
PLC程序及HMI设计规范.docx

玄静****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

PLC程序及HMI设计规范.docx
PLC程序及HMI设计简易规范提交审核版本备注任宝华周佳.10创立为了便于程序旳易用性,通用性及可维护性,以便不同程序设计者之间旳程序修改,提高程序整体质量,现将PLC及HMI设计做如下规范。(因公司常用PLC选择为欧姆龙公司旳小型CP系列,编程以欧姆龙旳CX-Programmer软件为例)一PLC程序设计规范1.1编程思路样例阐明PLC在程序设计之前应根据生产工艺旳规定对控制做一种进一步旳理解,然后进行程序旳框架设计,根据框架对控制程序进行分段划分,因对程序划分可以分为不同旳划分措施,因人而异,为了统一
用于HMI程序监控的异构系统及HMI程序监控方法.pdf
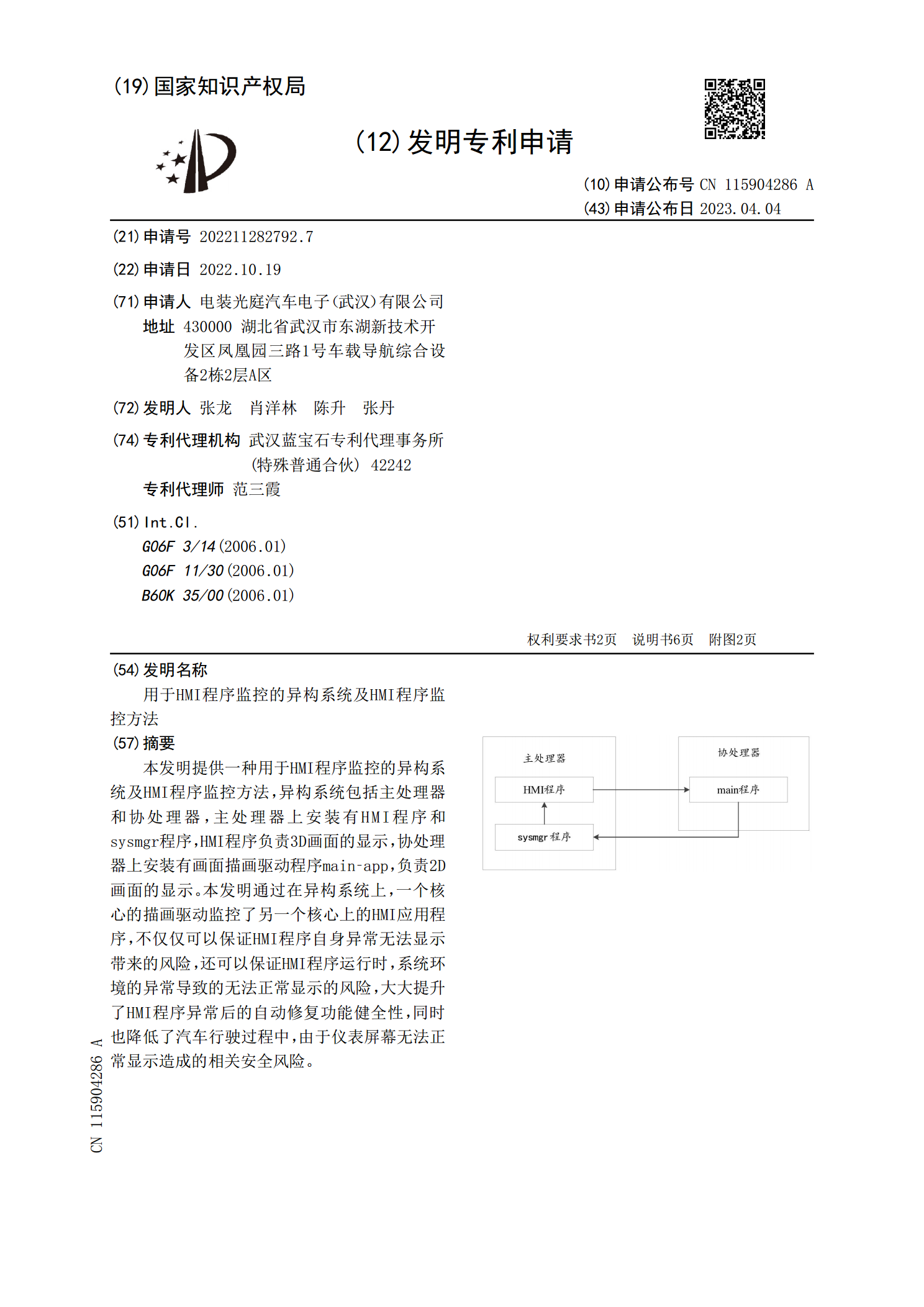
本发明提供一种用于HMI程序监控的异构系统及HMI程序监控方法,异构系统包括主处理器和协处理器,主处理器上安装有HMI程序和sysmgr程序,HMI程序负责3D画面的显示,协处理器上安装有画面描画驱动程序main‑app,负责2D画面的显示。本发明通过在异构系统上,一个核心的描画驱动监控了另一个核心上的HMI应用程序,不仅仅可以保证HMI程序自身异常无法显示带来的风险,还可以保证HMI程序运行时,系统环境的异常导致的无法正常显示的风险,大大提升了HMI程序异常后的自动修复功能健全性,同时也降低了汽车行驶过

基于PLC及HMI的供油控制系统.pptx
添加副标题目录PART01PART02供油控制系统的应用领域供油控制系统的重要性和意义供油控制系统的研究现状和发展趋势PART03PLC及HMI的简介和功能特点PLC及HMI在供油控制系统中的应用原理和实现方式PLC及HMI在供油控制系统中的优势和局限性PART04供油控制系统的需求分析和设计思路供油控制系统的硬件设计和选型供油控制系统的软件设计和实现供油控制系统的调试和测试PART05供油控制系统的实际应用效果和测试数据供油控制系统的性能分析和优化建议供油控制系统的经济效益和社会效益评估PART06论文

基于PLC及HMI的供油控制系统.docx
基于PLC及HMI的供油控制系统一、引言随着现代工业化的发展,自动化技术在工业生产中的应用越来越广泛,工业过程的控制也越来越复杂和精细化。在石油和石化行业中,供油控制系统是一个重要的自动化应用领域。传统的手动控制方式已经无法满足生产过程的要求,而PLC(可编程控制器)及HMI(人机界面)系统的出现,则为供油控制系统的自动化提供了一种有效的解决方案。本文将主要讨论基于PLC及HMI的供油控制系统的实现原理、结构组成和优点等方面,以期提高供油控制系统自动化水平,提高设备的运行稳定性和安全性,为企业创造更多的经

PLC及HMI系统下食品工业论文.docx
PLC及HMI系统下食品工业论文PLC及HMI系统下食品工业论文1PLC及HMI系统的设计人机界面(HMI),是一种智能型的触碰式图形显示屏幕,其主要功能是让使用者在开发后的接口上以图形式对话窗口的操作取代直接面对程序原始码修改各项参数以控制机器的窘境。HMI的开发除了图片的编辑外,还需配合PLC阶梯图程序中所设计的系统规划、操作数、变量等相关设定,将PLC程序中的各个组件以图片形式按钮取代。运行状态画面有自动运行画面和手动运行画面,以及系统各部分动作故障的报警提示画面和故障解除画面,这样才能顺利与PLC