
一种水池漂浮物打捞机.pdf

是你****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水池漂浮物打捞机.pdf
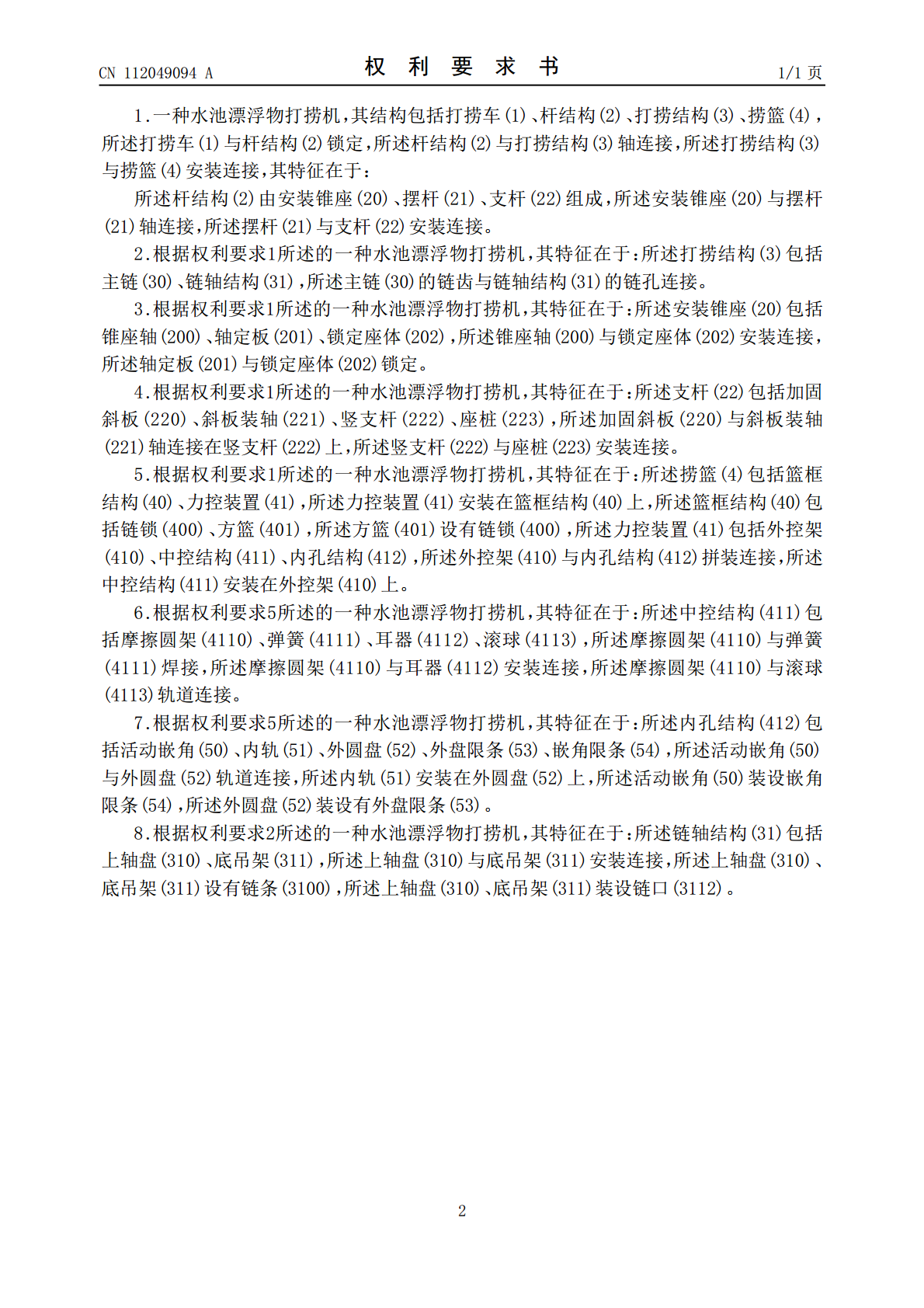
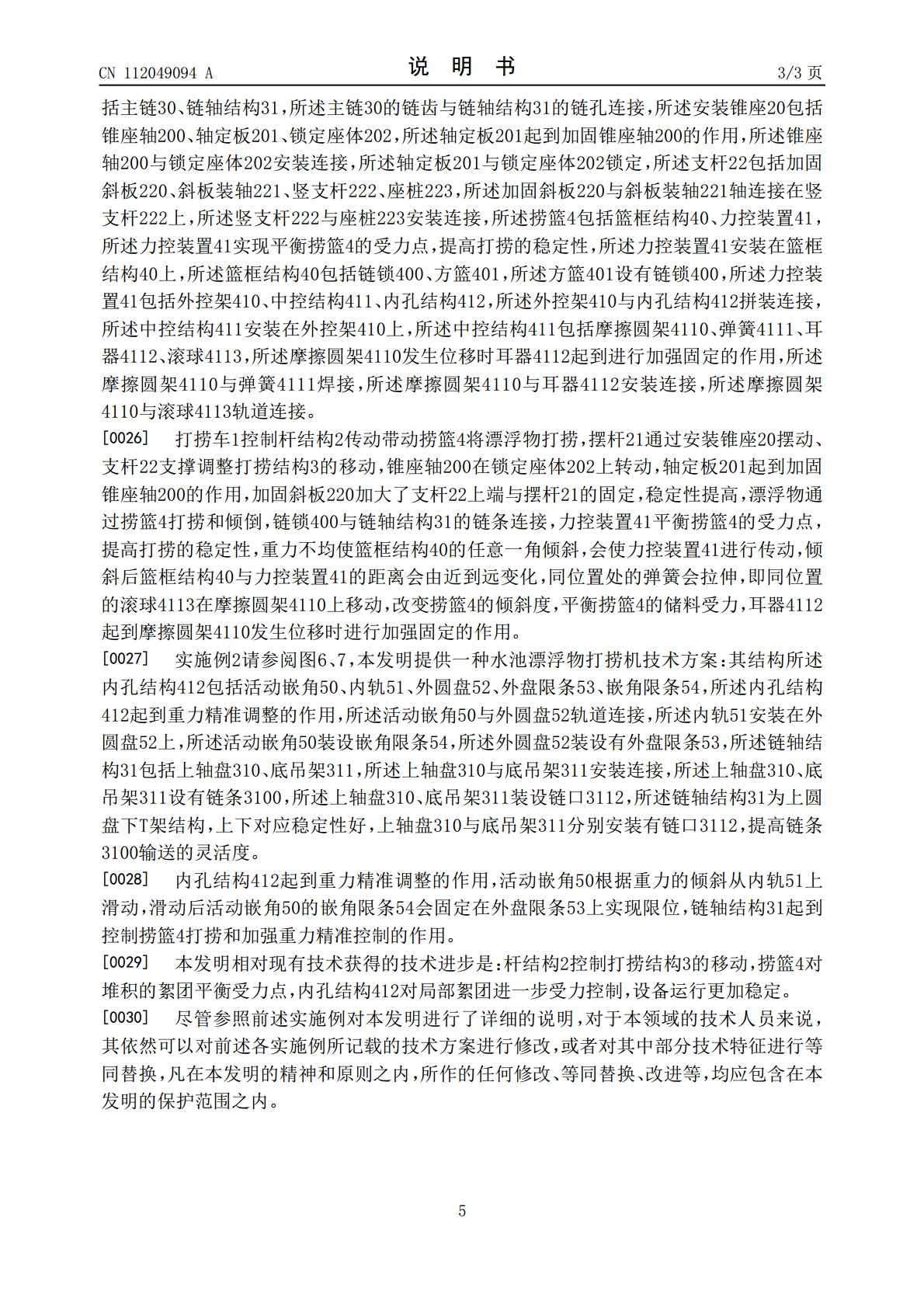
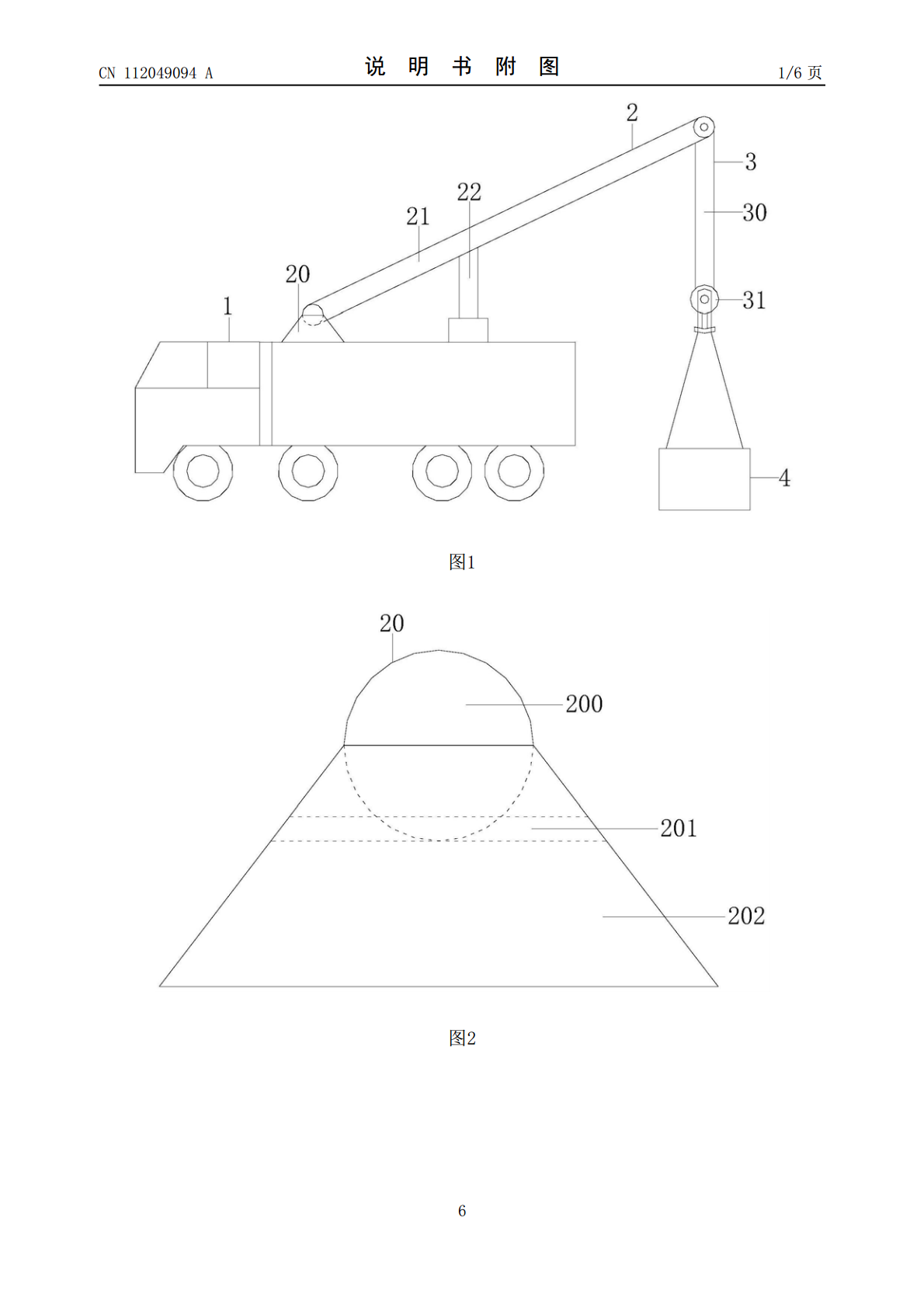
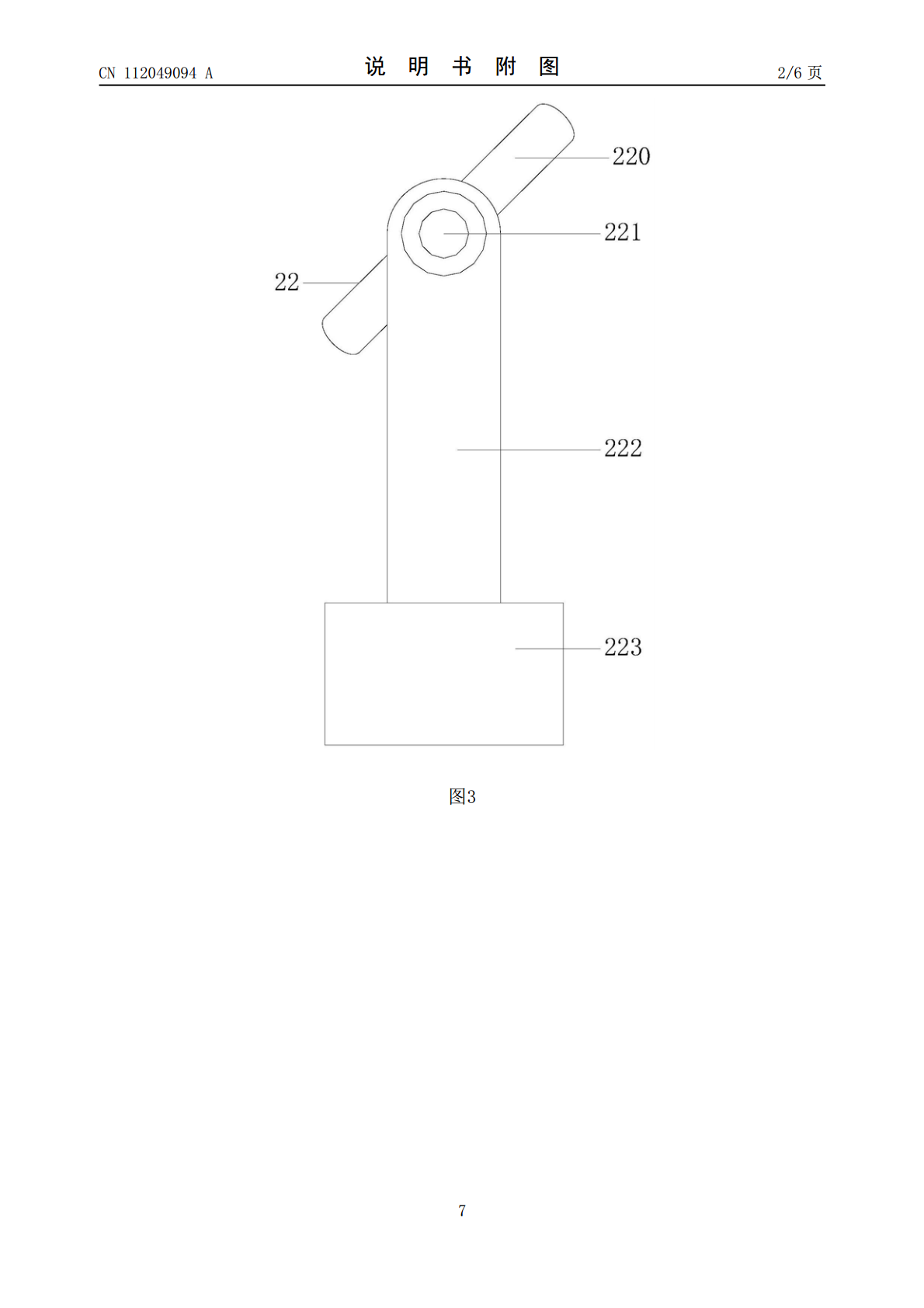
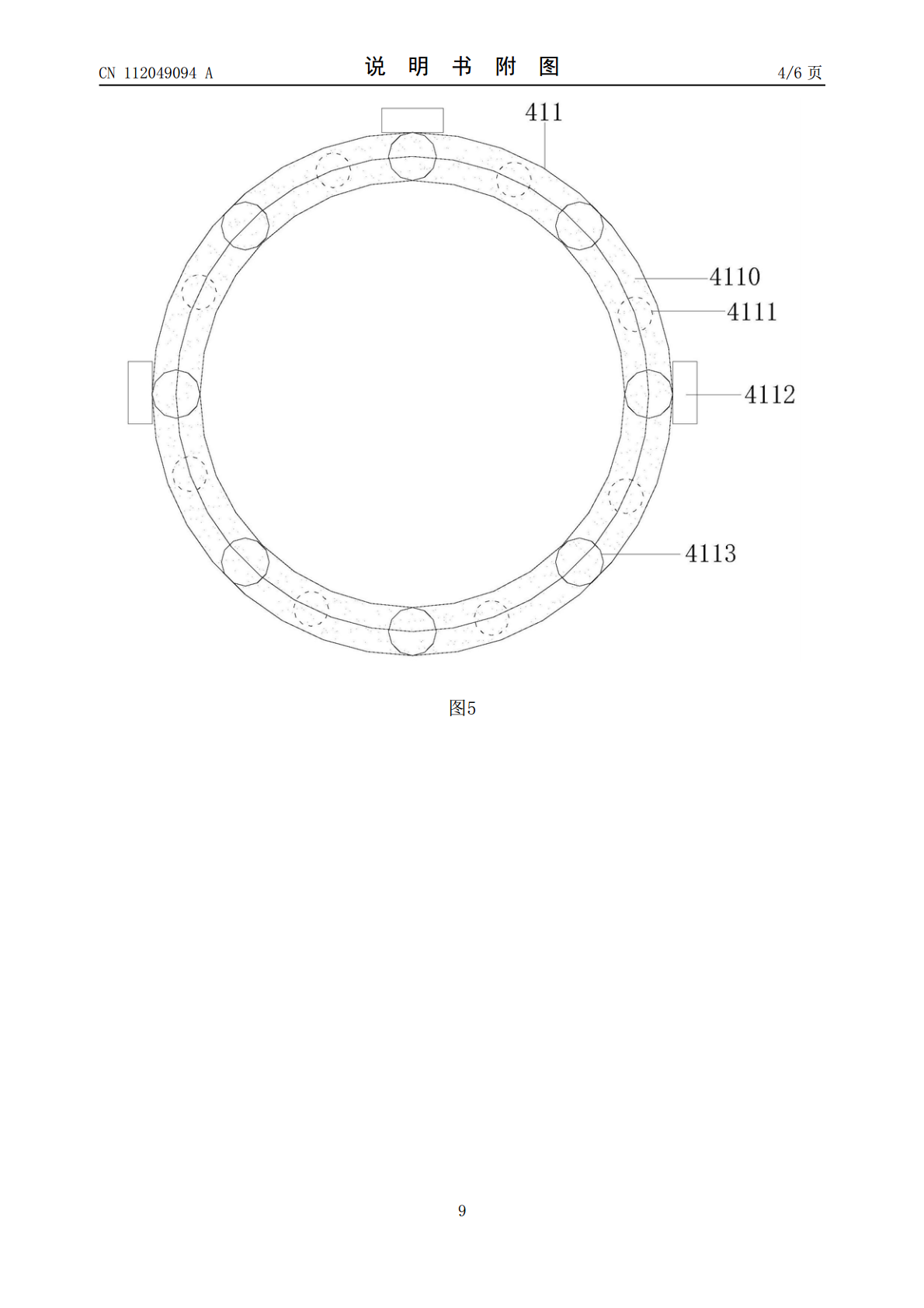
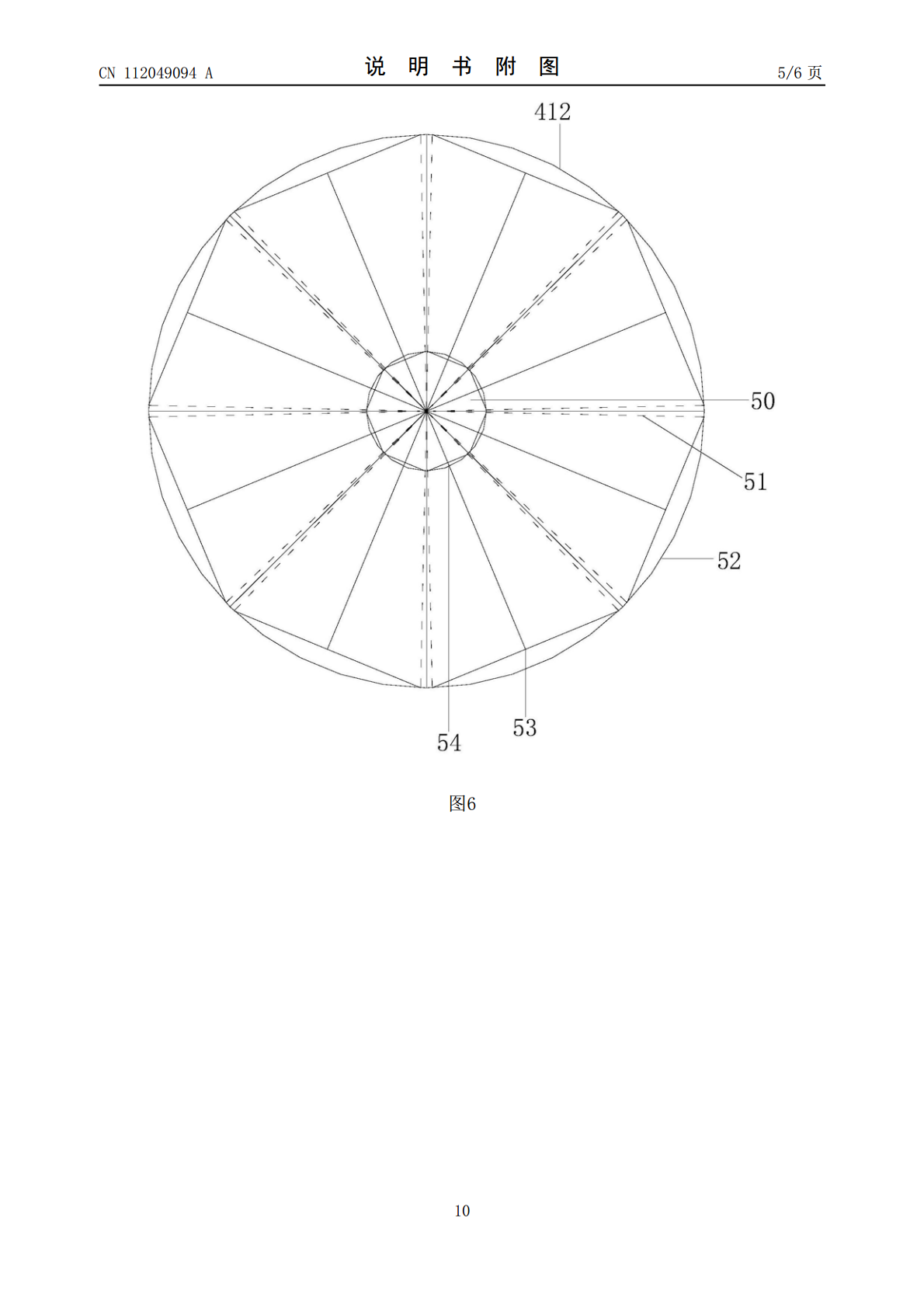
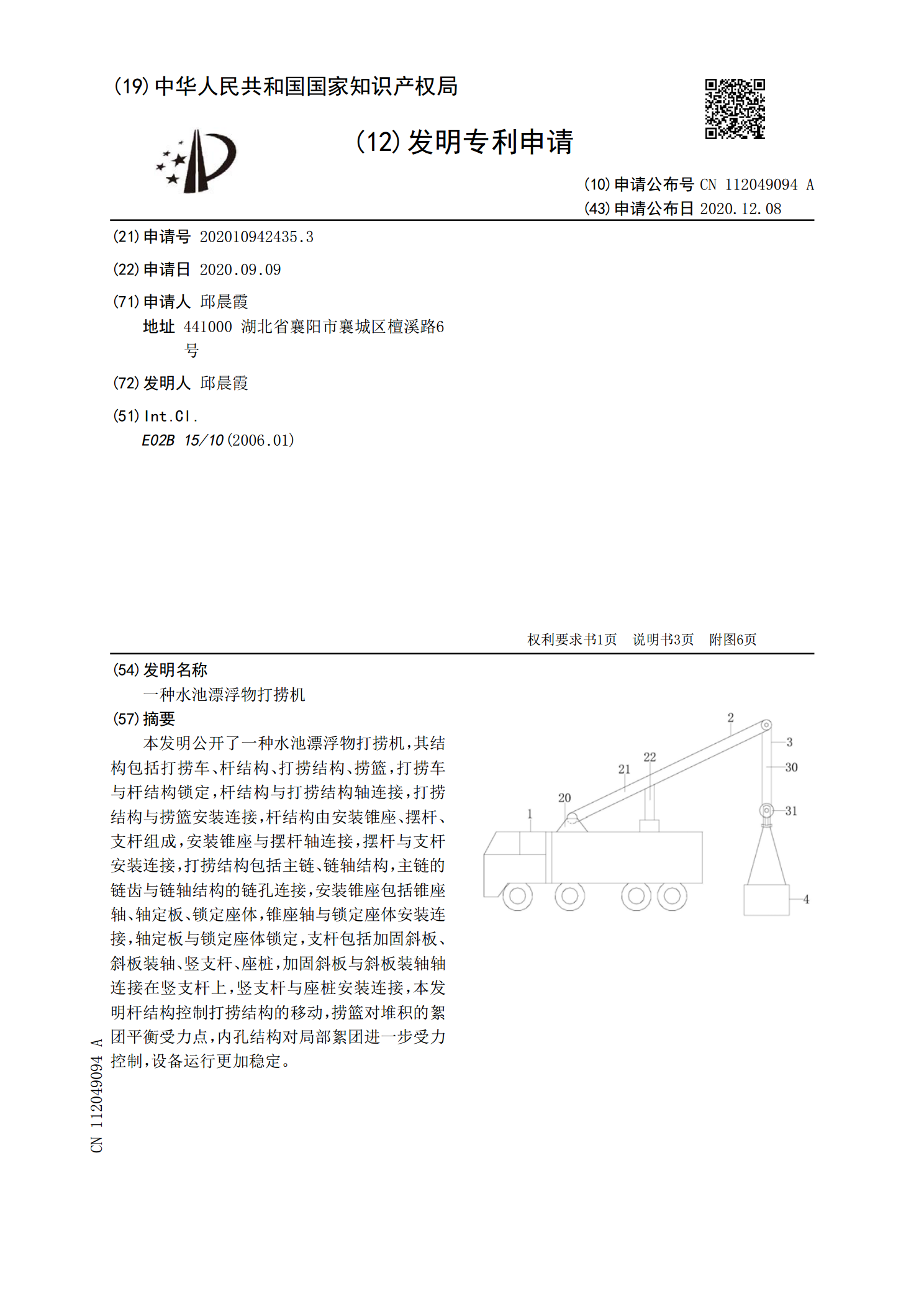
本发明公开了一种水池漂浮物打捞机,其结构包括打捞车、杆结构、打捞结构、捞篮,打捞车与杆结构锁定,杆结构与打捞结构轴连接,打捞结构与捞篮安装连接,杆结构由安装锥座、摆杆、支杆组成,安装锥座与摆杆轴连接,摆杆与支杆安装连接,打捞结构包括主链、链轴结构,主链的链齿与链轴结构的链孔连接,安装锥座包括锥座轴、轴定板、锁定座体,锥座轴与锁定座体安装连接,轴定板与锁定座体锁定,支杆包括加固斜板、斜板装轴、竖支杆、座桩,加固斜板与斜板装轴轴连接在竖支杆上,竖支杆与座桩安装连接,本发明杆结构控制打捞结构的移动,捞篮对堆积的
一种漂浮物打捞装置.pdf
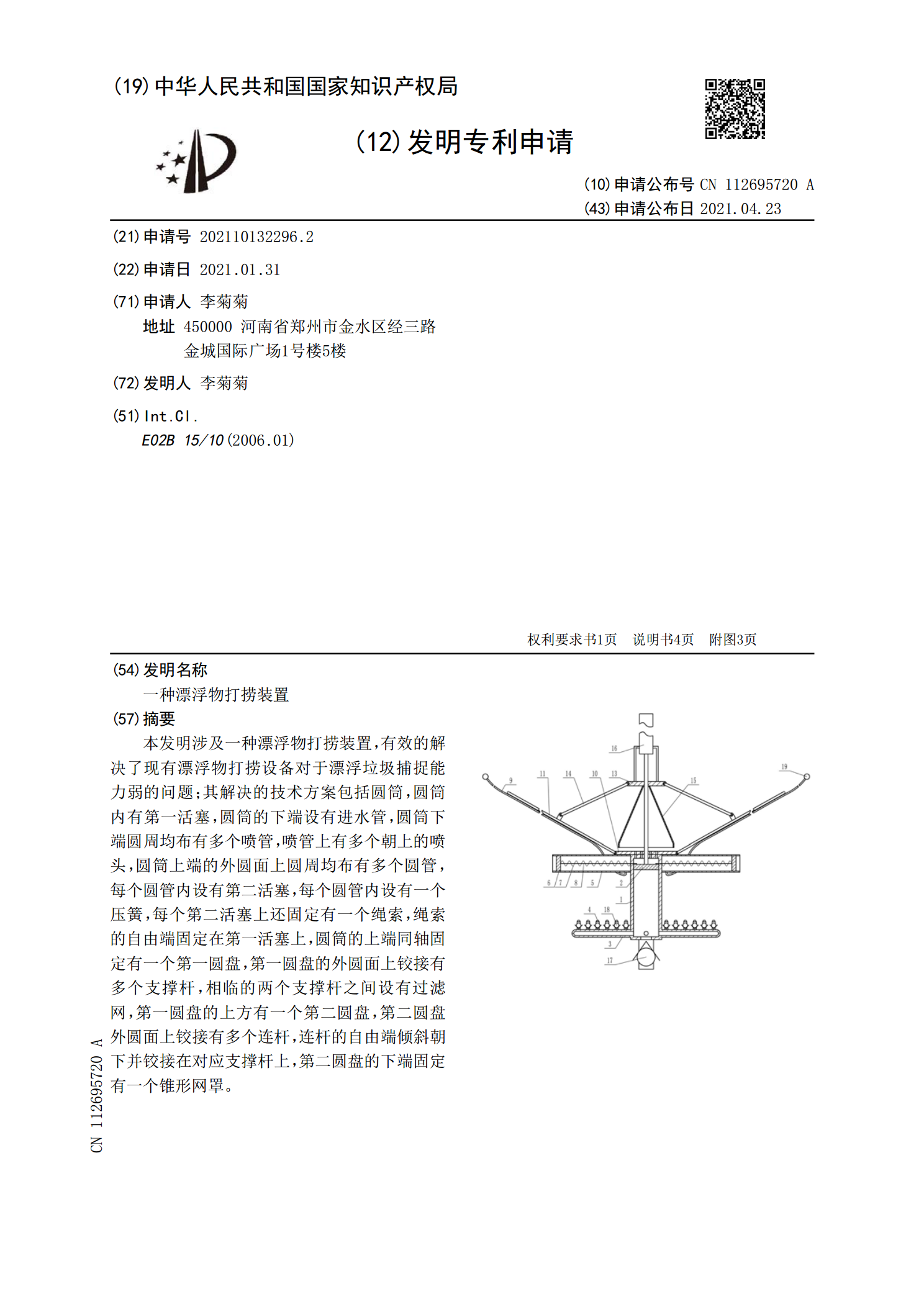
本发明涉及一种漂浮物打捞装置,有效的解决了现有漂浮物打捞设备对于漂浮垃圾捕捉能力弱的问题;其解决的技术方案包括圆筒,圆筒内有第一活塞,圆筒的下端设有进水管,圆筒下端圆周均布有多个喷管,喷管上有多个朝上的喷头,圆筒上端的外圆面上圆周均布有多个圆管,每个圆管内设有第二活塞,每个圆管内设有一个压簧,每个第二活塞上还固定有一个绳索,绳索的自由端固定在第一活塞上,圆筒的上端同轴固定有一个第一圆盘,第一圆盘的外圆面上铰接有多个支撑杆,相临的两个支撑杆之间设有过滤网,第一圆盘的上方有一个第二圆盘,第二圆盘外圆面上铰接有
一种景观水域漂浮物打捞装置.pdf
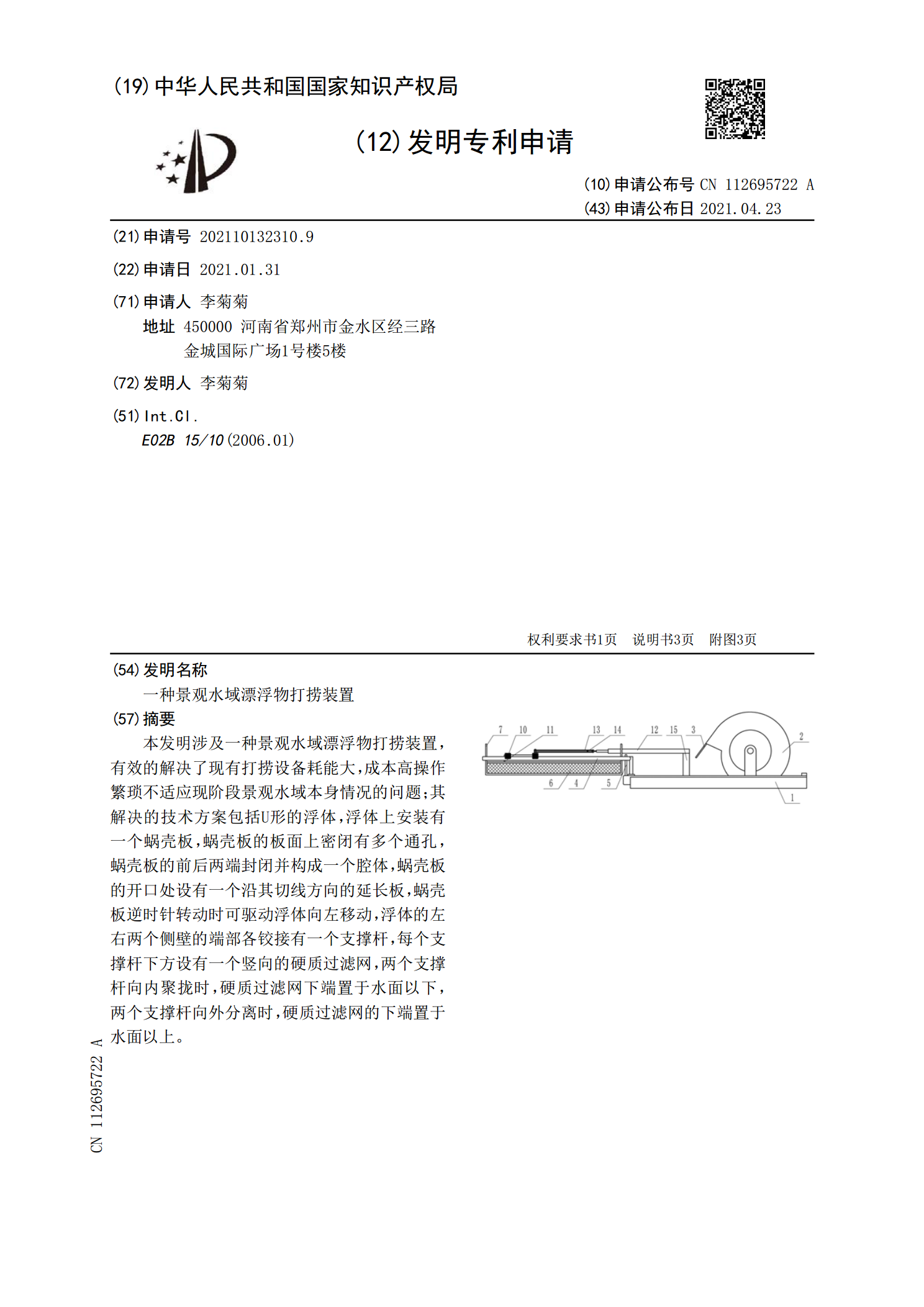
本发明涉及一种景观水域漂浮物打捞装置,有效的解决了现有打捞设备耗能大,成本高操作繁琐不适应现阶段景观水域本身情况的问题;其解决的技术方案包括U形的浮体,浮体上安装有一个蜗壳板,蜗壳板的板面上密闭有多个通孔,蜗壳板的前后两端封闭并构成一个腔体,蜗壳板的开口处设有一个沿其切线方向的延长板,蜗壳板逆时针转动时可驱动浮体向左移动,浮体的左右两个侧壁的端部各铰接有一个支撑杆,每个支撑杆下方设有一个竖向的硬质过滤网,两个支撑杆向内聚拢时,硬质过滤网下端置于水面以下,两个支撑杆向外分离时,硬质过滤网的下端置于水面以上。

一种深水域漂浮物打捞装置.pdf
本发明涉及一种深水域漂浮物打捞装置,有效的解决了现有漂浮物打捞设备对于漂浮垃圾捕捉能力弱的问题;其解决的技术方案包括圆筒,圆筒内有一个第一活塞,圆筒的下端安装有一个水泵,圆筒内设有一个压簧,圆筒中间位置的外壁上圆周均布有多个喷管,圆筒上端的外圆面上圆周均布有多个圆管,每个圆管内设有第二活塞,每个圆管内设有一个第一拉簧,每个第二活塞外端固定有一个绳索,绳索的自由端固定在第一活塞上,圆筒的上端同轴固定有一个圆盘,圆盘的外圆面上铰接有多个与圆管一一对应的支撑杆,相临的两个支撑杆之间设有过滤网,多个支撑杆撑开成伞
一种沉浮式漂浮物打捞装置.pdf
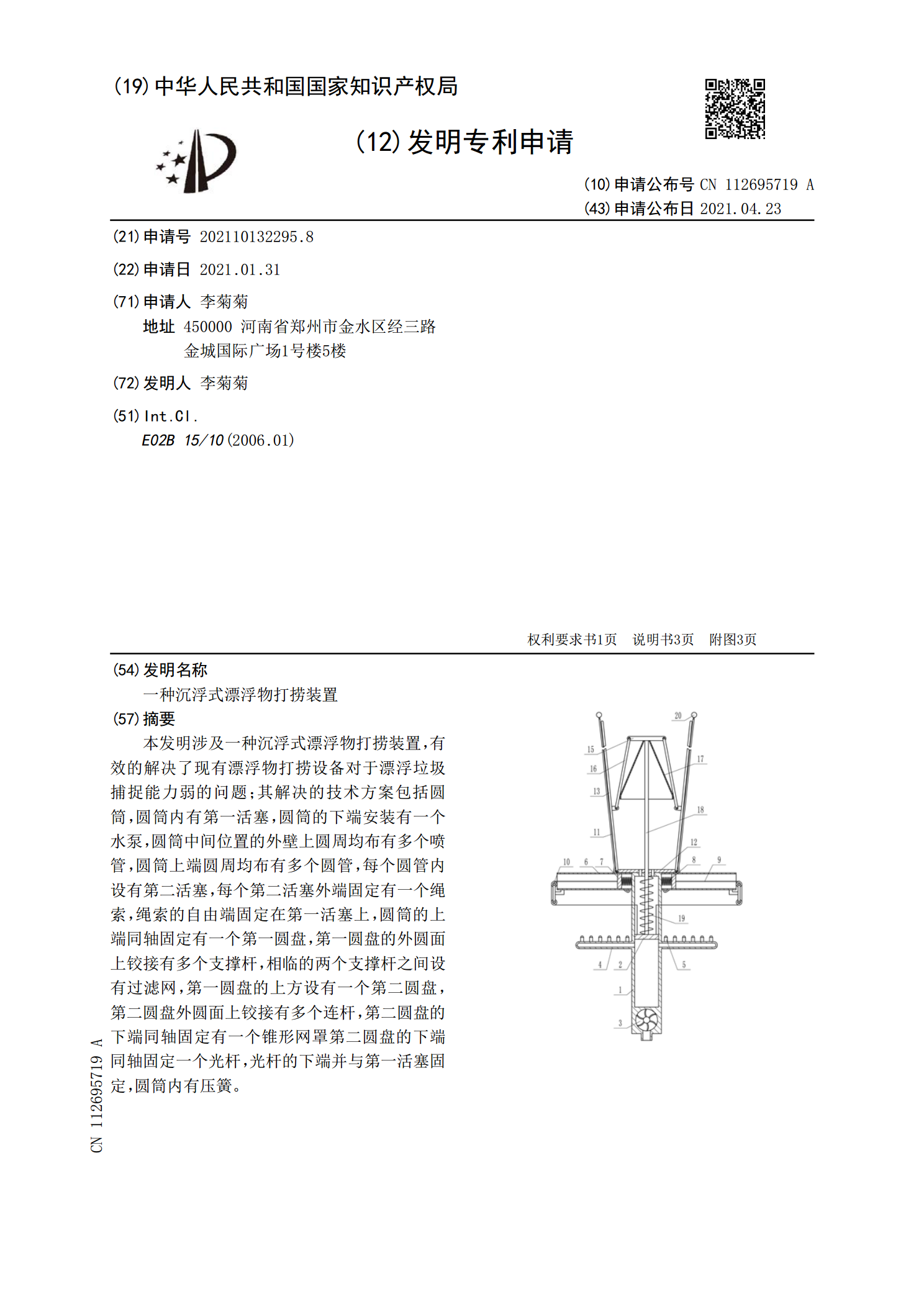
本发明涉及一种沉浮式漂浮物打捞装置,有效的解决了现有漂浮物打捞设备对于漂浮垃圾捕捉能力弱的问题;其解决的技术方案包括圆筒,圆筒内有第一活塞,圆筒的下端安装有一个水泵,圆筒中间位置的外壁上圆周均布有多个喷管,圆筒上端圆周均布有多个圆管,每个圆管内设有第二活塞,每个第二活塞外端固定有一个绳索,绳索的自由端固定在第一活塞上,圆筒的上端同轴固定有一个第一圆盘,第一圆盘的外圆面上铰接有多个支撑杆,相临的两个支撑杆之间设有过滤网,第一圆盘的上方设有一个第二圆盘,第二圆盘外圆面上铰接有多个连杆,第二圆盘的下端同轴固定有