
一种应急救援破拆机器人.pdf

努力****幻翠

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种应急救援破拆机器人.pdf
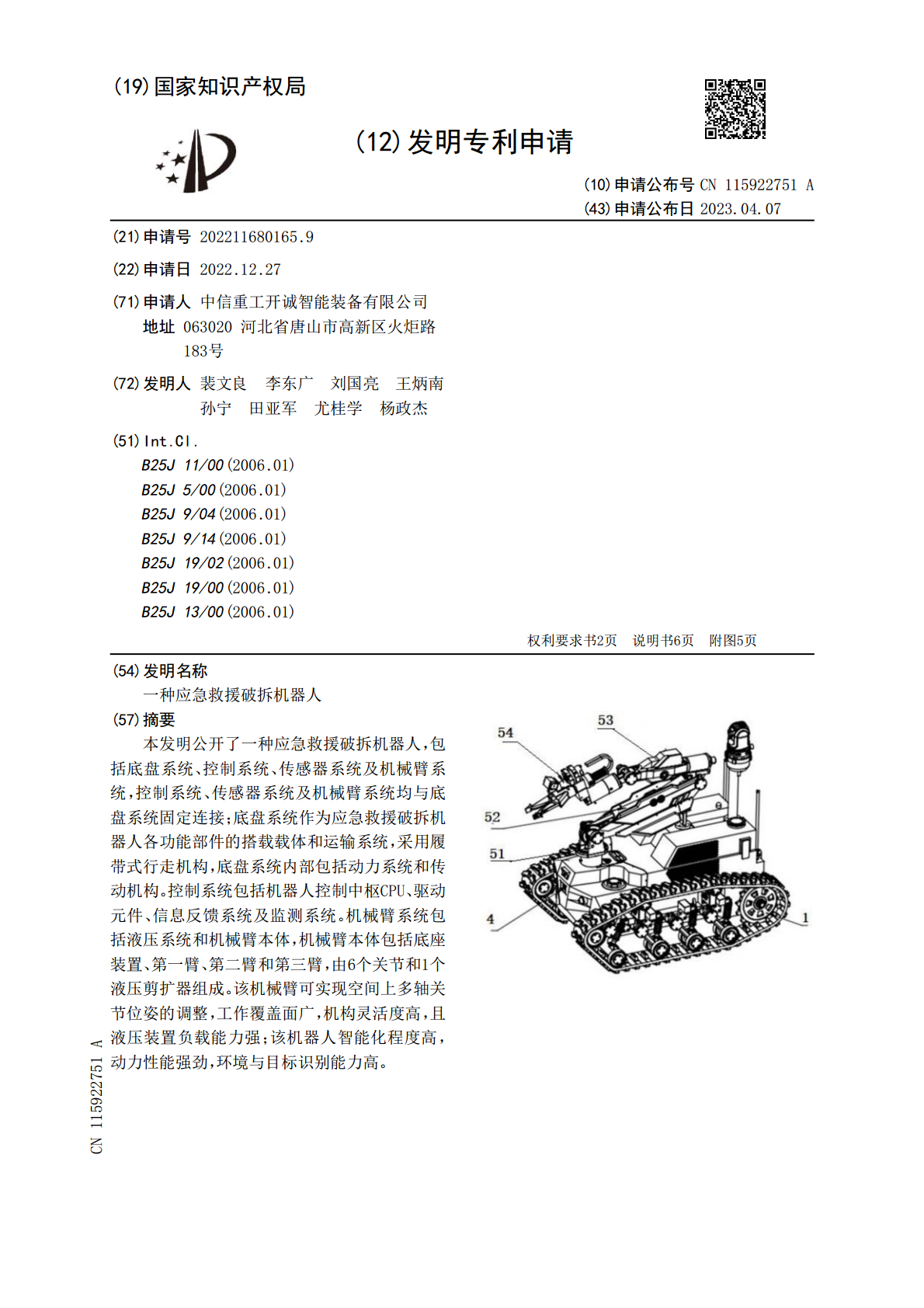
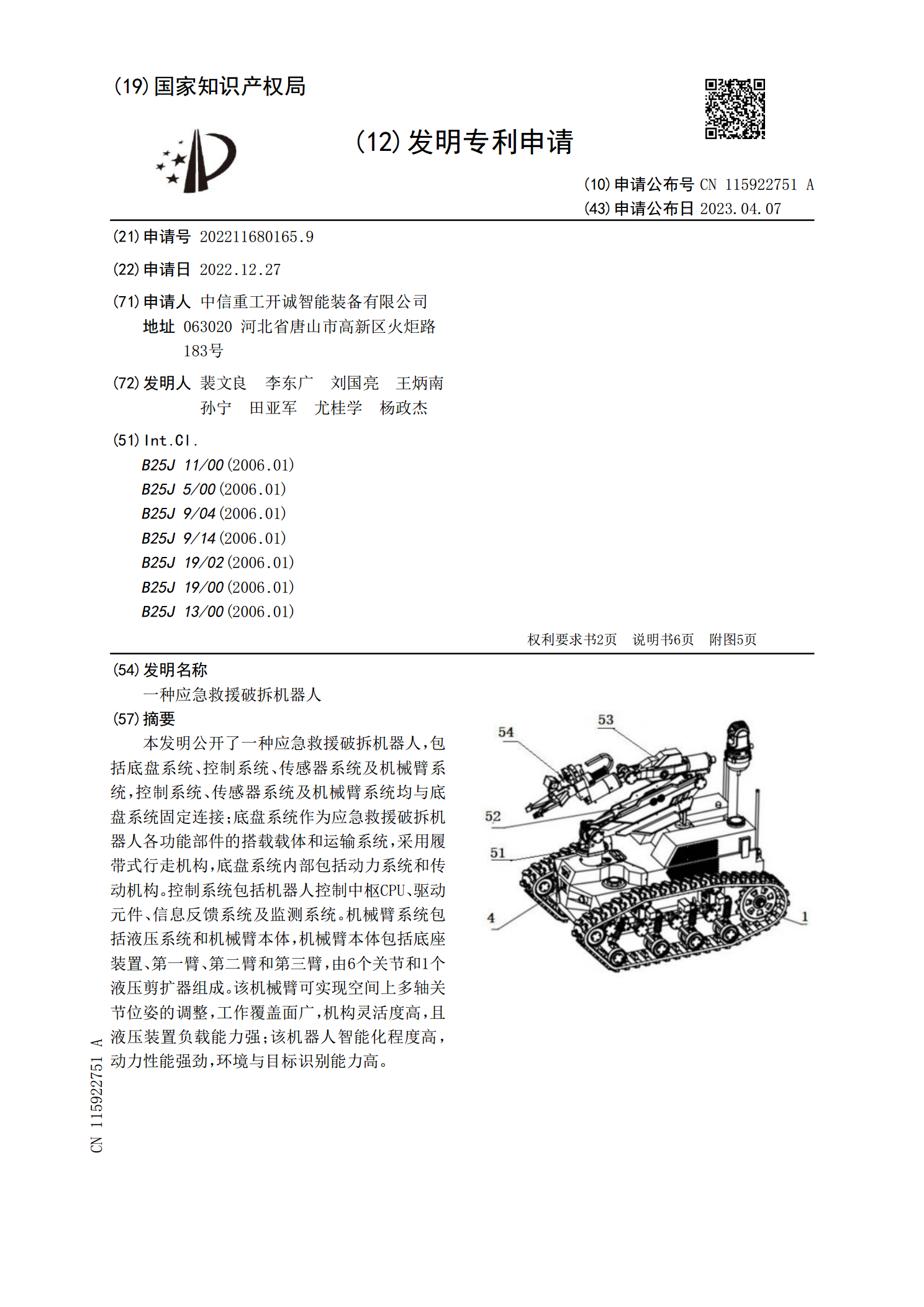
本发明公开了一种应急救援破拆机器人,包括底盘系统、控制系统、传感器系统及机械臂系统,控制系统、传感器系统及机械臂系统均与底盘系统固定连接;底盘系统作为应急救援破拆机器人各功能部件的搭载载体和运输系统,采用履带式行走机构,底盘系统内部包括动力系统和传动机构。控制系统包括机器人控制中枢CPU、驱动元件、信息反馈系统及监测系统。机械臂系统包括液压系统和机械臂本体,机械臂本体包括底座装置、第一臂、第二臂和第三臂,由6个关节和1个液压剪扩器组成。该机械臂可实现空间上多轴关节位姿的调整,工作覆盖面广,机构灵活度高,且

一种应急救援多功能机械臂破拆车.pdf
本实用新型公开了一种应急救援多功能机械臂破拆车,包括车体、固定件和旋转盘,所述车体的左侧固定有固定件,所述固定件的顶部活动设置有旋转盘,所述固定件的内部固定有第一旋转驱动件,所述第一旋转驱动件的输出端与旋转盘相互连接,所述旋转盘的顶部固定有连接块,所述连接块上通过轴活动设置有支撑板,所述旋转盘顶部的一侧通过轴活动设置有伸缩驱动件,所述伸缩驱动件的一端通过轴连接到支撑板上,所述支撑板上通过滑轨滑动设置有破拆器,所述破拆器的一侧设置有破拆头,所述支撑板的一端固定有第二旋转驱动件,本实用新型通过启动破拆器,破拆

基于前混合磨料射流的水下破拆救援机器人的研究.docx
基于前混合磨料射流的水下破拆救援机器人的研究基于前混合磨料射流的水下破拆救援机器人的研究摘要:随着现代水下作业和救援需求的增加,水下破拆救援机器人的研究变得越来越重要。本文研究了一种基于前混合磨料射流的水下破拆救援机器人。该机器人采用了先进的磨料射流技术,具有高效率、精准性和安全性。通过对机器人的设计、控制系统以及实验验证等方面的研究,证明该机器人具有良好的应用前景和广泛的应用空间。关键词:水下机器人,破拆救援,前混合磨料射流,设计,控制系统1.引言随着海洋开发和水下作业的增加,对水下破拆救援技术的需求也
一种消防救援用的彩钢板破拆设备.pdf
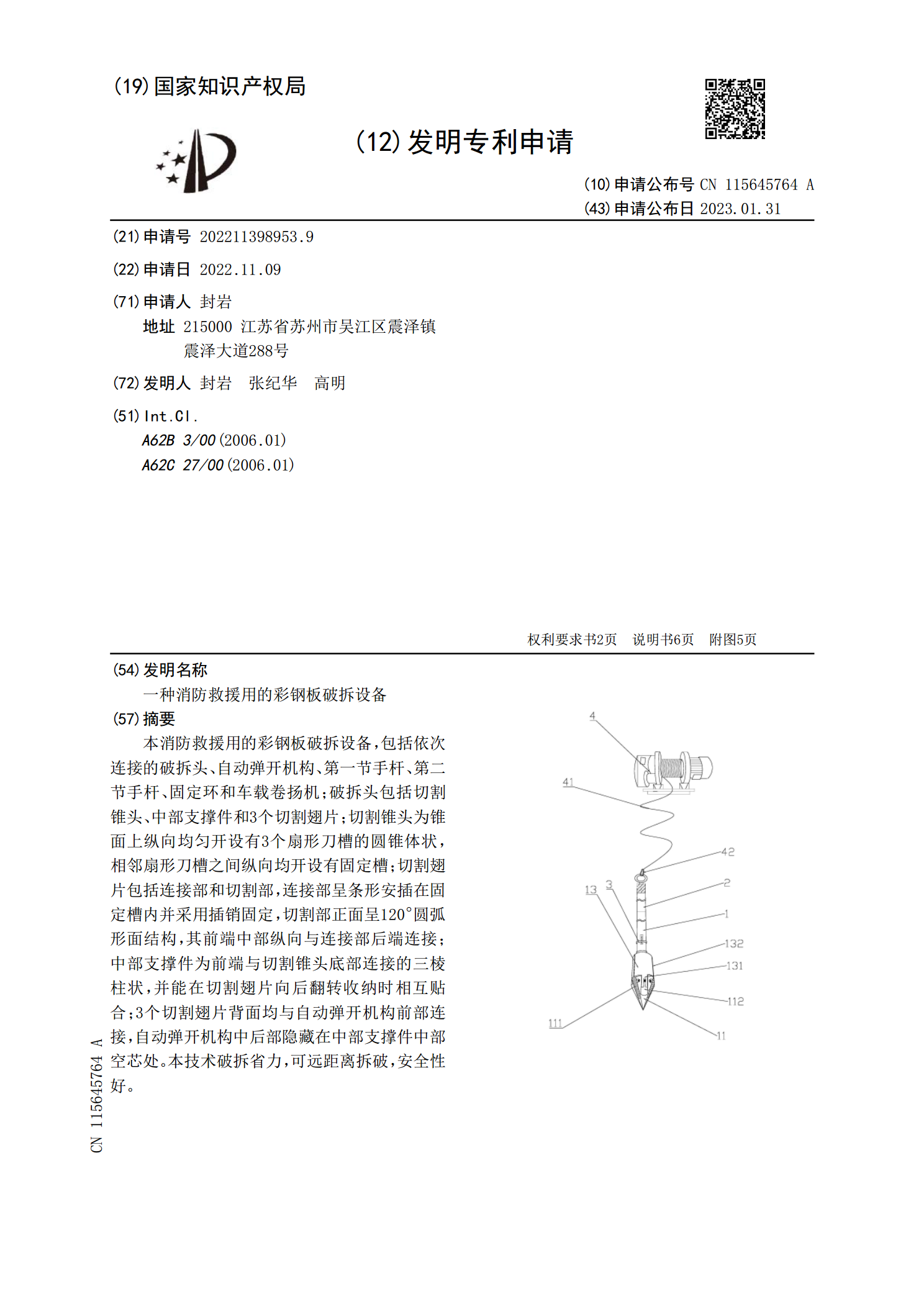
本消防救援用的彩钢板破拆设备,包括依次连接的破拆头、自动弹开机构、第一节手杆、第二节手杆、固定环和车载卷扬机;破拆头包括切割锥头、中部支撑件和3个切割翅片;切割锥头为锥面上纵向均匀开设有3个扇形刀槽的圆锥体状,相邻扇形刀槽之间纵向均开设有固定槽;切割翅片包括连接部和切割部,连接部呈条形安插在固定槽内并采用插销固定,切割部正面呈120°圆弧形面结构,其前端中部纵向与连接部后端连接;中部支撑件为前端与切割锥头底部连接的三棱柱状,并能在切割翅片向后翻转收纳时相互贴合;3个切割翅片背面均与自动弹开机构前部连接,自

一种建筑破拆绳锯机器人.pdf
本发明涉及建筑废弃构件破拆技术领域,且公开了一种建筑破拆绳锯机器人,包括底座,所述底座上设有行走机构,所述底座上设有支撑板,所述支撑板上设有绳锯切割组件,所述绳锯切割组件上设有机器人位置校准组件,所述机器人位置校准组件包括设在绳锯切割组件上的固定块,所述固定块上沿切割方向阻尼滑动设有插杆,所述插杆一端连接有连接块,所述连接块侧面对称设有两组第一压力传感器,还包括手持控制终端。该建筑破拆绳锯机器人能够通过设置的机器人位置校准组件,来保证锯绳切割方向与建筑物长度方向之间的垂直度足够高,从而保证了切割长度最短,