
基于多普勒参数估计的机载SAR动目标成像方法.pdf

St****12

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多普勒参数估计的机载SAR动目标成像方法.pdf
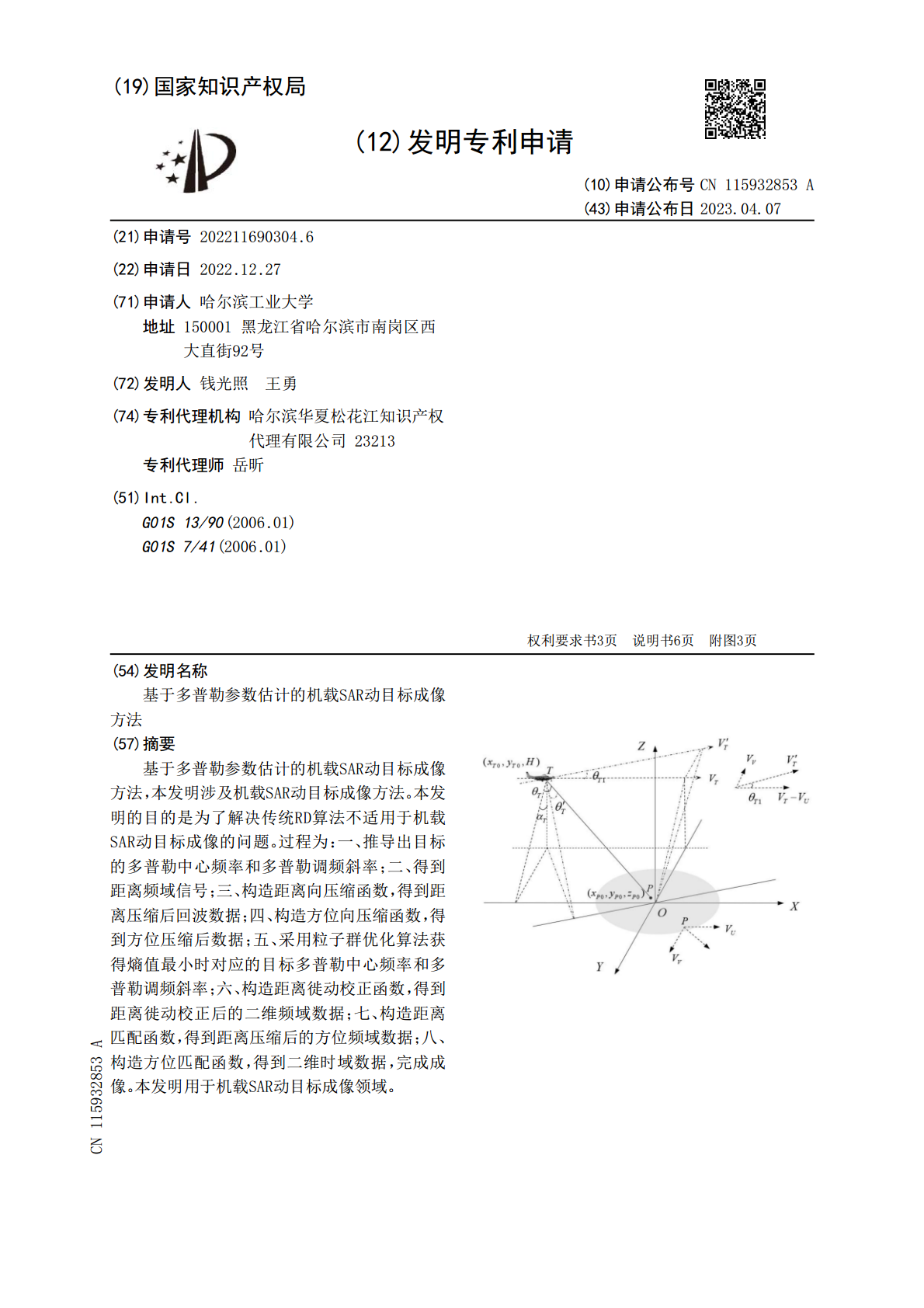
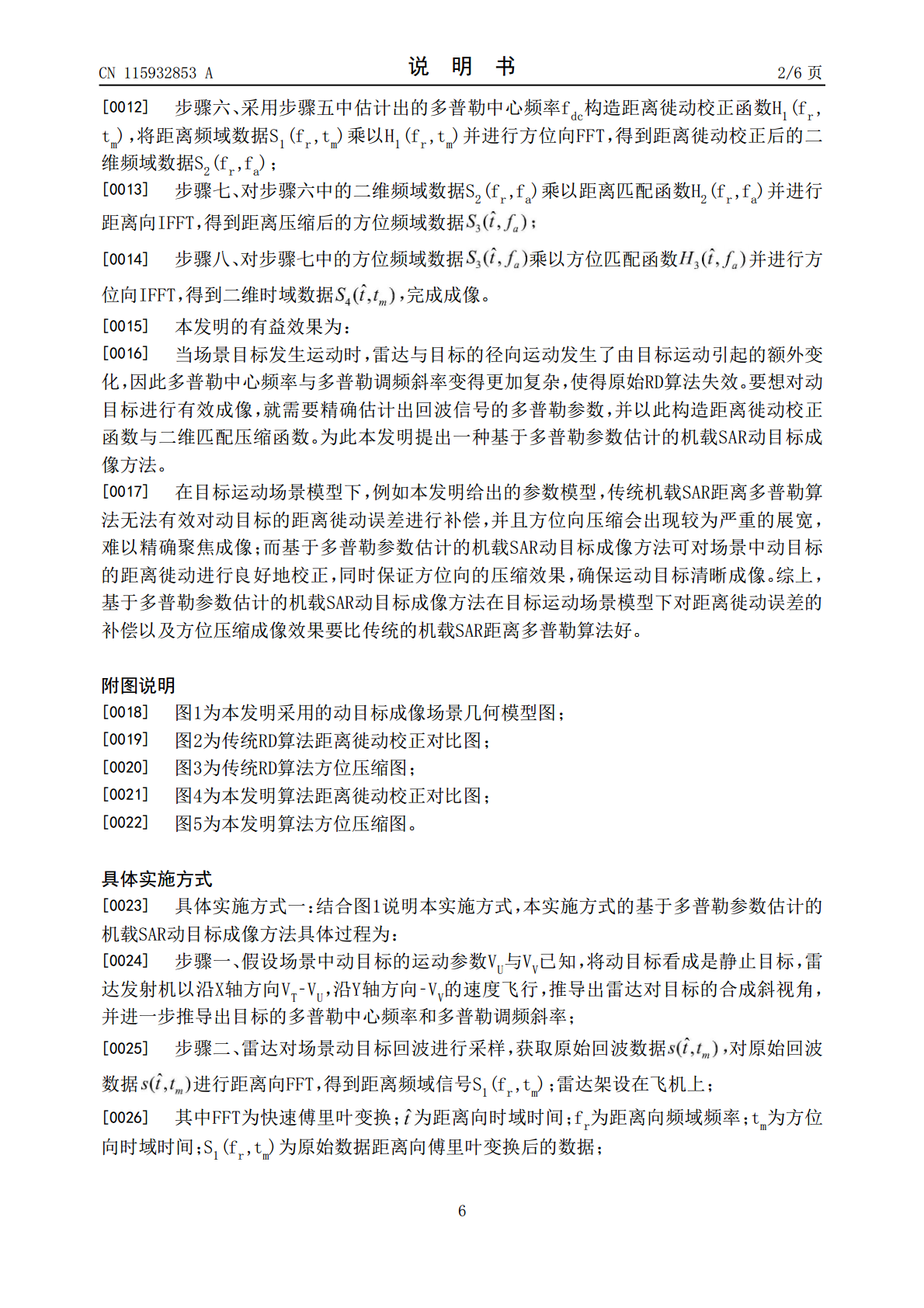
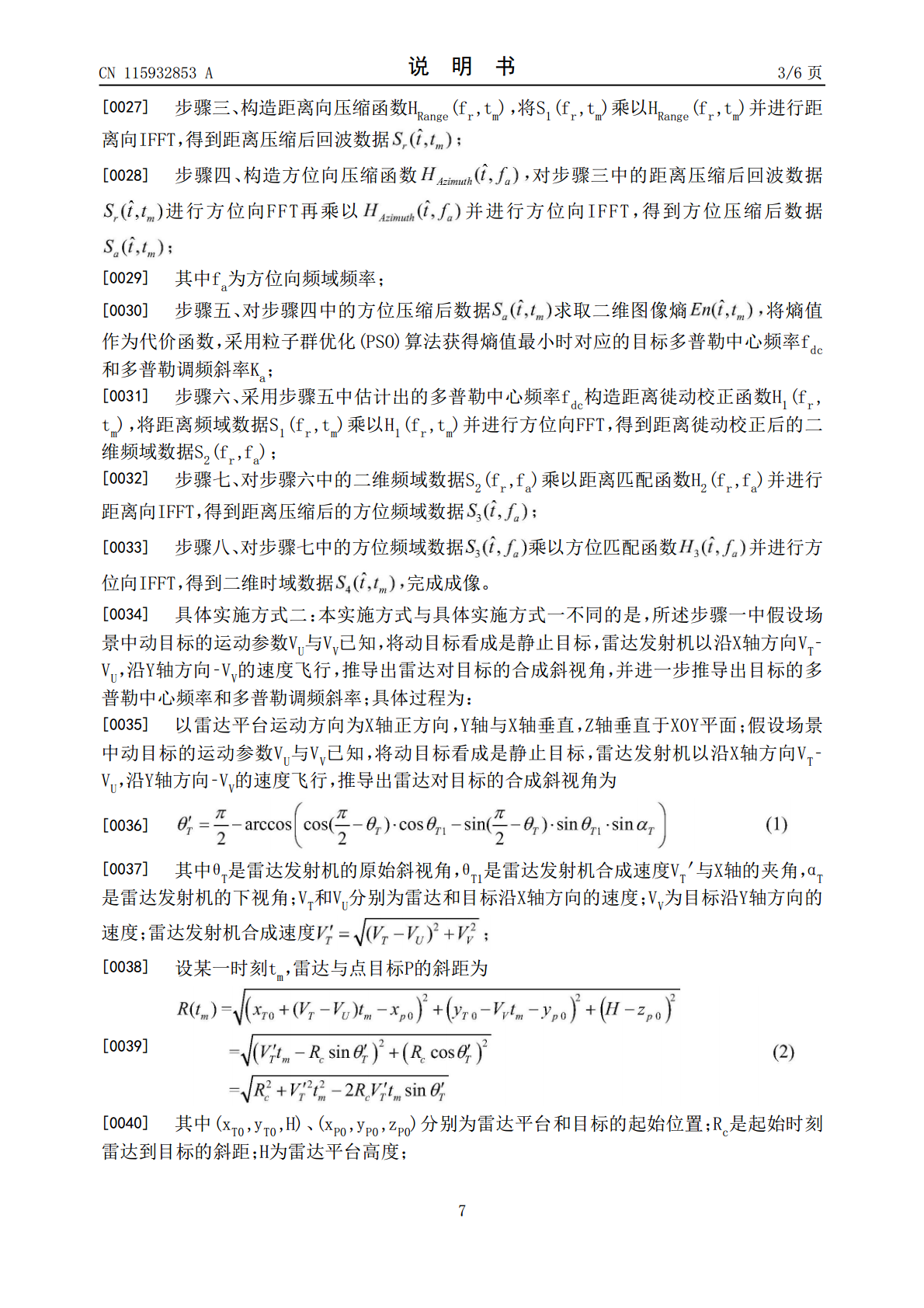
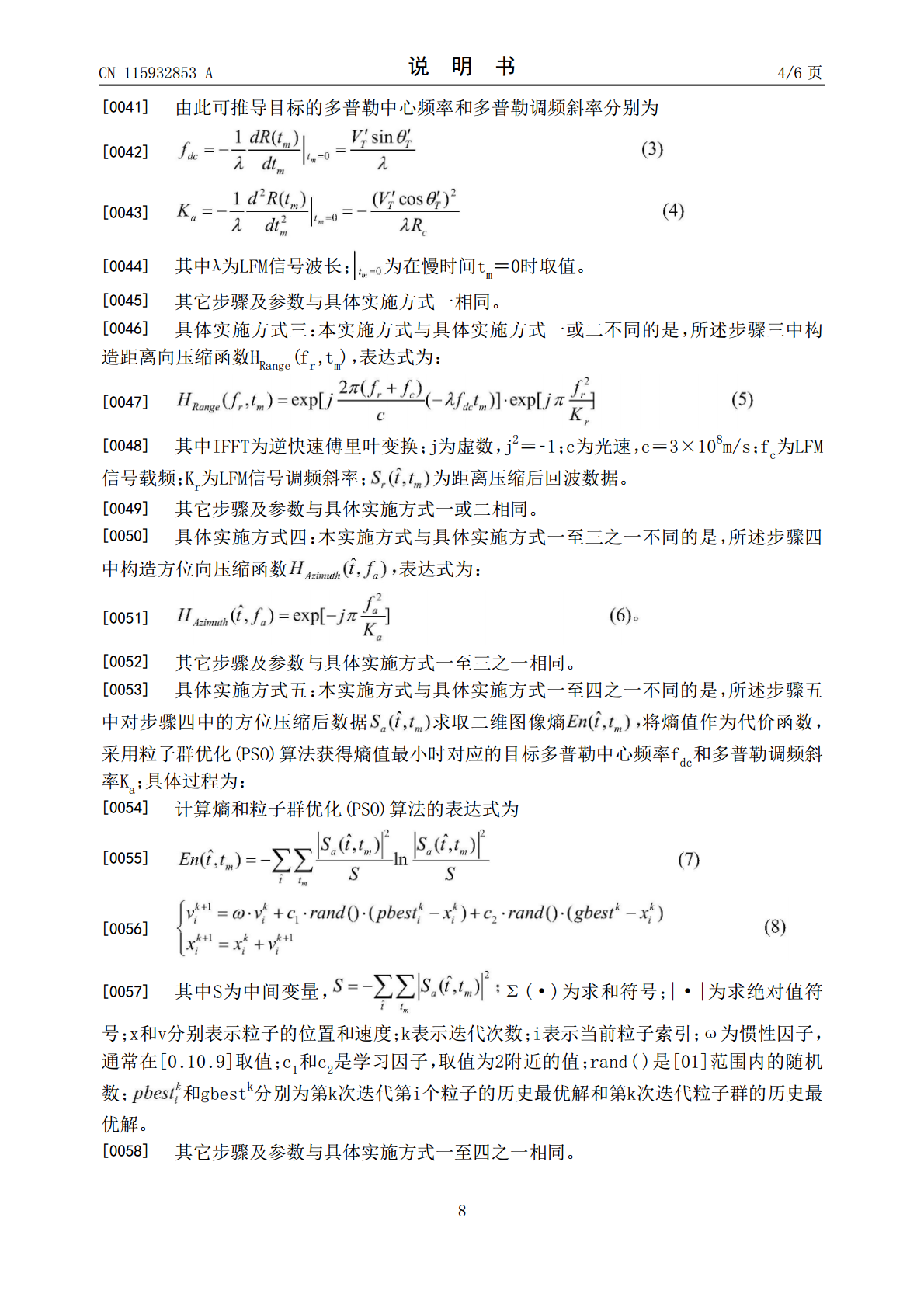
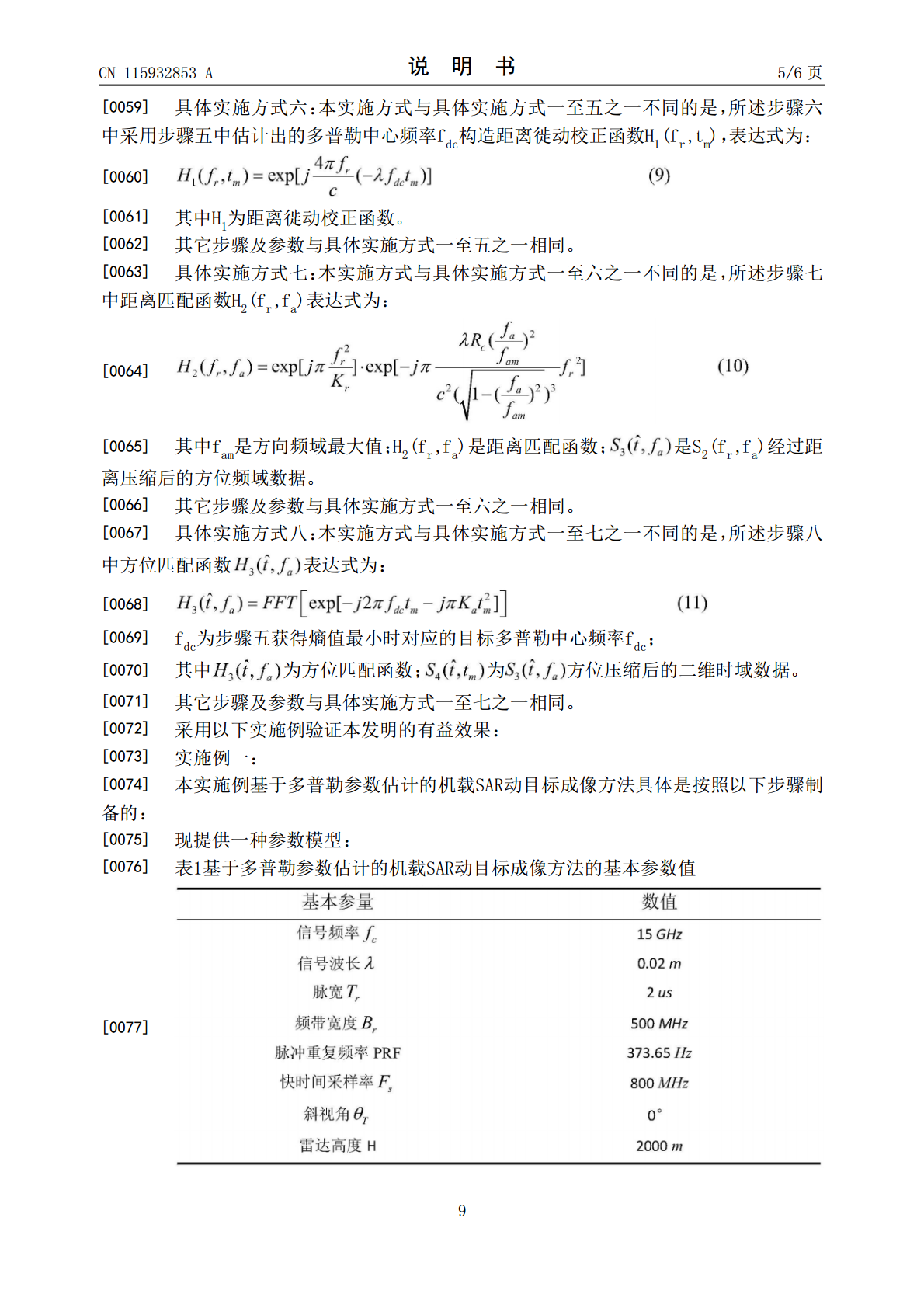
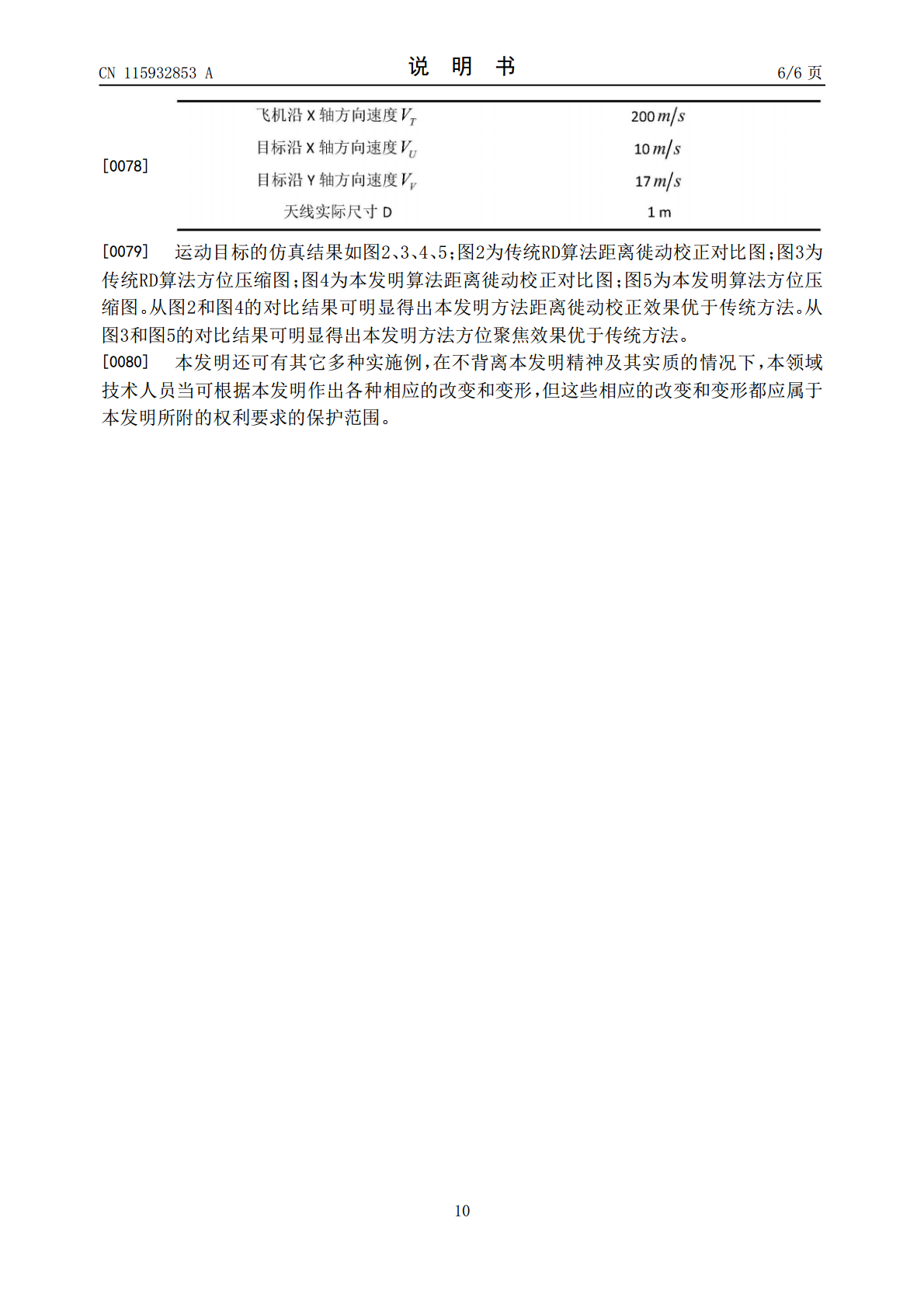
基于多普勒参数估计的机载SAR动目标成像方法,本发明涉及机载SAR动目标成像方法。本发明的目的是为了解决传统RD算法不适用于机载SAR动目标成像的问题。过程为:一、推导出目标的多普勒中心频率和多普勒调频斜率;二、得到距离频域信号;三、构造距离向压缩函数,得到距离压缩后回波数据;四、构造方位向压缩函数,得到方位压缩后数据;五、采用粒子群优化算法获得熵值最小时对应的目标多普勒中心频率和多普勒调频斜率;六、构造距离徙动校正函数,得到距离徙动校正后的二维频域数据;七、构造距离匹配函数,得到距离压缩后的方位频域数据
基于LVD参数估计的SAR动目标成像方法及系统.pdf
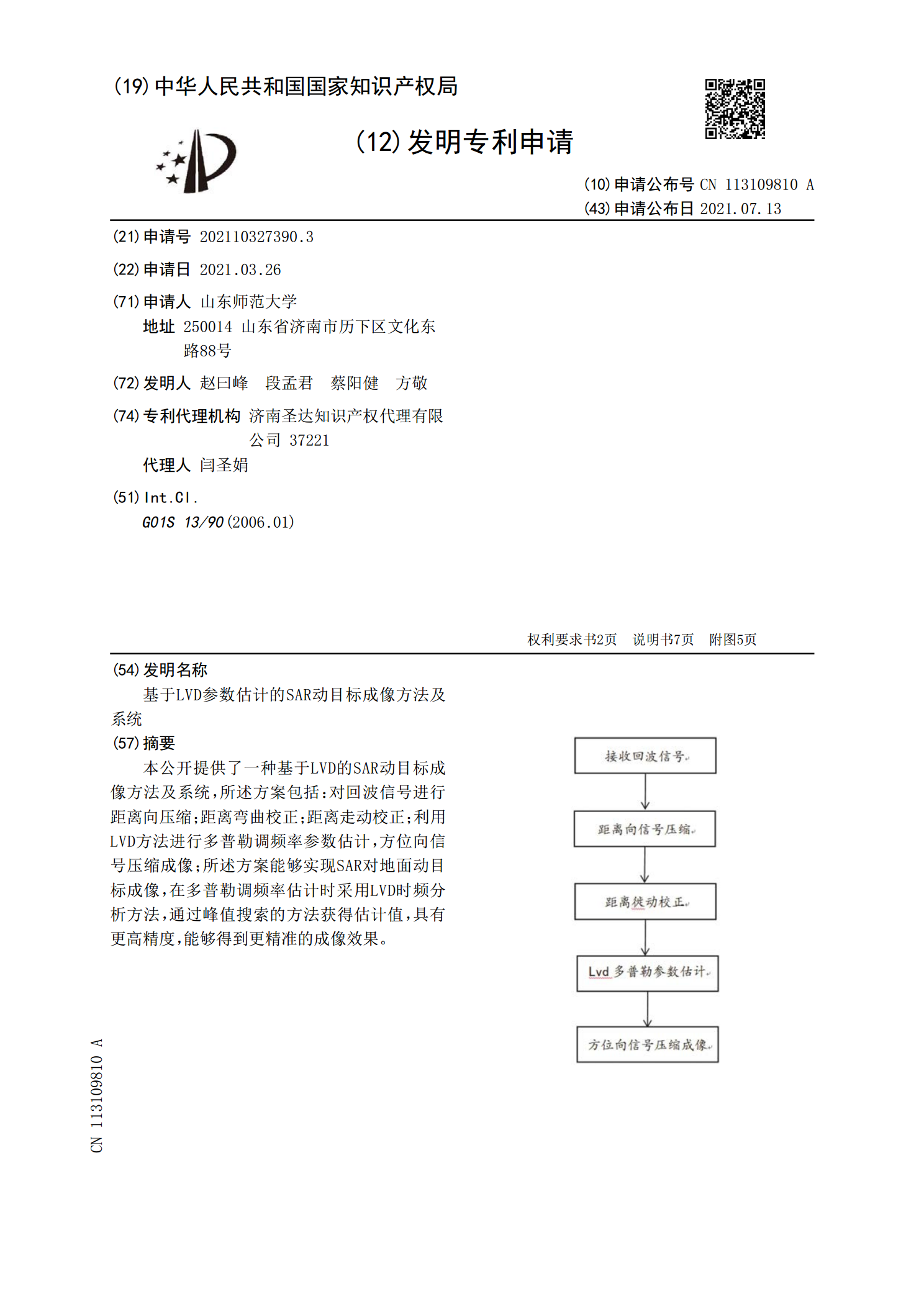
本公开提供了一种基于LVD的SAR动目标成像方法及系统,所述方案包括:对回波信号进行距离向压缩;距离弯曲校正;距离走动校正;利用LVD方法进行多普勒调频率参数估计,方位向信号压缩成像;所述方案能够实现SAR对地面动目标成像,在多普勒调频率估计时采用LVD时频分析方法,通过峰值搜索的方法获得估计值,具有更高精度,能够得到更精准的成像效果。

基于DPCA的多通道机载SAR动目标检测和参数估计方法.pptx
添加副标题目录PART01PART02DPCA基本概念DPCA在SAR图像处理中的应用DPCA的优势与局限性PART03多通道机载SAR系统概述多通道机载SAR系统的优势多通道机载SAR系统的数据处理流程PART04动目标检测方法概述基于DPCA的动目标检测原理基于DPCA的动目标检测实现流程基于DPCA的动目标检测实验结果与分析PART05参数估计方法概述基于DPCA的参数估计原理基于DPCA的参数估计实现流程基于DPCA的参数估计实验结果与分析PART06基于DPCA的多通道机载SAR动目标检测和参数

基于FrFT的机载SAR成像与动目标检测技术研究的任务书.docx
基于FrFT的机载SAR成像与动目标检测技术研究的任务书任务书一、题目:基于FrFT的机载SAR成像与动目标检测技术研究。二、任务背景和意义:合成孔径雷达(SAR)是一种通过天空中的微波信号反弹来获取地面图像的技术。SAR具有成像结果与地面光照条件无关、能够透过云层获取地面信息等优势,因此在许多领域得到了广泛应用。机载SAR系统可以快速获取大面积的地面图像,同时也可以用于动态目标检测与监测。然而,由于机载SAR系统受到飞行姿态等因素的影响,成像质量和动目标检测的有效性会受到一定限制。为了提高机载SAR的成

基于子孔径参数估计的SAR地面运动目标成像方法.pdf
本发明属于雷达技术领域,公开了基于子孔径参数估计的SAR地面运动目标成像方法。该方法包括:基于全孔径CPI内目标机动运动,子孔径CPI内目标匀速运动的假设,将原始回波数据分为子孔径回波数据并建立全孔径瞬时斜距模型与子孔径距离频域回波数据模型,估计子孔径回波数据参数,利用回波数据参数计算全孔径瞬时多普勒频率向量;利用全孔径瞬时斜距模型得到全孔径瞬时多普勒频率向量模型,将瞬时多普勒频率向量代入瞬时多普勒频率向量模型,求解待定系数,进而利用待定系数校正运动目标全孔径原始回波数据的高阶相位误差,从而大大提高了大斜