
一种电网远程监控装置.pdf

小沛****文章


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种电网远程监控装置.pdf
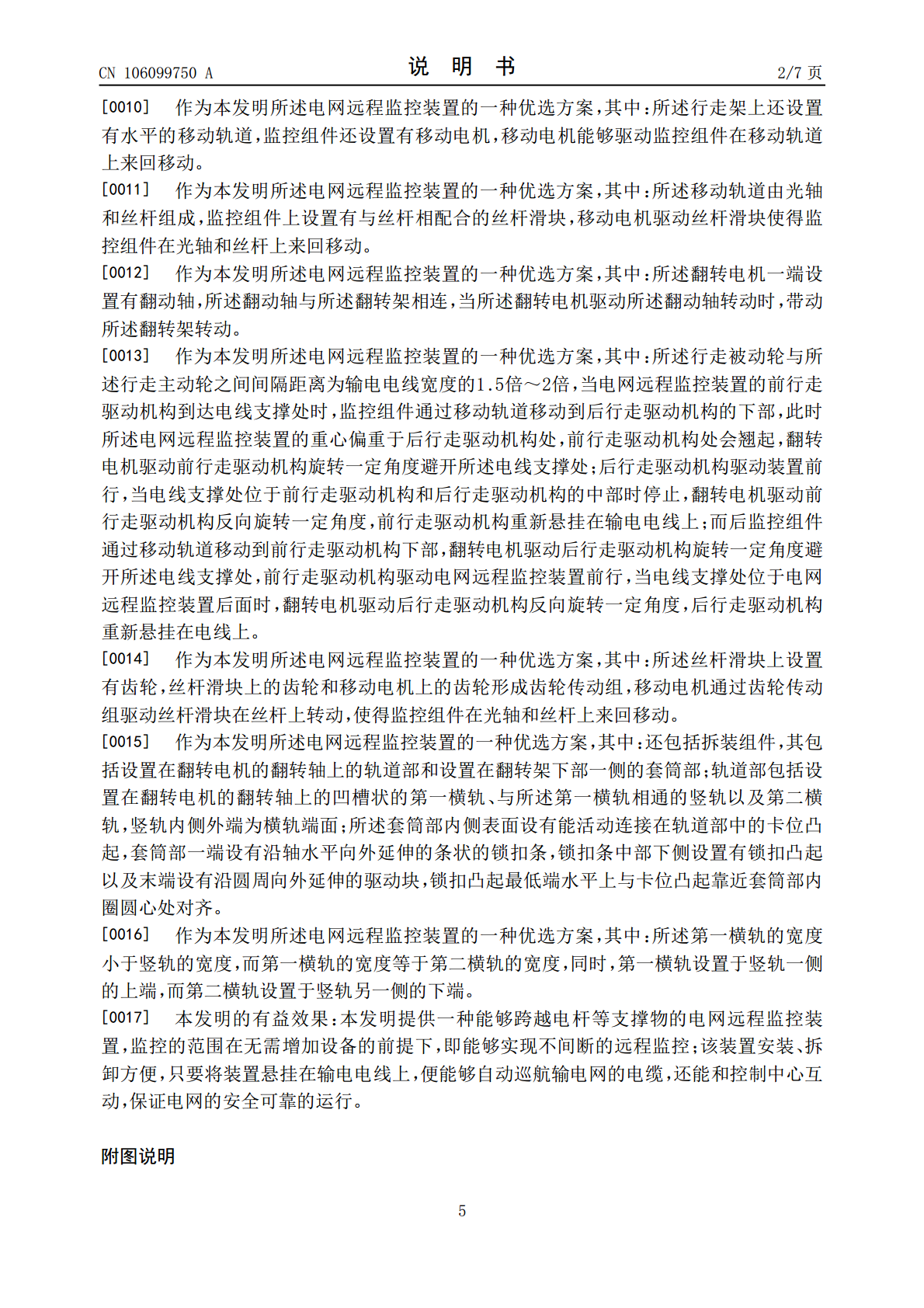
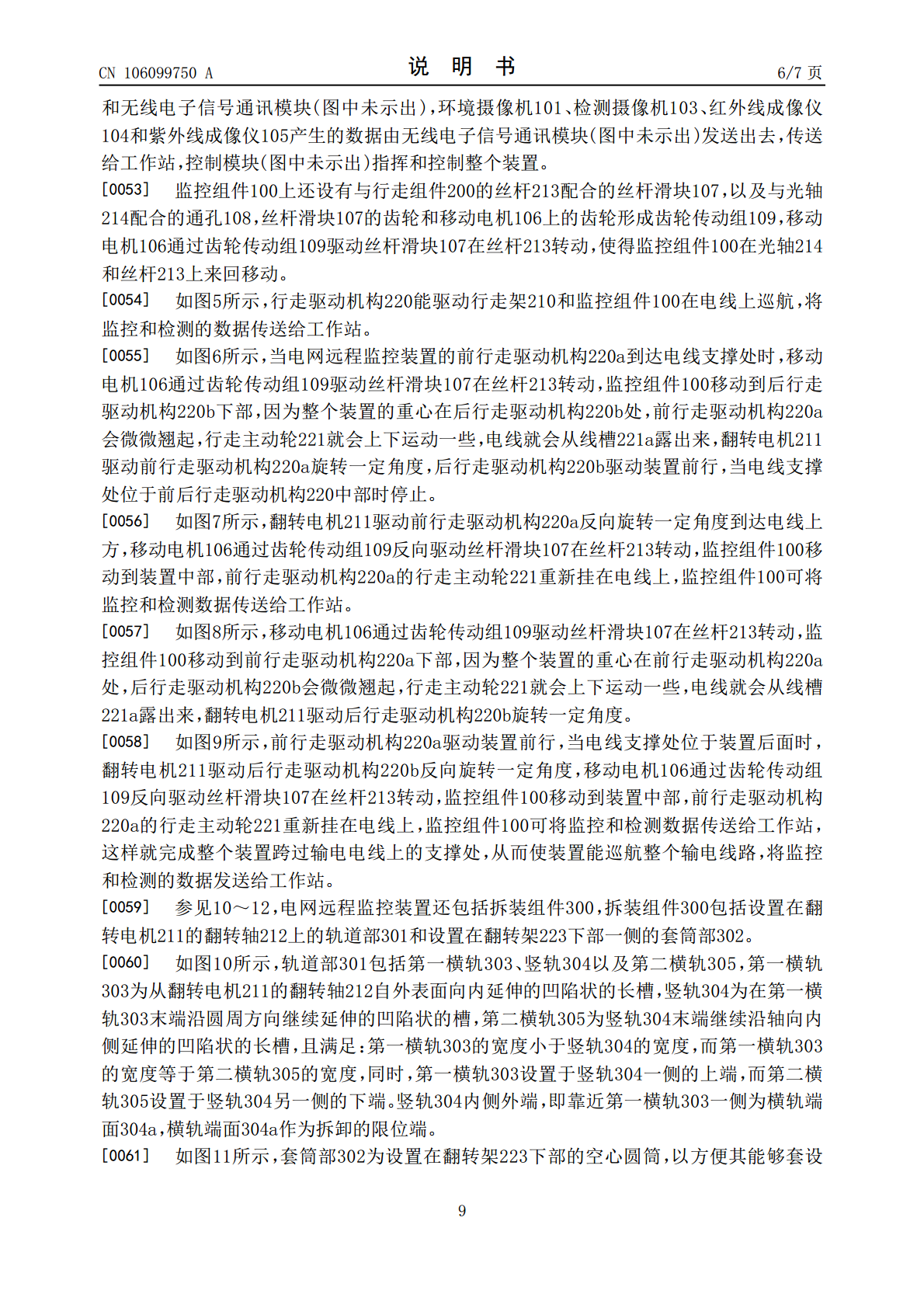
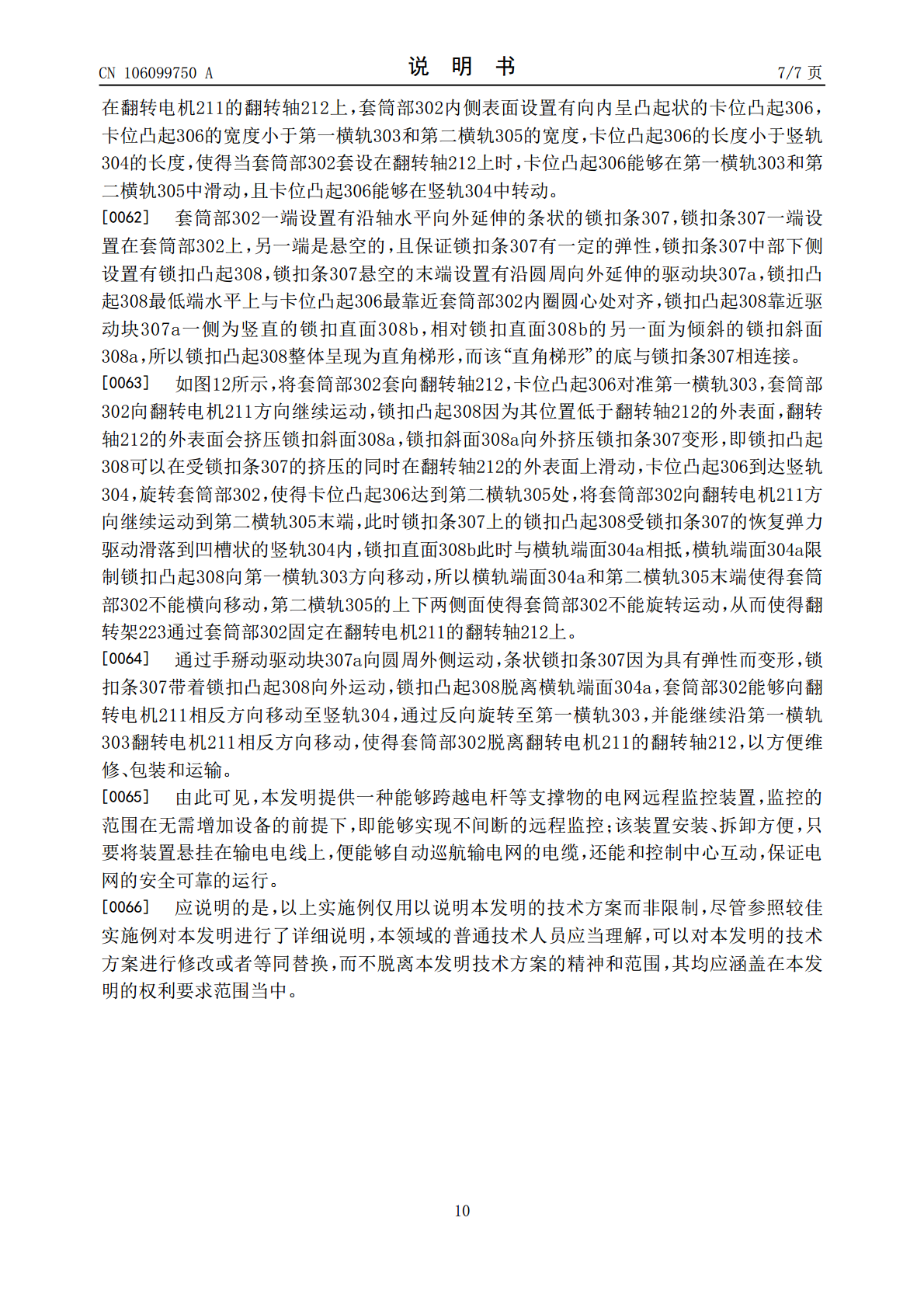
本发明公开了一种电网远程监控装置,包括,监控组件和行走组件,所述行走组件承载监控组件在输电电线上移动,监控组件包括设置在下部对输电线路下方环境拍摄的环境摄像机,设置在上部对输电电线和支撑电线部分拍摄的检测摄像机、红外线成像仪和紫外线成像仪,水平设置在监控组件一处的风速测量标,还包括控制模块和无线电子信号通讯模块。本发明提供一种能够跨越电杆等支撑物的电网远程监控装置,其能够自动巡航输电网的电缆,还能和控制中心互动,保证电网的安全可靠的运行。

一种远程监控方法及装置.pdf
本发明提出了一种远程监控方法,该方法包括:选取至少一关键时间点;当到达该关键时间点时,控制拍摄该陪护机器人前方的影像及获取被陪护人的陪伴数据;发送所述拍摄影像及所述陪伴数据至与该陪护机器人进行无线通信的终端设备。本发明还提供一种远程监控装置。本发明极大提高了监控的灵活性与效率,保障监控人能够及时了解被监控人的最新消息。
一种油井远程监控装置.pdf
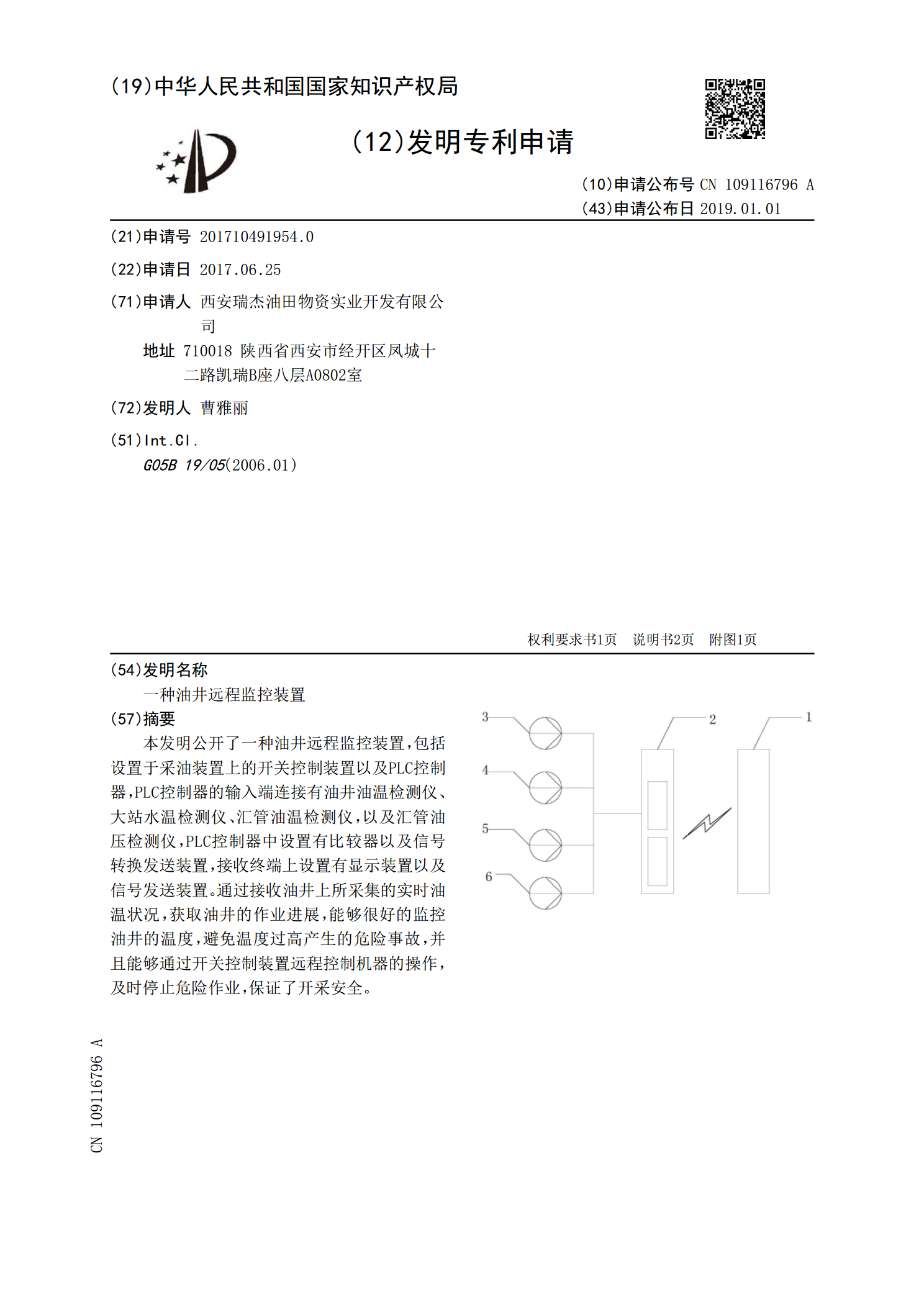
本发明公开了一种油井远程监控装置,包括设置于采油装置上的开关控制装置以及PLC控制器,PLC控制器的输入端连接有油井油温检测仪、大站水温检测仪、汇管油温检测仪,以及汇管油压检测仪,PLC控制器中设置有比较器以及信号转换发送装置,接收终端上设置有显示装置以及信号发送装置。通过接收油井上所采集的实时油温状况,获取油井的作业进展,能够很好的监控油井的温度,避免温度过高产生的危险事故,并且能够通过开关控制装置远程控制机器的操作,及时停止危险作业,保证了开采安全。

一种摄像监控远程装置.pdf
本发明公开了一种摄像监控远程装置,包括壳体,设置于壳体内的:红外探测器,用于感应盗窃者所发出的红外线;控制模块,与所述红外探测器连接,并接收红外探测器发出的电信号;蜂鸣器,与控制模块连接,并受控制模块控制而发出蜂鸣声;网络连接模块,与控制模块和外界的监控终端连接,从而将控制模块发出报警指令通过网络传递外界的监控终端,电源模块,摄像头,与控制模块连接,并受控制模块控制而开启摄像,储存模块,与摄像头连接,将摄像头拍摄的视屏或图片储存,2G/3G/4G通讯模块,与控制模块连接,并受控制模块控制而将控制模块发出的

一种油井远程监控装置.pdf
本发明公开了一种油井远程监控装置,包括设置于采油装置上的开关控制装置以及PLC控制器,PLC控制器的输入端连接有油井油温检测仪、大站水温检测仪、汇管油温检测仪,以及汇管油压检测仪,PLC控制器中设置有比较器以及信号转换发送装置,接收终端上设置有显示装置以及信号发送装置。通过接收油井上所采集的实时油温状况,获取油井的作业进展,能够很好的监控油井的温度,避免温度过高产生的危险事故,并且能够通过开关控制装置远程控制机器的操作,及时停止危险作业,保证了开采安全。