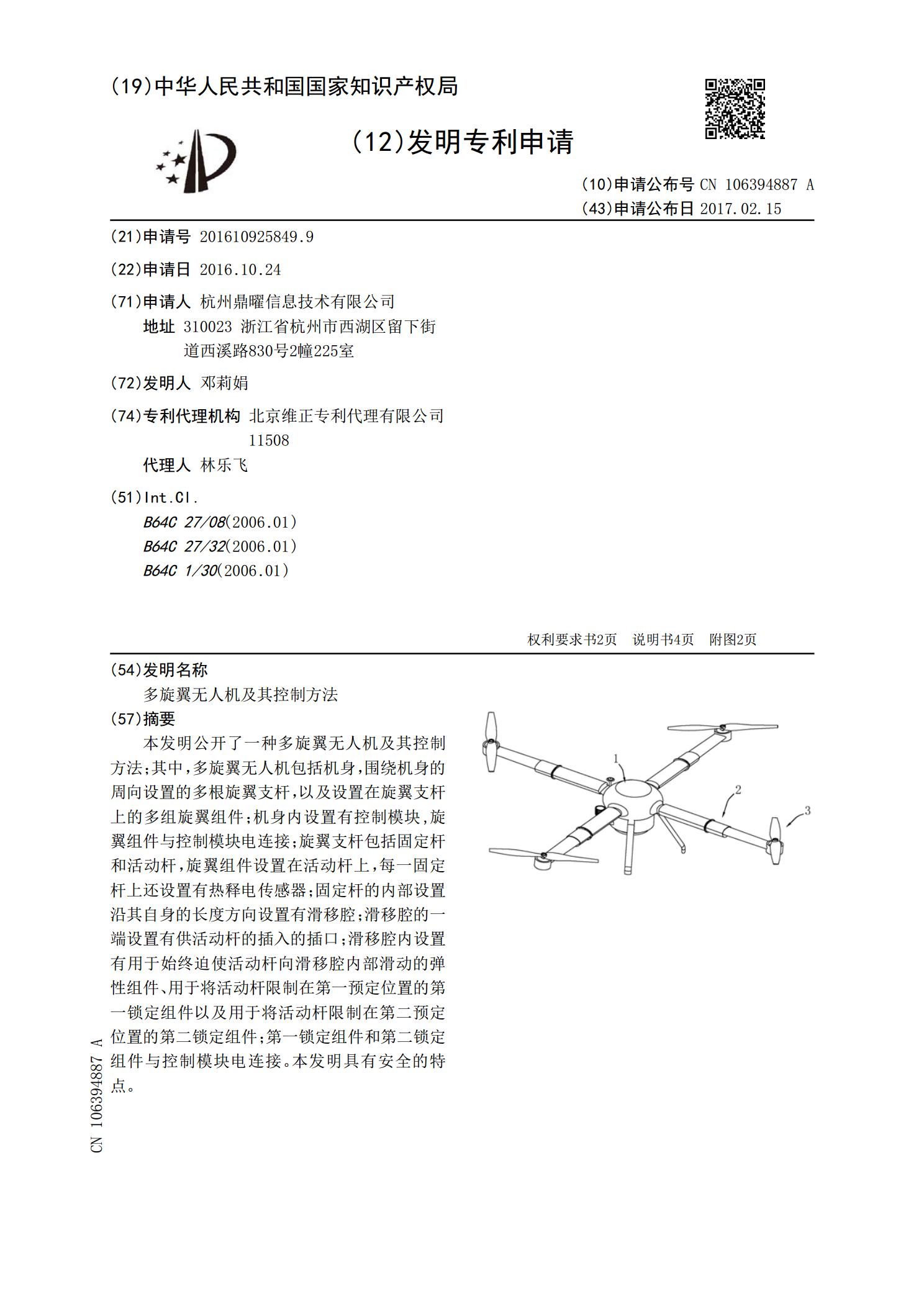
本发明公开了一种多旋翼无人机及其控制方法;其中,多旋翼无人机包括机身,围绕机身的周向设置的多根旋翼支杆,以及设置在旋翼支杆上的多组旋翼组件;机身内设置有控制模块,旋翼组件与控制模块电连接;旋翼支杆包括固定杆和活动杆,旋翼组件设置在活动杆上,每一固定杆上还设置有热释电传感器;固定杆的内部设置沿其自身的长度方向设置有滑移腔;滑移腔的一端设置有供活动杆的插入的插口;滑移腔内设置有用于始终迫使活动杆向滑移腔内部滑动的弹性组件、用于将活动杆限制在第一预定位置的第一锁定组件以及用于将活动杆限制在第二预定位置的第二锁定
蜂巢式集群多旋翼无人机结构及其控制方法.pdf
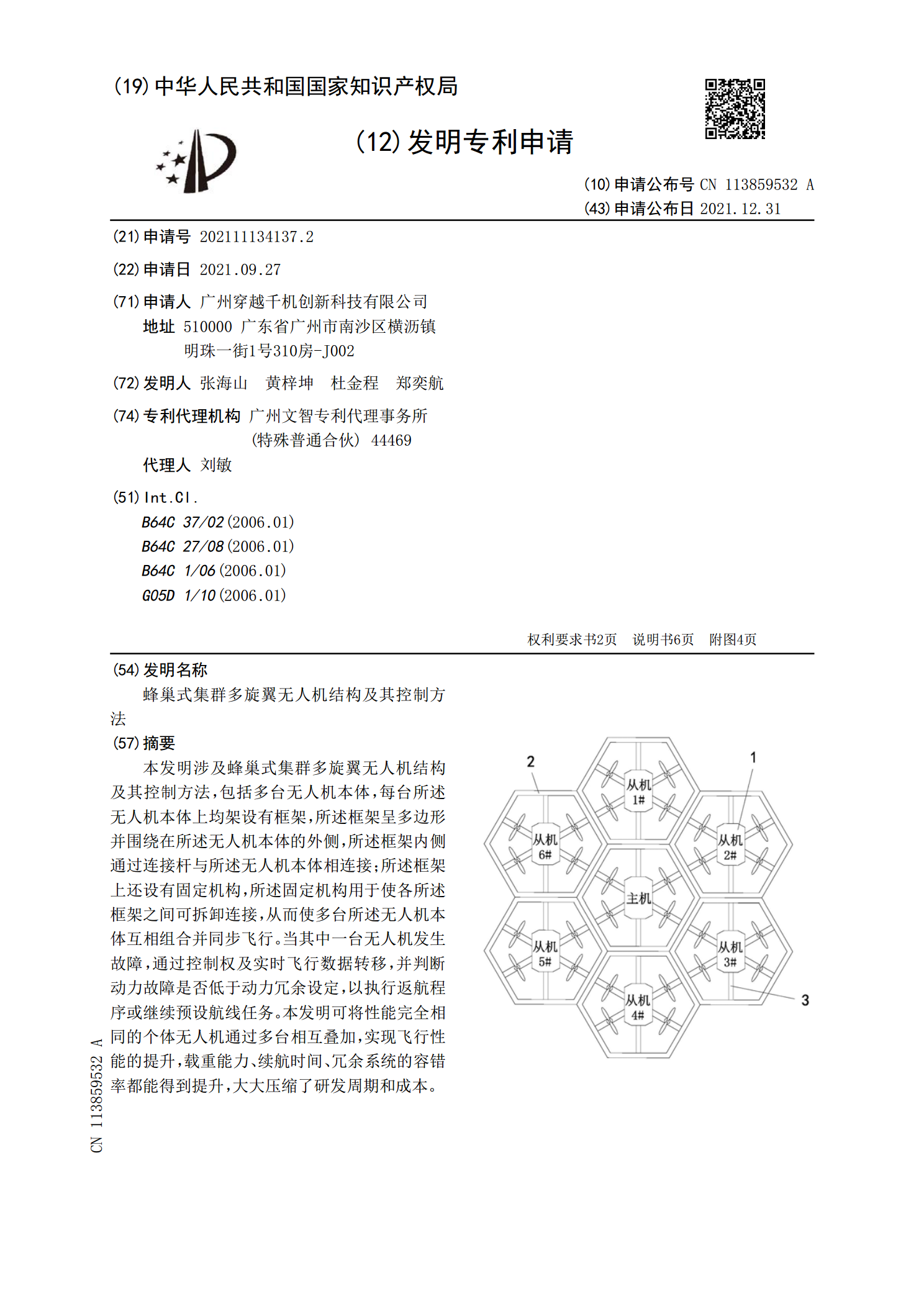
本发明涉及蜂巢式集群多旋翼无人机结构及其控制方法,包括多台无人机本体,每台所述无人机本体上均架设有框架,所述框架呈多边形并围绕在所述无人机本体的外侧,所述框架内侧通过连接杆与所述无人机本体相连接;所述框架上还设有固定机构,所述固定机构用于使各所述框架之间可拆卸连接,从而使多台所述无人机本体互相组合并同步飞行。当其中一台无人机发生故障,通过控制权及实时飞行数据转移,并判断动力故障是否低于动力冗余设定,以执行返航程序或继续预设航线任务。本发明可将性能完全相同的个体无人机通过多台相互叠加,实现飞行性能的提升,载

多旋翼无人机飞行控制方法讲解.docx
多旋翼无人机飞行控制方法讲解多旋翼无人机飞行控制方法讲解为了克服某些线性控制方法的限制,一些非线性的控制方法被提出并且被运用到飞行器的控制中。下面是小编为大家分享多旋翼无人机飞行控制方法讲解,欢迎大家阅读浏览。1线性飞行控制方法常规的飞行器控制方法以及早期的对飞行器控制的尝试都是建立在线性飞行控制理论上的,这其中就又有诸如PID、H∞、LQR以及增益调度法。1.PIDPID控制属于传统控制方法,是目前最成功、用的最广泛的控制方法之一。其控制方法简单,无需前期建模工作,参数物理意义明确,适用于飞
一种民用多旋翼无人机及其控制、调度方法.pdf
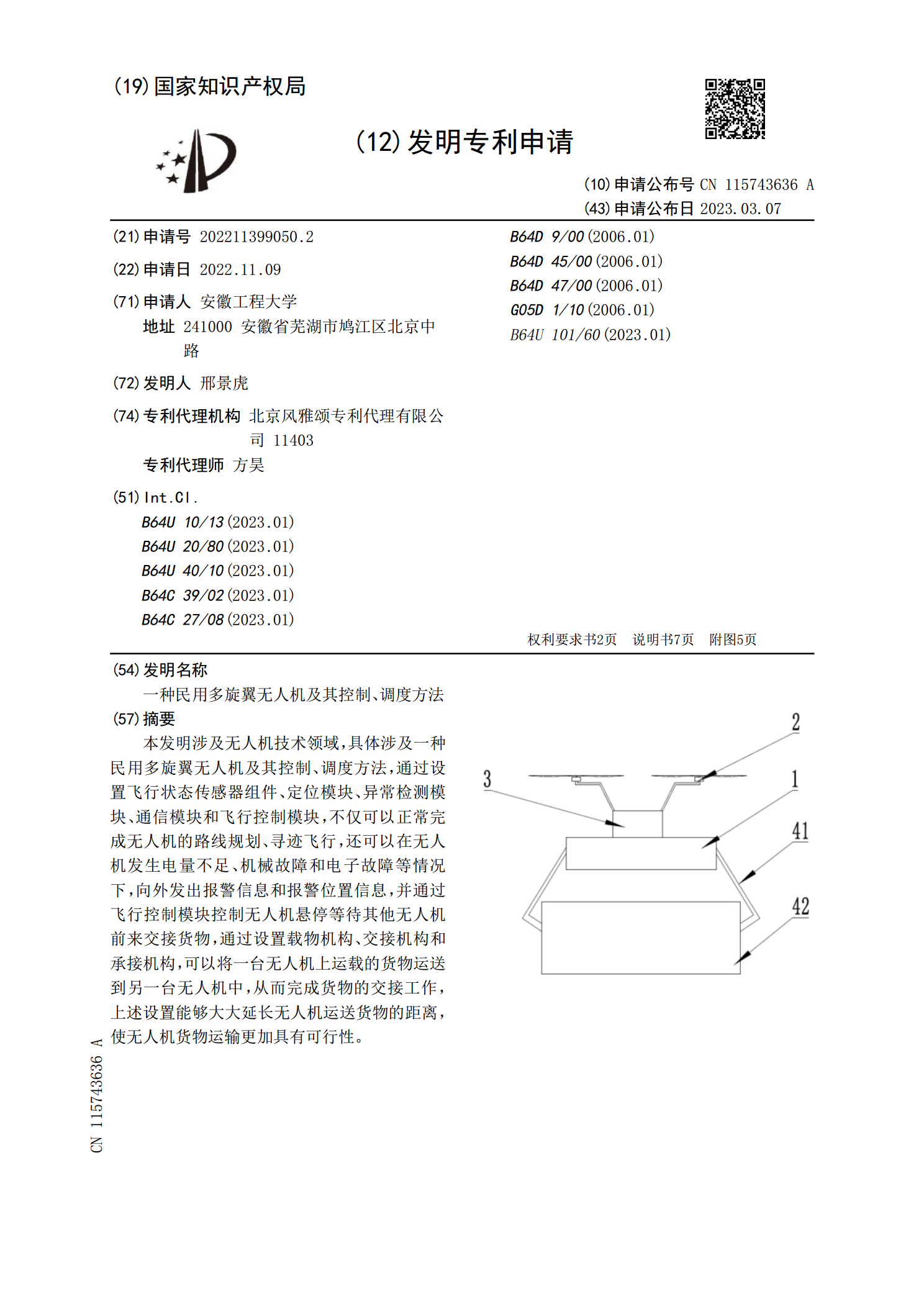
本发明涉及无人机技术领域,具体涉及一种民用多旋翼无人机及其控制、调度方法,通过设置飞行状态传感器组件、定位模块、异常检测模块、通信模块和飞行控制模块,不仅可以正常完成无人机的路线规划、寻迹飞行,还可以在无人机发生电量不足、机械故障和电子故障等情况下,向外发出报警信息和报警位置信息,并通过飞行控制模块控制无人机悬停等待其他无人机前来交接货物,通过设置载物机构、交接机构和承接机构,可以将一台无人机上运载的货物运送到另一台无人机中,从而完成货物的交接工作,上述设置能够大大延长无人机运送货物的距离,使无人机货物运
防伤人多旋翼无人机及其控制方法.pdf
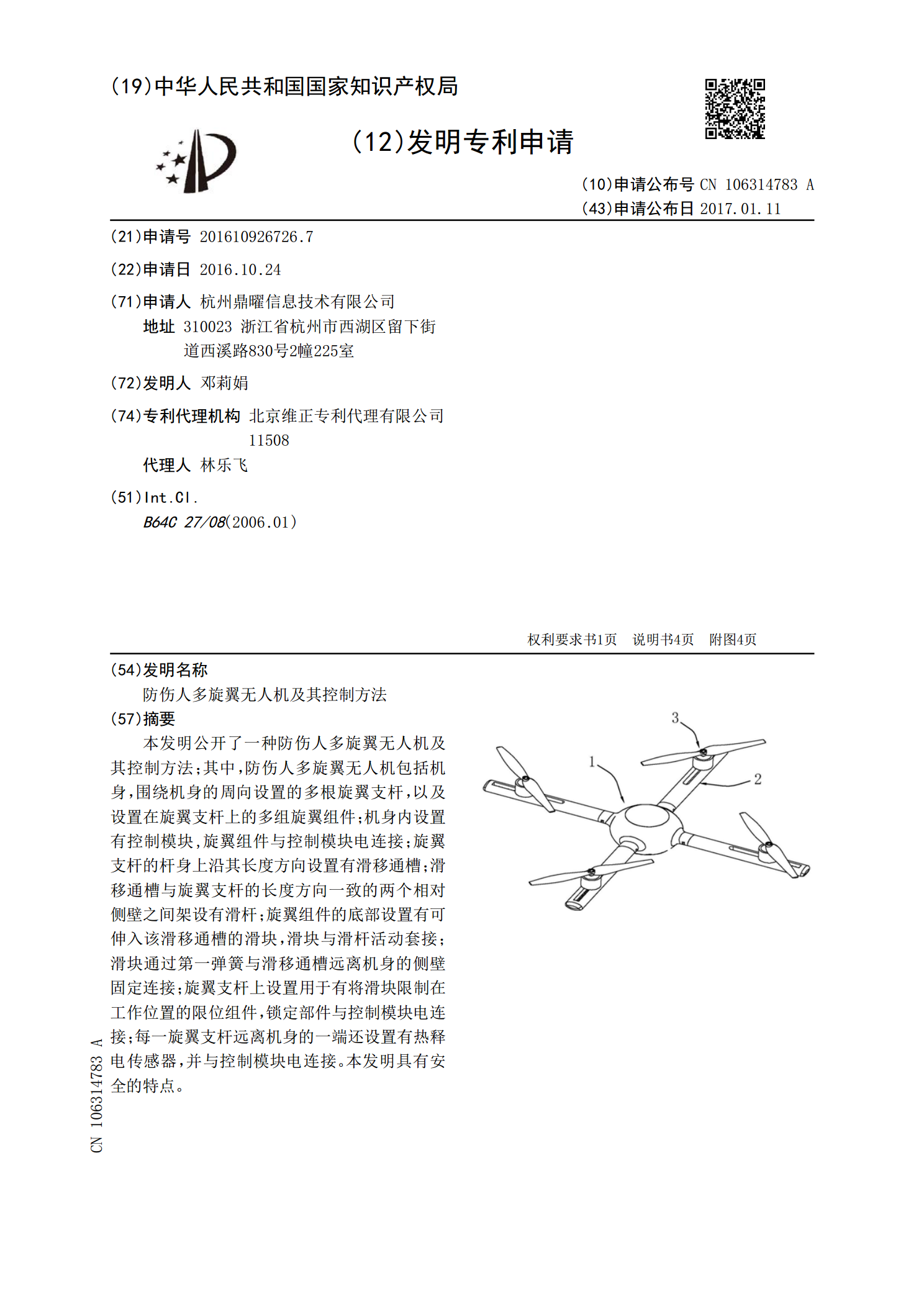
本发明公开了一种防伤人多旋翼无人机及其控制方法;其中,防伤人多旋翼无人机包括机身,围绕机身的周向设置的多根旋翼支杆,以及设置在旋翼支杆上的多组旋翼组件;机身内设置有控制模块,旋翼组件与控制模块电连接;旋翼支杆的杆身上沿其长度方向设置有滑移通槽;滑移通槽与旋翼支杆的长度方向一致的两个相对侧壁之间架设有滑杆;旋翼组件的底部设置有可伸入该滑移通槽的滑块,滑块与滑杆活动套接;滑块通过第一弹簧与滑移通槽远离机身的侧壁固定连接;旋翼支杆上设置用于有将滑块限制在工作位置的限位组件,锁定部件与控制模块电连接;每一旋翼支杆