
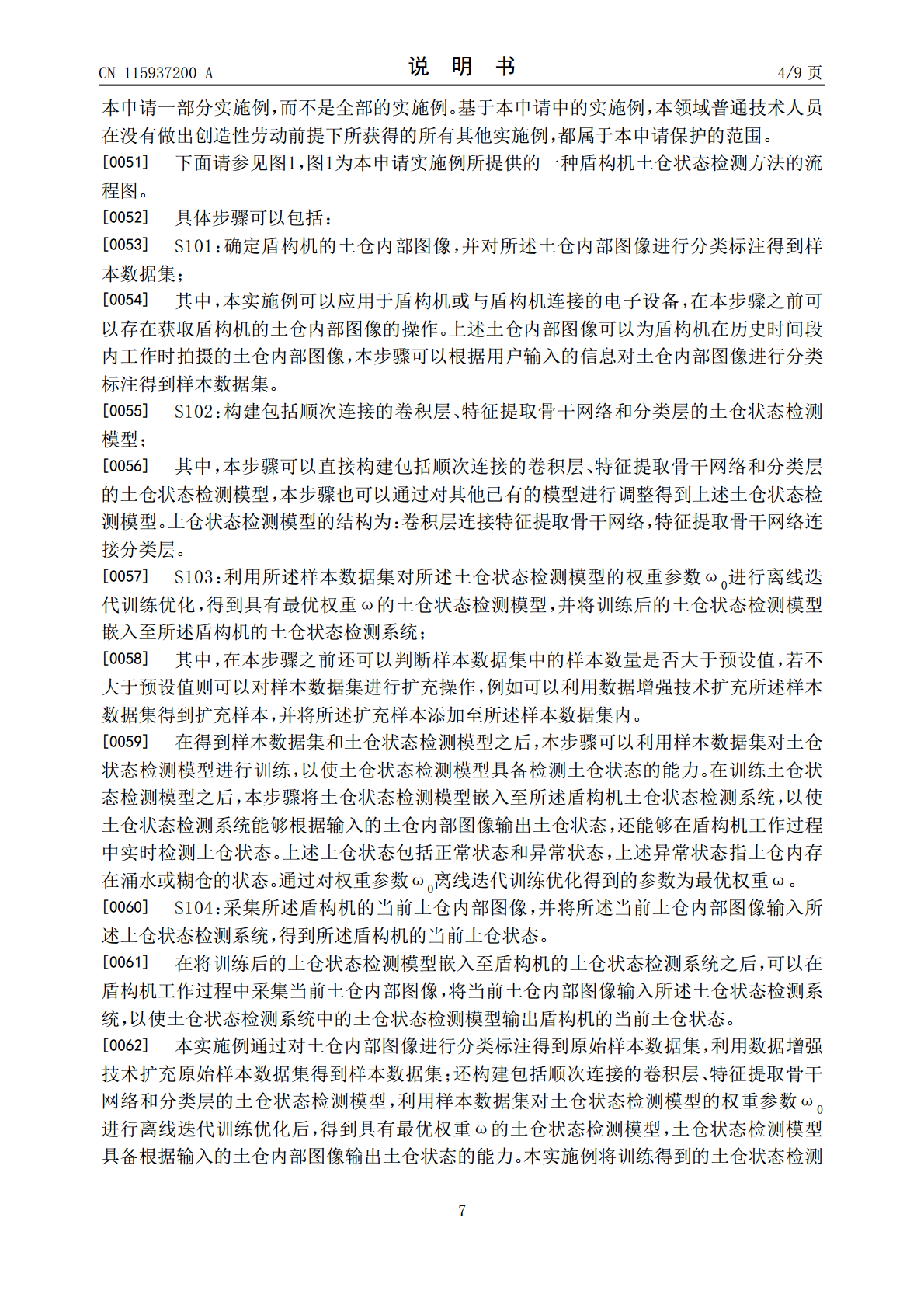
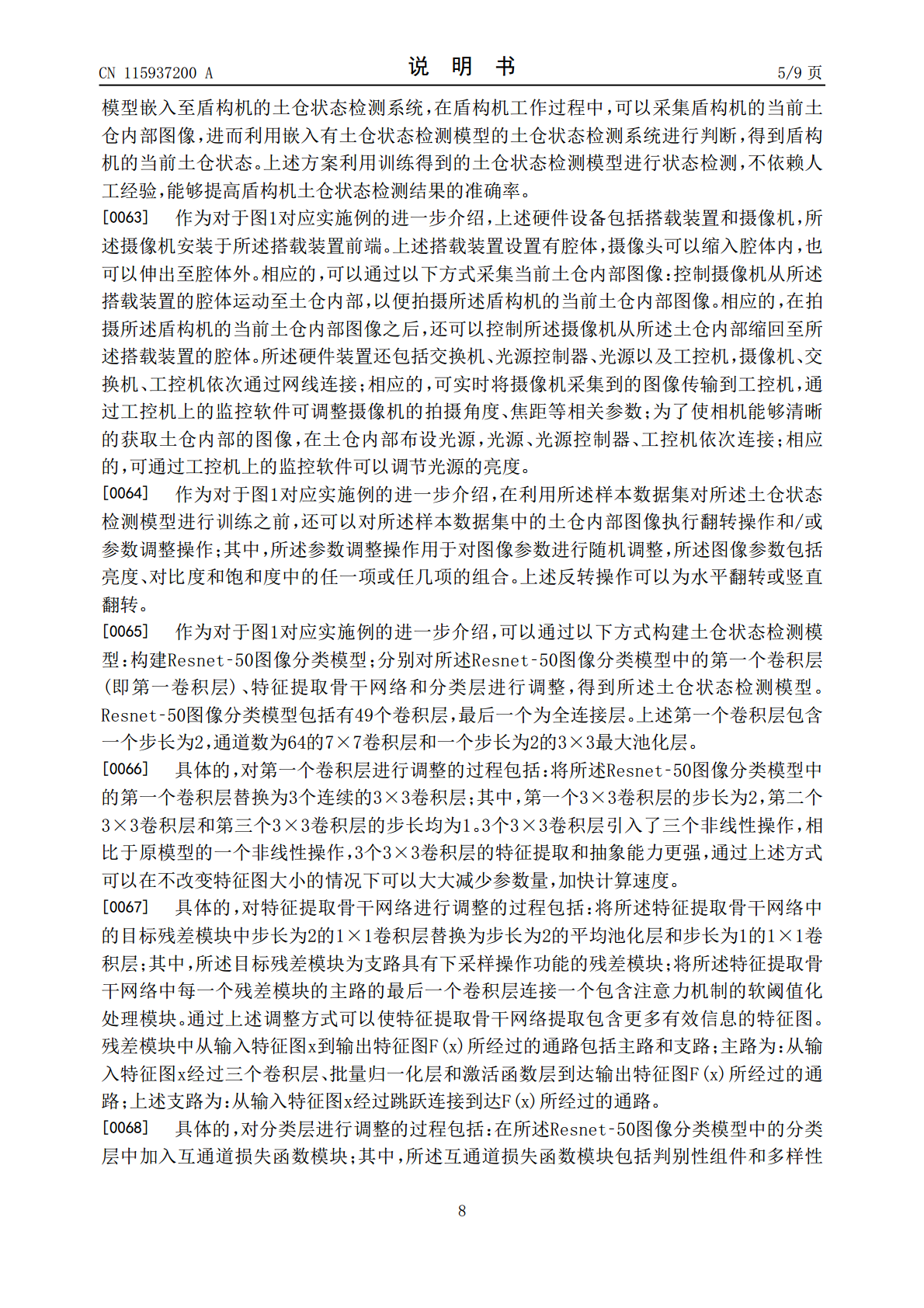
盾构机土仓状态检测方法及土仓状态检测系统.pdf

秀美****甜v

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

盾构机土仓状态检测方法及土仓状态检测系统.pdf
本申请公开了一种盾构机土仓状态检测方法及土仓状态检测系统,所属的技术领域为盾构机技术。上述盾构机土仓状态检测方法包括:确定盾构机土仓内部图像,并对土仓内部图像进行分类标注得到样本数据集;构建包括顺次连接的卷积层、特征提取骨干网络和分类层的土仓状态检测模型;利用样本数据集对土仓状态检测模型的权重参数ω

土压平衡盾构机实时判别土仓内渣土堵塞的方法研究.docx
土压平衡盾构机实时判别土仓内渣土堵塞的方法研究标题:土压平衡盾构机实时判别土仓内渣土堵塞的方法研究摘要:土压平衡盾构机作为一种重要的地下隧道开挖设备,其正常运行与渣土排出的顺畅流程密切相关。然而,在实际施工过程中,土仓内渣土堵塞会导致工程停工、延误进度甚至设备损坏等严重后果。因此,本研究旨在开发一种能够实时判别土仓内渣土堵塞的方法,以提高盾构机的施工效率和安全性。1.引言土压平衡盾构机是近年来广泛应用于城市地铁、隧道、地下管道等工程中的一种现代化施工设备。然而,在实际施工中,土仓内渣土堵塞的问题经常发生,
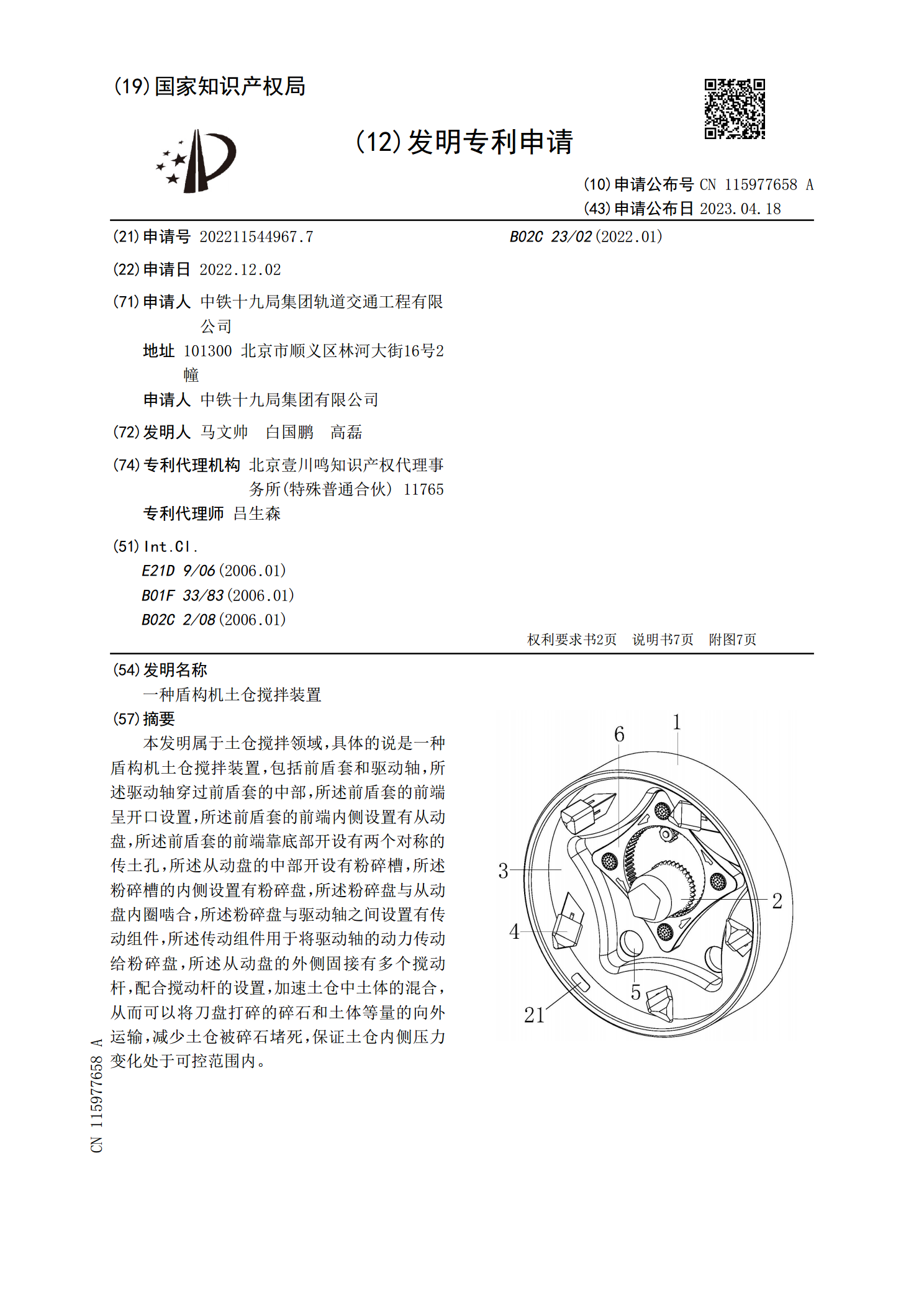
一种盾构机土仓搅拌装置.pdf
本发明属于土仓搅拌领域,具体的说是一种盾构机土仓搅拌装置,包括前盾套和驱动轴,所述驱动轴穿过前盾套的中部,所述前盾套的前端呈开口设置,所述前盾套的前端内侧设置有从动盘,所述前盾套的前端靠底部开设有两个对称的传土孔,所述从动盘的中部开设有粉碎槽,所述粉碎槽的内侧设置有粉碎盘,所述粉碎盘与从动盘内圈啮合,所述粉碎盘与驱动轴之间设置有传动组件,所述传动组件用于将驱动轴的动力传动给粉碎盘,所述从动盘的外侧固接有多个搅动杆,配合搅动杆的设置,加速土仓中土体的混合,从而可以将刀盘打碎的碎石和土体等量的向外运输,减少土

土压盾构土仓压力设定与控制.ppt
土压平衡盾构土仓压力设定与控制提纲1前言1.2土仓压力设定问题设定合适的土仓压力确保开挖面的稳定关系到盾构施工效率和工程环境安全。开挖面地层稳定性较好时土仓压力过大时会引起刀盘扭矩和推力增大、推进速度下降存在盾构掘进效率降低、设备能耗和损耗加大等问题;开挖面地层稳定性较差时土仓压力不足则会发生开挖面的涌水或坍塌造成地层水土流失过多导致地层沉降难以控制等问题。1.3开挖面稳定和土仓压力设定相关理论开挖面稳定是通过保持盾构刀盘支承的压力仓内泥

一种适用于盾构土仓泥水仓渣土黏度检测装置.pdf
本实用新型公开了一种适用于盾构土仓/泥水仓渣土黏度检测装置,该装置设置在土仓/泥水仓内,包括设置在刀盘背部的搅拌棒,搅拌棒上设有传感器组件,传感器组件通过管线与后台控制系统相连接。所述搅拌棒为锥形棒体,锥形棒体位于土仓/泥水仓内,刀盘背部均布有多个锥形棒体,锥形棒体的大头端与刀盘固定连接,传感器组件与锥形棒体同轴线设置且设置于锥形棒体的小头端。本实用新型通过搅拌棒直接连接在刀盘上,不占用空间且结构检测,检测方便,与盾构机的融合性好,于随时调整渣土改良参数,提高盾构机掘进效率和掘进安全系数。