
一种智能垃圾分拣机器人.pdf

雨巷****莺莺

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种智能垃圾分拣机器人.pdf
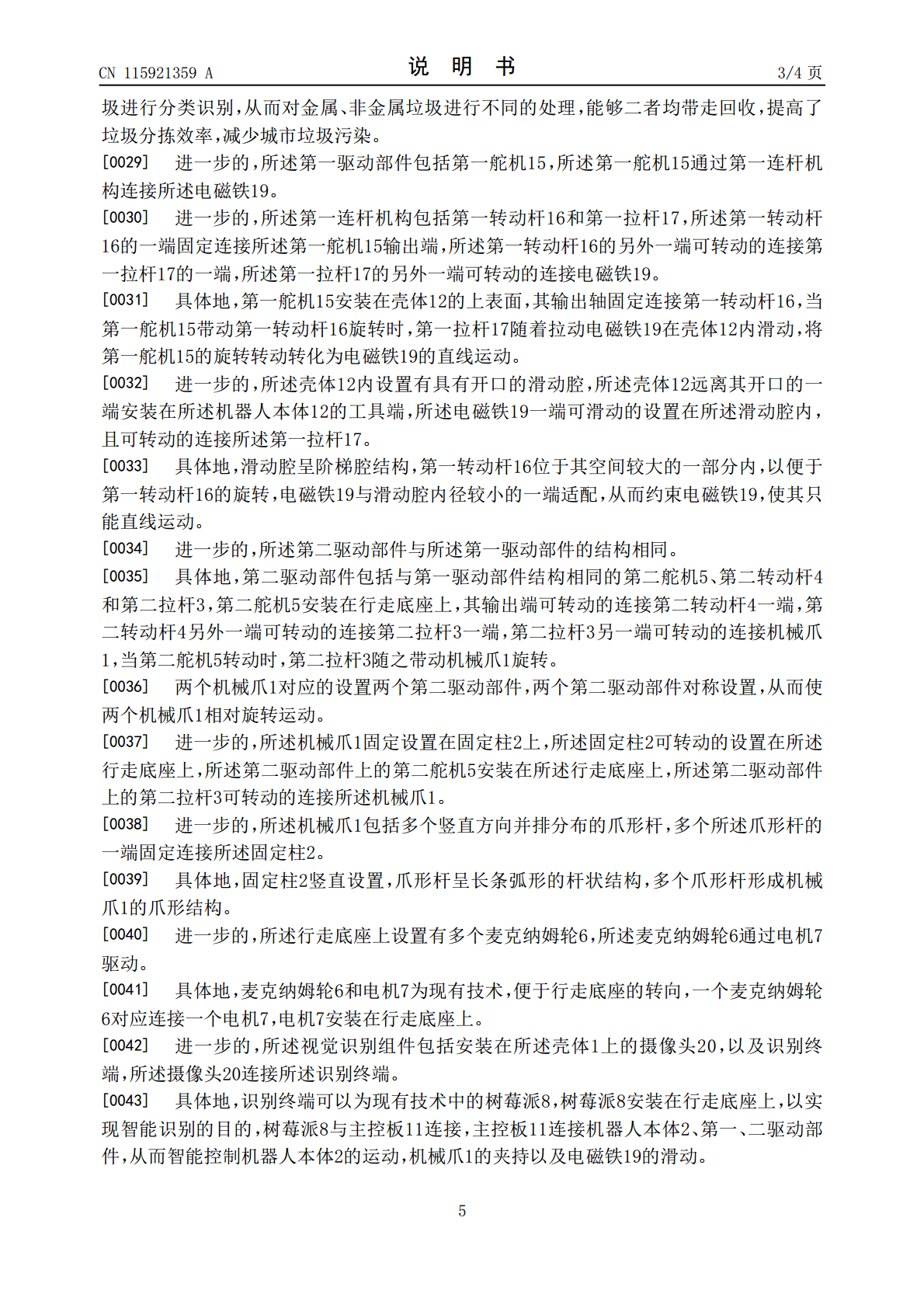
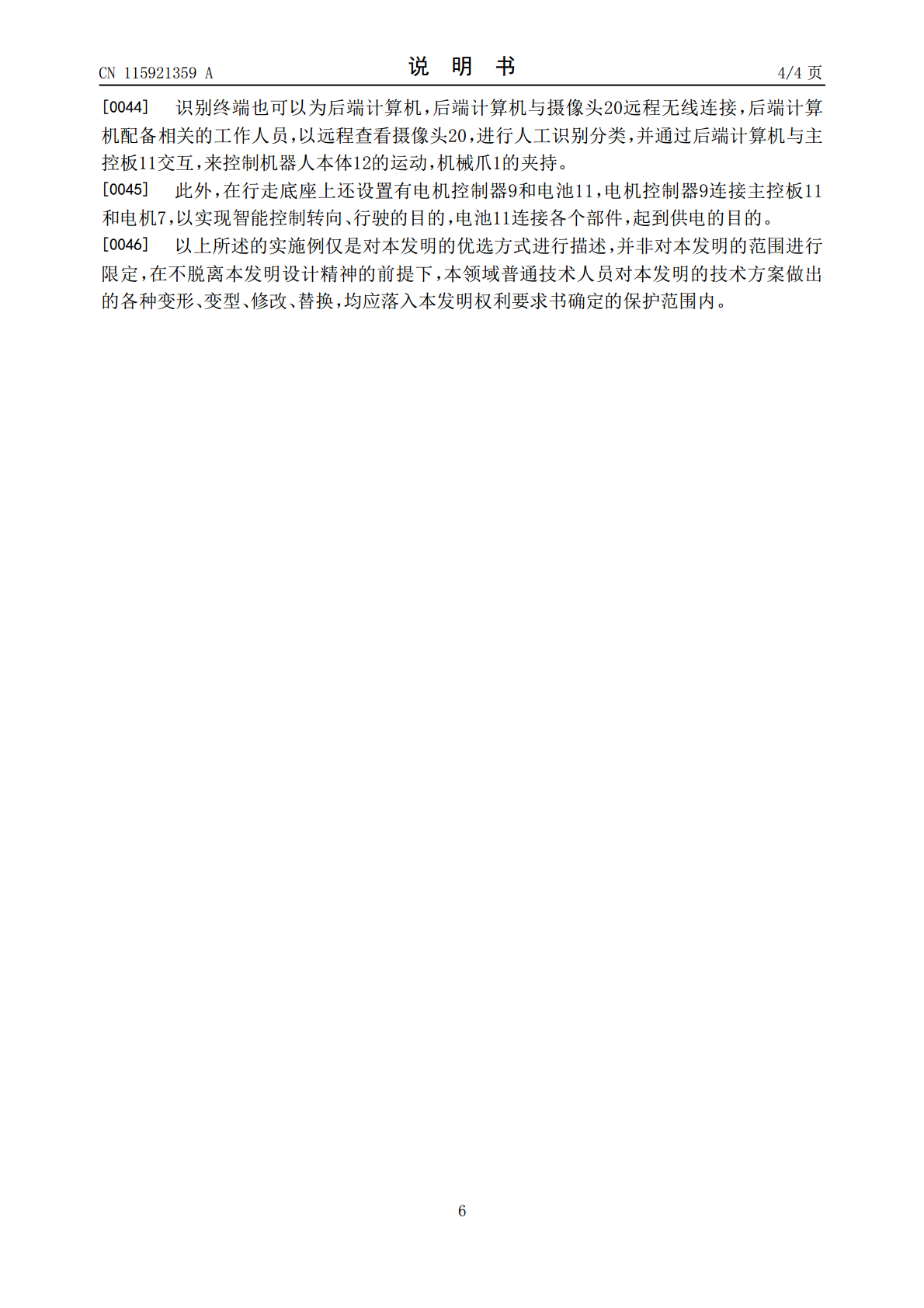
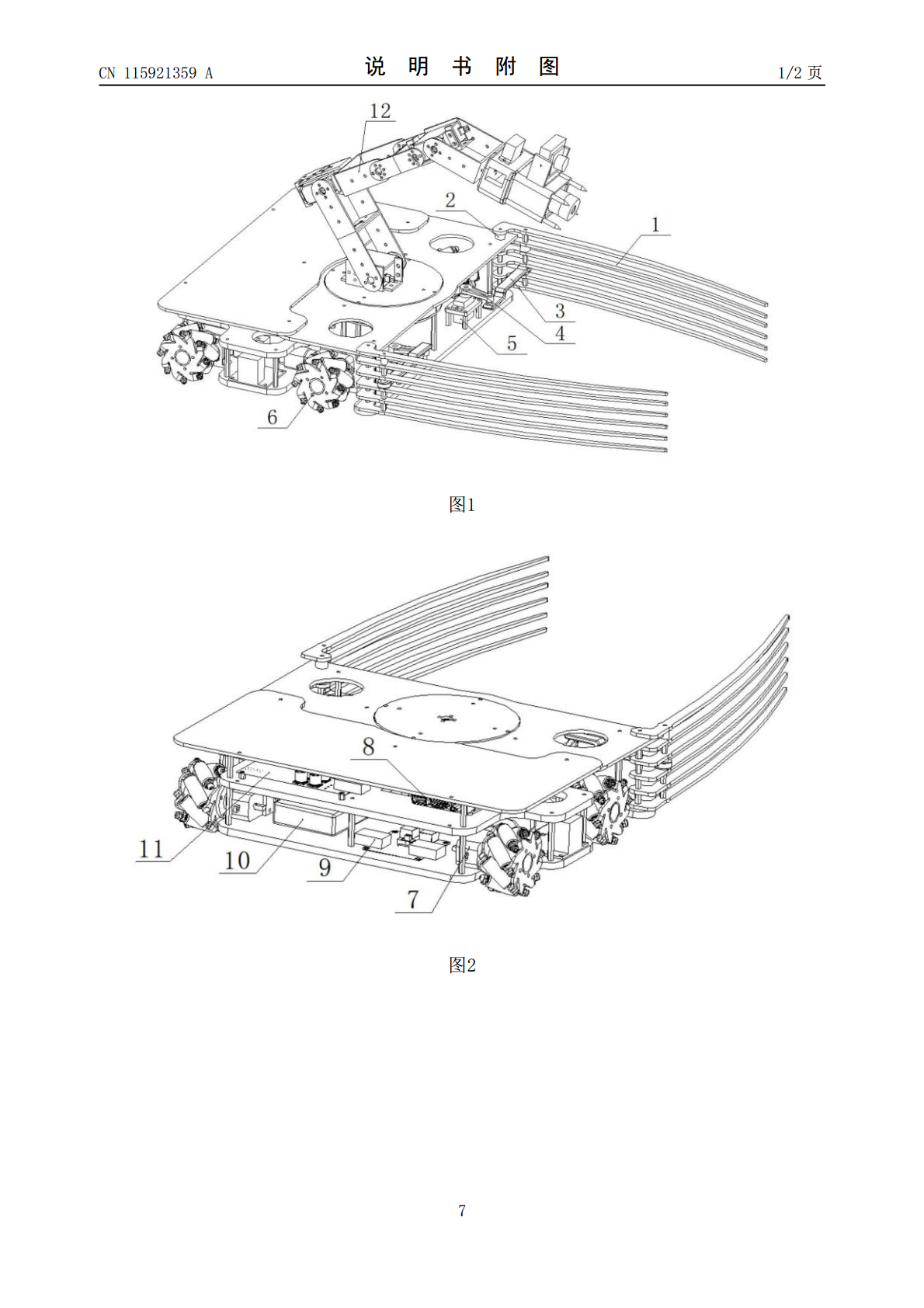
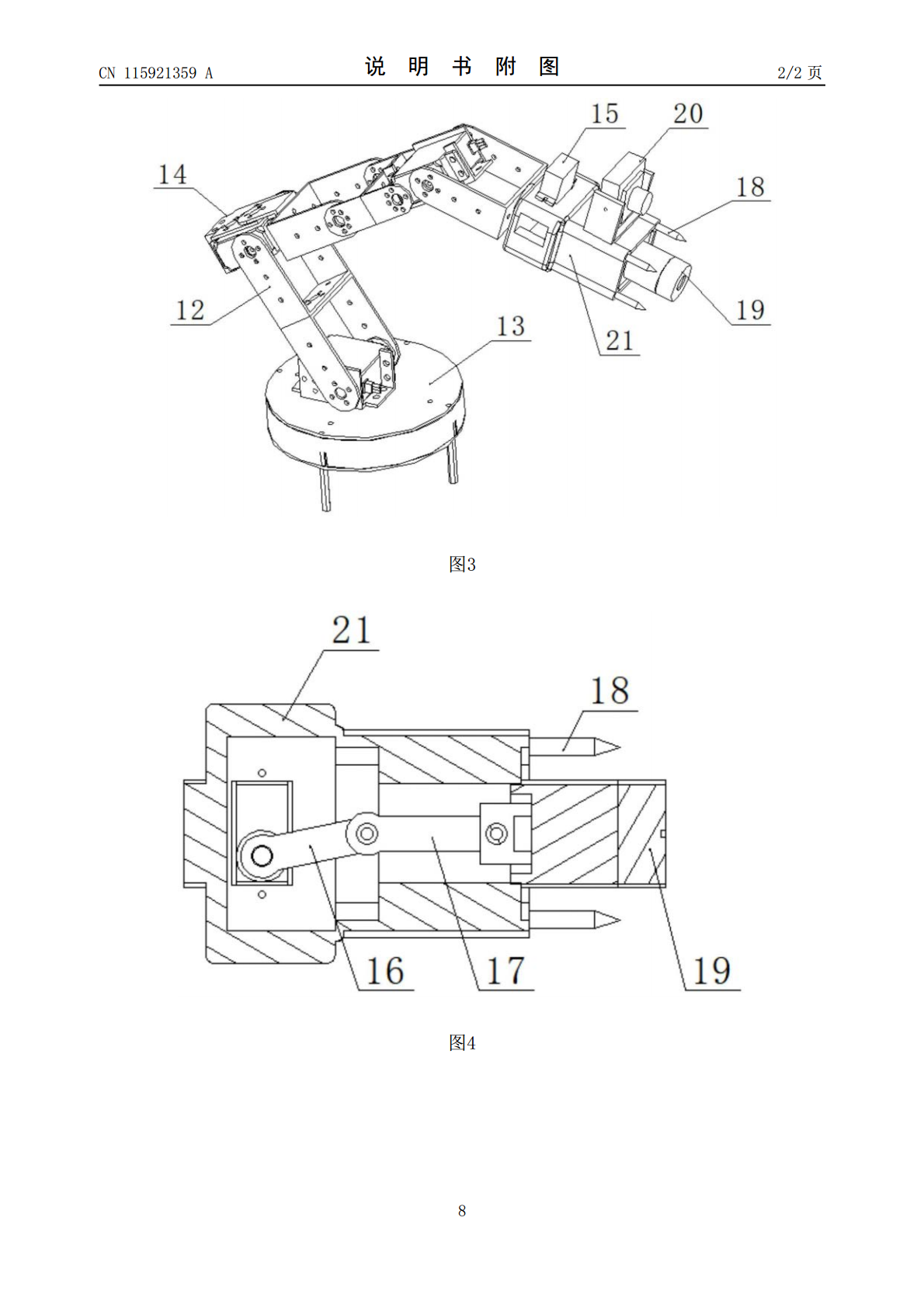
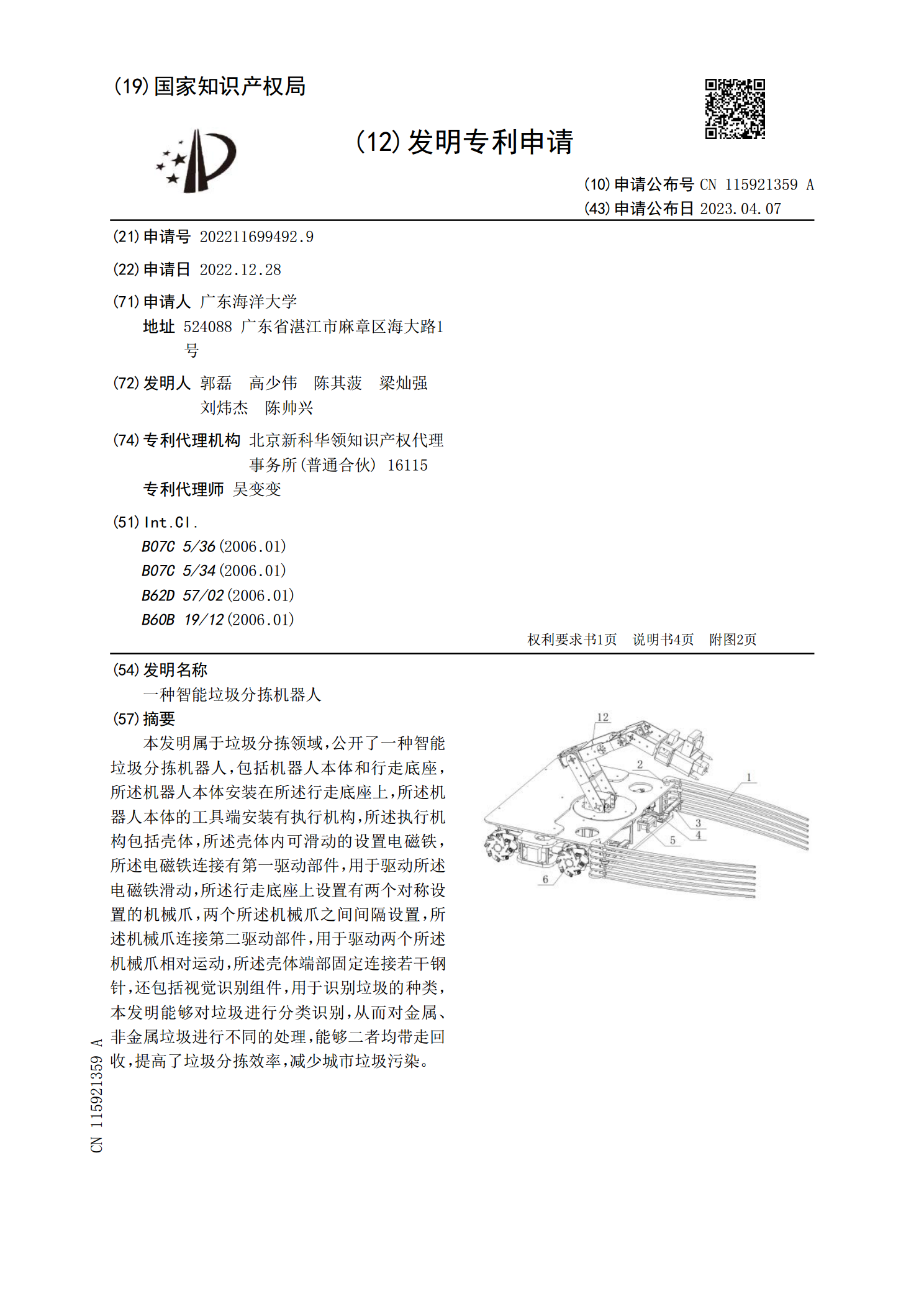
本发明属于垃圾分拣领域,公开了一种智能垃圾分拣机器人,包括机器人本体和行走底座,所述机器人本体安装在所述行走底座上,所述机器人本体的工具端安装有执行机构,所述执行机构包括壳体,所述壳体内可滑动的设置电磁铁,所述电磁铁连接有第一驱动部件,用于驱动所述电磁铁滑动,所述行走底座上设置有两个对称设置的机械爪,两个所述机械爪之间间隔设置,所述机械爪连接第二驱动部件,用于驱动两个所述机械爪相对运动,所述壳体端部固定连接若干钢针,还包括视觉识别组件,用于识别垃圾的种类,本发明能够对垃圾进行分类识别,从而对金属、非金属垃
一种垃圾智能分拣系统.pdf
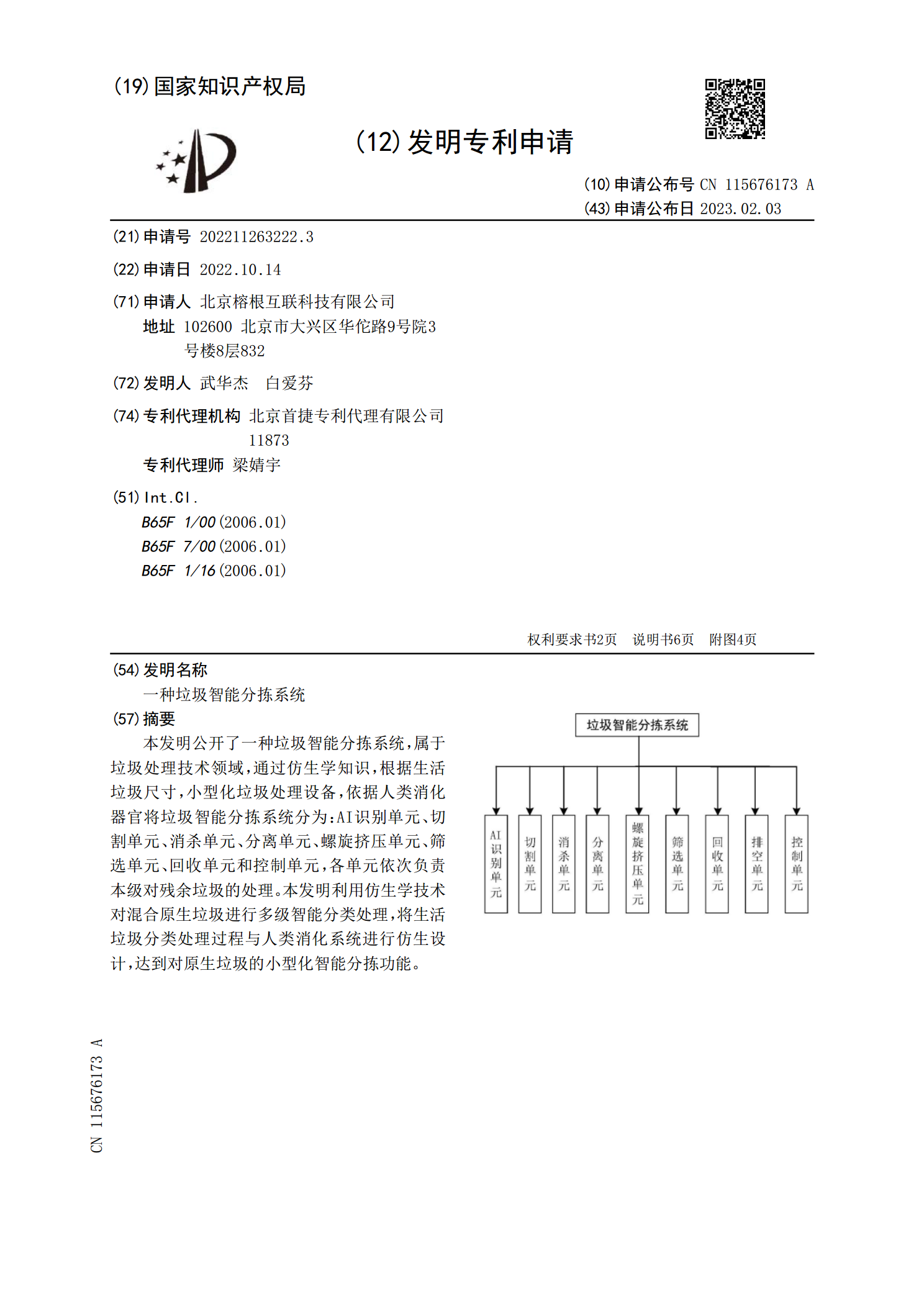
本发明公开了一种垃圾智能分拣系统,属于垃圾处理技术领域,通过仿生学知识,根据生活垃圾尺寸,小型化垃圾处理设备,依据人类消化器官将垃圾智能分拣系统分为:AI识别单元、切割单元、消杀单元、分离单元、螺旋挤压单元、筛选单元、回收单元和控制单元,各单元依次负责本级对残余垃圾的处理。本发明利用仿生学技术对混合原生垃圾进行多级智能分类处理,将生活垃圾分类处理过程与人类消化系统进行仿生设计,达到对原生垃圾的小型化智能分拣功能。
一种垃圾智能分拣机械手.pdf
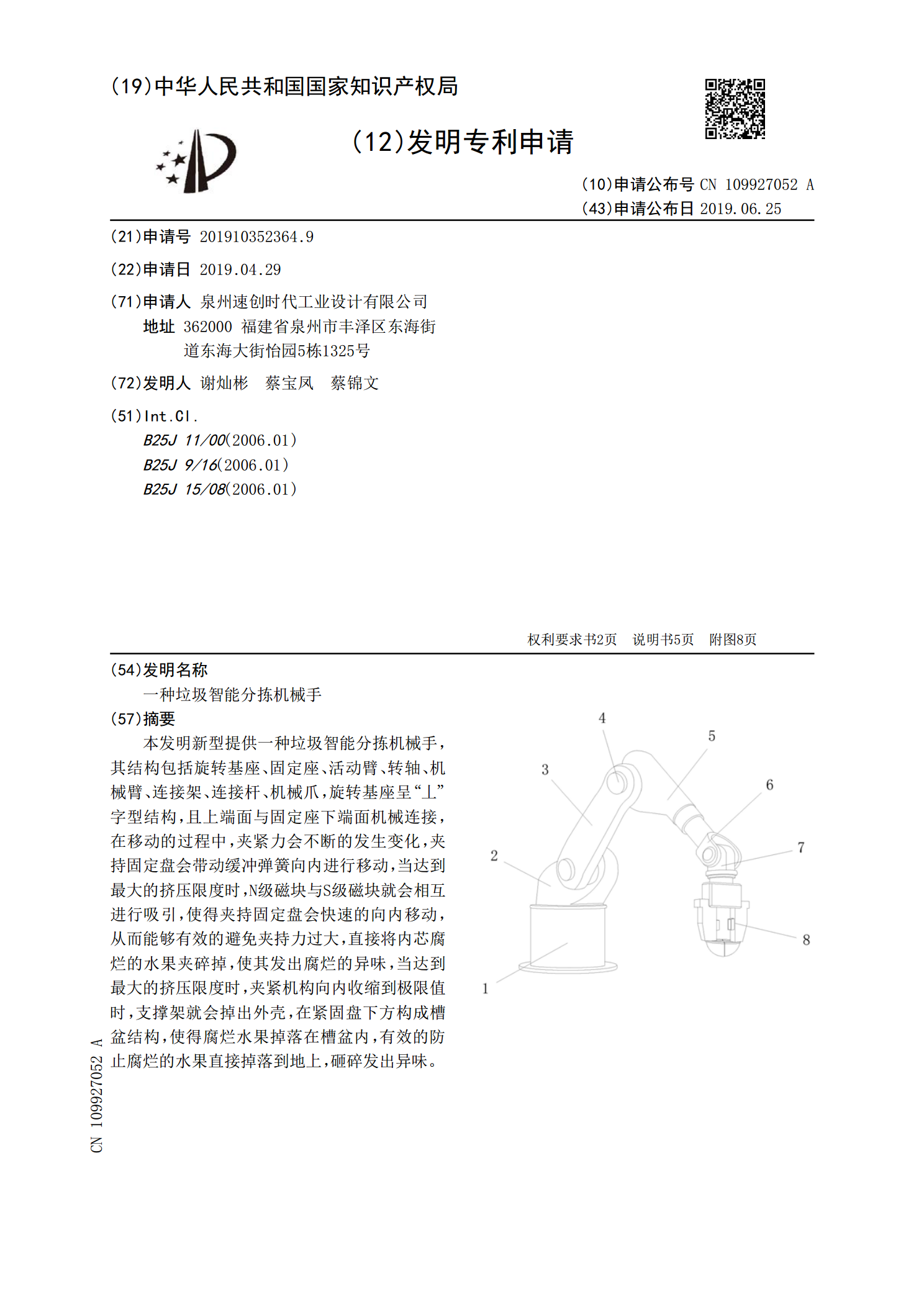
本发明新型提供一种垃圾智能分拣机械手,其结构包括旋转基座、固定座、活动臂、转轴、机械臂、连接架、连接杆、机械爪,旋转基座呈“丄”字型结构,且上端面与固定座下端面机械连接,在移动的过程中,夹紧力会不断的发生变化,夹持固定盘会带动缓冲弹簧向内进行移动,当达到最大的挤压限度时,N级磁块与S级磁块就会相互进行吸引,使得夹持固定盘会快速的向内移动,从而能够有效的避免夹持力过大,直接将内芯腐烂的水果夹碎掉,使其发出腐烂的异味,当达到最大的挤压限度时,夹紧机构向内收缩到极限值时,支撑架就会掉出外壳,在紧固盘下方构成槽盆
一种智能化垃圾分拣装置.pdf
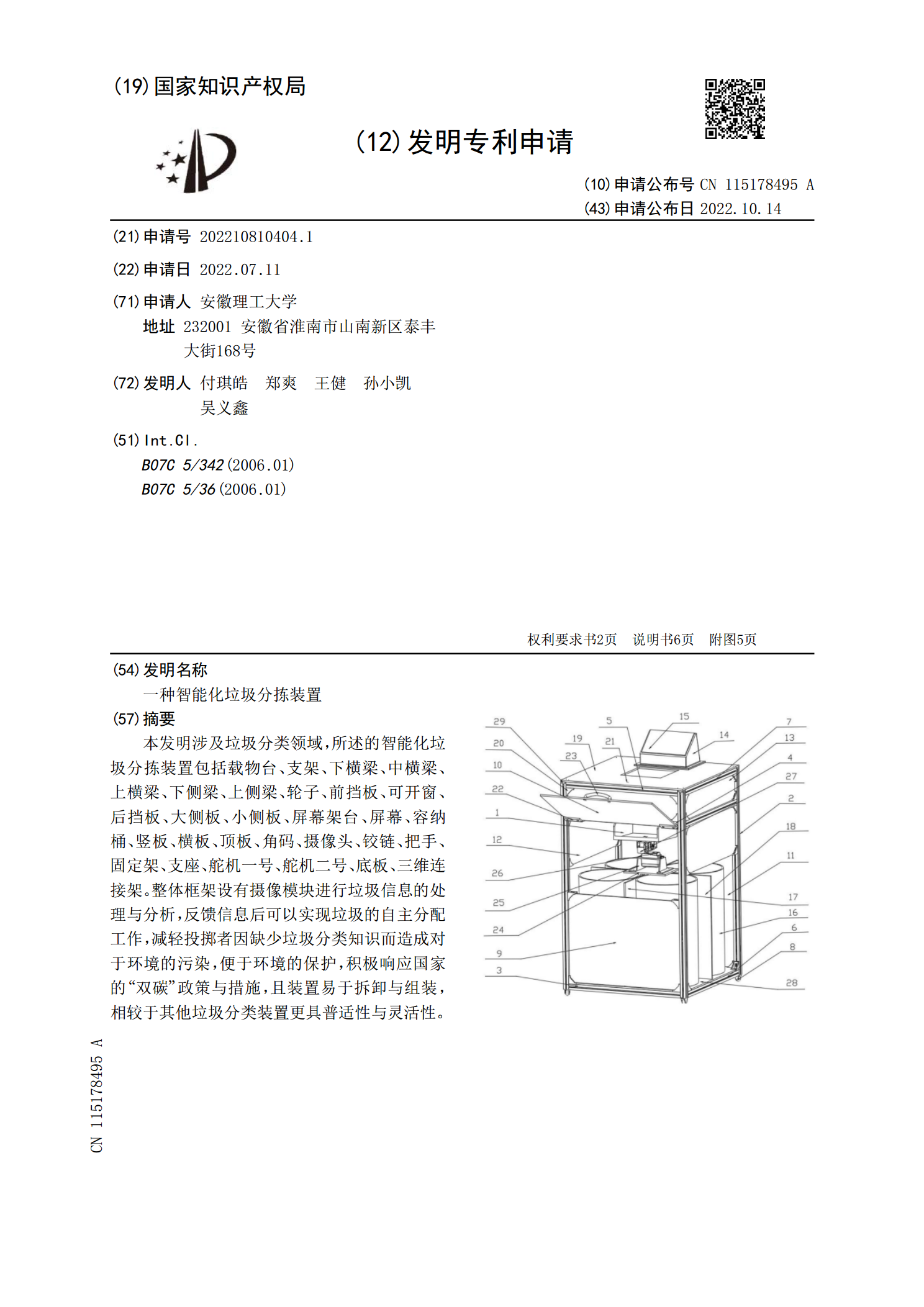
本发明涉及垃圾分类领域,所述的智能化垃圾分拣装置包括载物台、支架、下横梁、中横梁、上横梁、下侧梁、上侧梁、轮子、前挡板、可开窗、后挡板、大侧板、小侧板、屏幕架台、屏幕、容纳桶、竖板、横板、顶板、角码、摄像头、铰链、把手、固定架、支座、舵机一号、舵机二号、底板、三维连接架。整体框架设有摄像模块进行垃圾信息的处理与分析,反馈信息后可以实现垃圾的自主分配工作,减轻投掷者因缺少垃圾分类知识而造成对于环境的污染,便于环境的保护,积极响应国家的“双碳”政策与措施,且装置易于拆卸与组装,相较于其他垃圾分类装置更具普适性
一种分拣生活垃圾的机器人.pdf
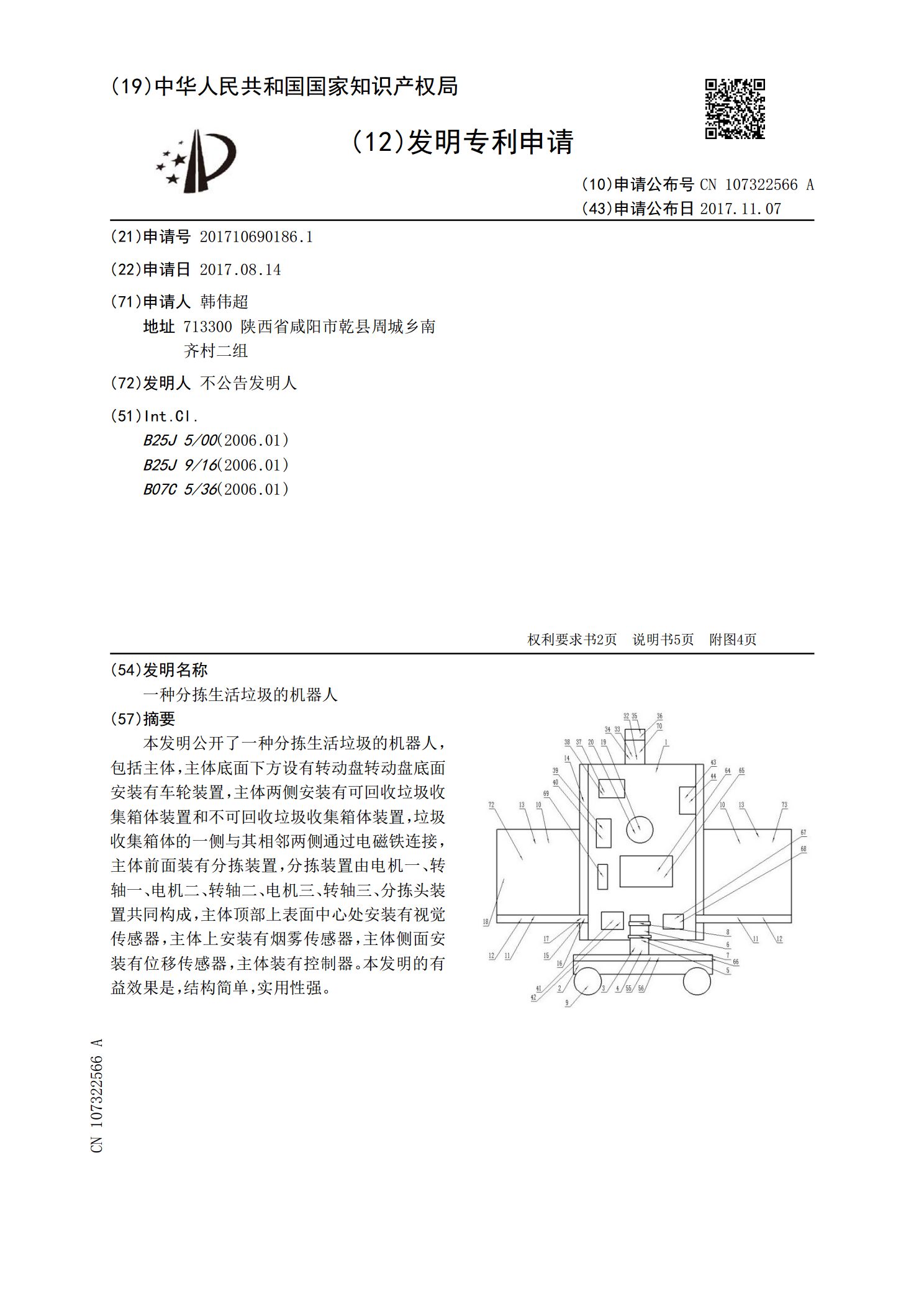
本发明公开了一种分拣生活垃圾的机器人,包括主体,主体底面下方设有转动盘转动盘底面安装有车轮装置,主体两侧安装有可回收垃圾收集箱体装置和不可回收垃圾收集箱体装置,垃圾收集箱体的一侧与其相邻两侧通过电磁铁连接,主体前面装有分拣装置,分拣装置由电机一、转轴一、电机二、转轴二、电机三、转轴三、分拣头装置共同构成,主体顶部上表面中心处安装有视觉传感器,主体上安装有烟雾传感器,主体侧面安装有位移传感器,主体装有控制器。本发明的有益效果是,结构简单,实用性强。