
高超声速风洞虚拟飞行试验系统及试验方法.pdf

雨巷****珺琦


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高超声速风洞虚拟飞行试验系统及试验方法.pdf
高超声速风洞虚拟飞行试验系统及试验方法,系统包括飞行器模型、舵控模块、测量模块、多自由度支撑机构、舵机组件、舵、支杆、限位保护机构;舵控模块、测量模块和舵机组件均安装于飞行器模型内腔,舵机组件与舵直连;多自由度支撑机构具有一个固定端、一个运动端,运动端能够相对固定端实现多自由度转动,所述的固定端与支杆同轴且刚性连接,运动端与飞行器模型刚性连接;限位保护机构安装在支杆上用于对飞行器模型进行限位保护;利用所述测量模块测量的试验过程中飞行器模型的运动轨迹,通过舵控模块控制舵按给定规律偏转。

风洞虚拟飞行试验的飞行控制系统及方法.pdf
本发明是一种风洞虚拟飞行试验的飞行控制系统及方法,属于风洞虚拟飞行试验领域,目的是解决识别模型偏航角,功能单一,无法满足复杂的风洞试验需求等问题。该系统由可编程自动驾驶仪、遥控器接收机、遥控器、电源、适配电路、电台、陀螺仪、编码器、飞行控制程序等构成,通过三自由度支撑装置与模型支杆连接,以及飞行控制装置按照控制律及控制程序控制模型舵面,实现模型姿态和姿态角速度测量,同时实现设备与外部计算机的无线通讯,省去操作人员的现场手动作业,降低风洞模拟飞行试验中飞行器的控制难度,提高控制效率,解决了开发板尺寸较大,占

高超声速风洞压敏漆试验技术.docx
高超声速风洞压敏漆试验技术高超声速风洞压敏漆试验技术摘要本文主要介绍了高超声速风洞压敏漆试验技术的发展历程、原理和应用前景。随着航空航天技术的发展,高超声速技术逐渐成为研究的焦点,其中压敏漆试验技术在高超声速试验中起着十分重要的作用。本文系统阐述了压敏漆试验技术的原理、适用范围以及其在航空航天领域中的应用,为高超声速试验提供了一定的参考和指导。关键词:高超声速风洞;压敏漆;试验技术;应用AbstractThisarticlemainlyintroducesthedevelopmenthistory,pri
用于高超声速风洞的反向喷流堵塞度试验装置及试验方法.pdf
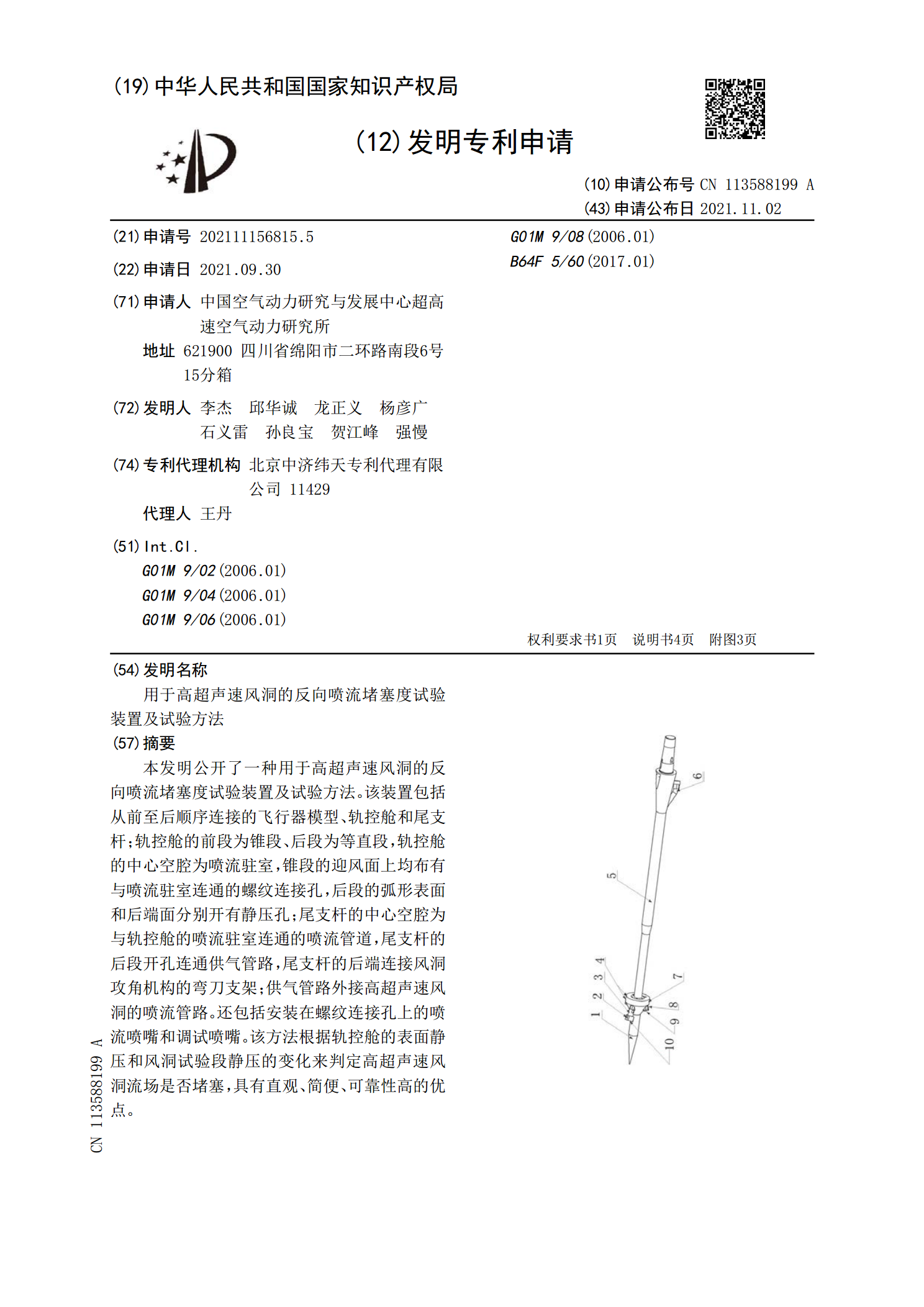
本发明公开了一种用于高超声速风洞的反向喷流堵塞度试验装置及试验方法。该装置包括从前至后顺序连接的飞行器模型、轨控舱和尾支杆;轨控舱的前段为锥段、后段为等直段,轨控舱的中心空腔为喷流驻室,锥段的迎风面上均布有与喷流驻室连通的螺纹连接孔,后段的弧形表面和后端面分别开有静压孔;尾支杆的中心空腔为与轨控舱的喷流驻室连通的喷流管道,尾支杆的后段开孔连通供气管路,尾支杆的后端连接风洞攻角机构的弯刀支架;供气管路外接高超声速风洞的喷流管路。还包括安装在螺纹连接孔上的喷流喷嘴和调试喷嘴。该方法根据轨控舱的表面静压和风洞试

高超声速飞行器后体推减阻高速风洞试验技术.pptx
,目录PartOne技术背景和意义技术发展历程技术原理和特点PartTwo高速风洞试验概述风洞试验设备试验方法和流程试验数据处理和分析PartThree应用场景和试验要求试验方案设计试验过程和结果分析技术优势和局限性PartFour技术发展趋势和方向技术创新和突破点技术推广和应用前景PartFive技术总结和评价对未来研究的建议和展望THANKS