
一种图像深度估计方法、装置、电子设备及存储介质.pdf

玉环****找我


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种图像深度估计方法、装置、电子设备及存储介质.pdf
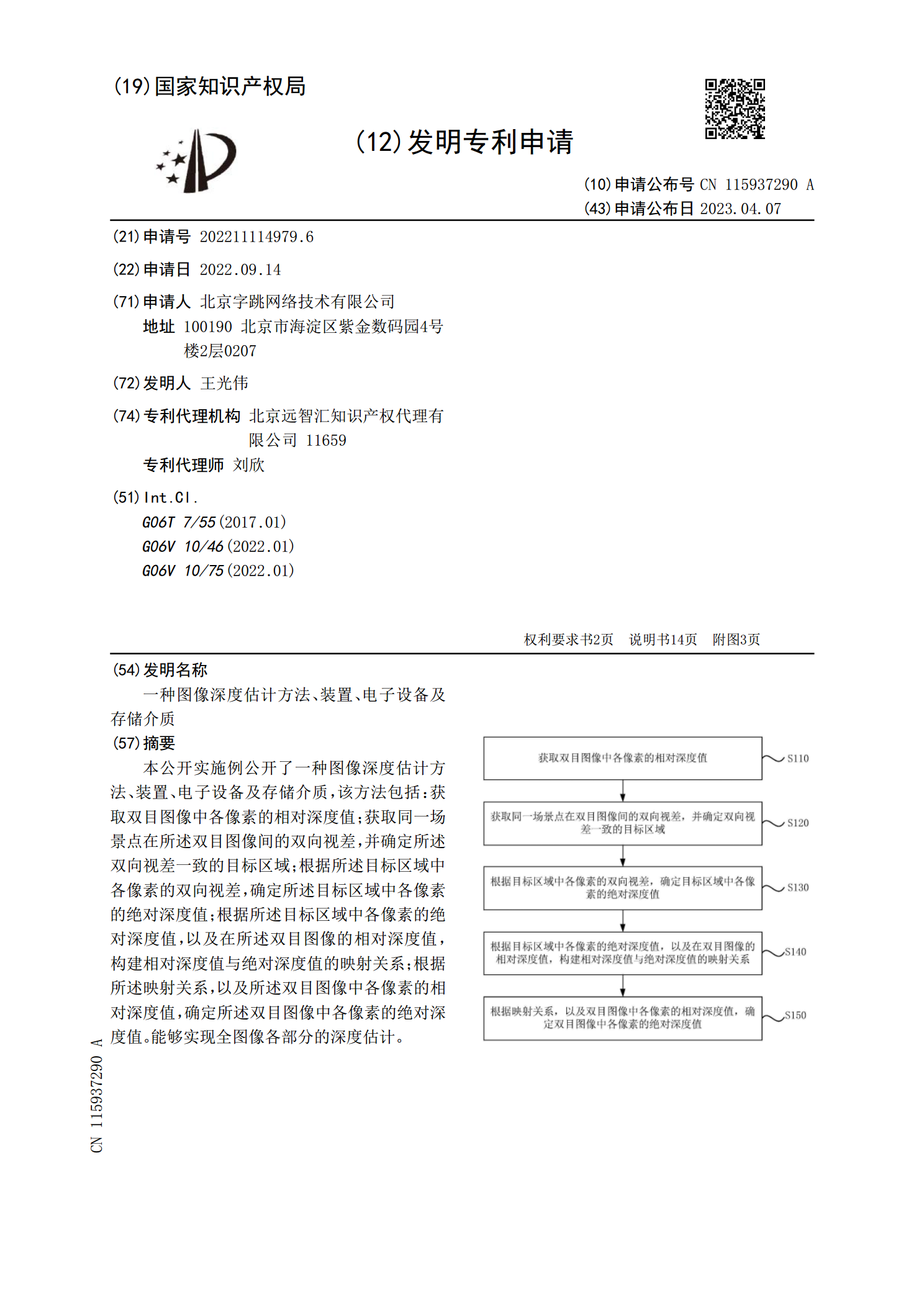
本公开实施例公开了一种图像深度估计方法、装置、电子设备及存储介质,该方法包括:获取双目图像中各像素的相对深度值;获取同一场景点在所述双目图像间的双向视差,并确定所述双向视差一致的目标区域;根据所述目标区域中各像素的双向视差,确定所述目标区域中各像素的绝对深度值;根据所述目标区域中各像素的绝对深度值,以及在所述双目图像的相对深度值,构建相对深度值与绝对深度值的映射关系;根据所述映射关系,以及所述双目图像中各像素的相对深度值,确定所述双目图像中各像素的绝对深度值。能够实现全图像各部分的深度估计。
图像噪声程度估计方法、装置、电子设备及存储介质.pdf
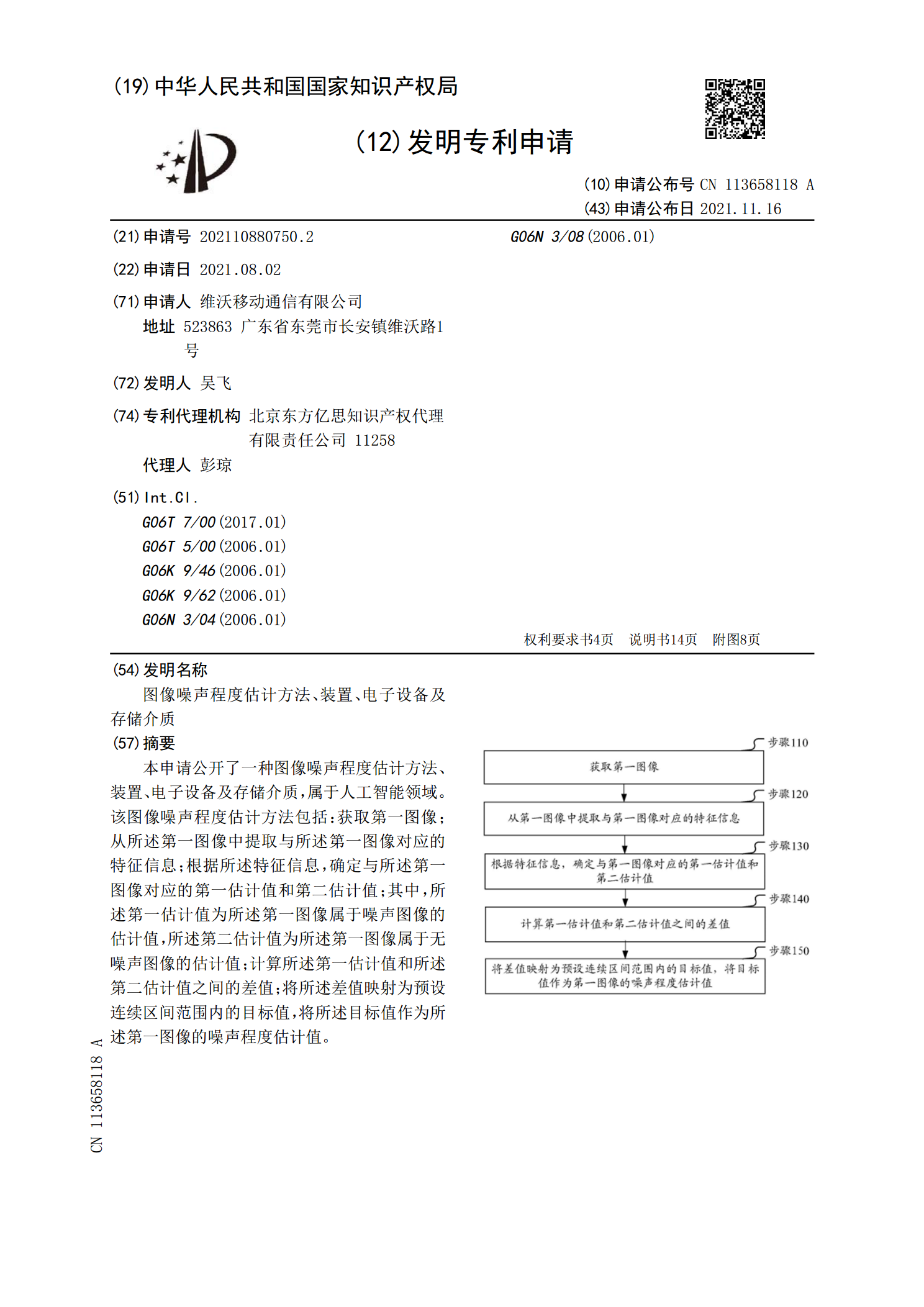
本申请公开了一种图像噪声程度估计方法、装置、电子设备及存储介质,属于人工智能领域。该图像噪声程度估计方法包括:获取第一图像;从所述第一图像中提取与所述第一图像对应的特征信息;根据所述特征信息,确定与所述第一图像对应的第一估计值和第二估计值;其中,所述第一估计值为所述第一图像属于噪声图像的估计值,所述第二估计值为所述第一图像属于无噪声图像的估计值;计算所述第一估计值和所述第二估计值之间的差值;将所述差值映射为预设连续区间范围内的目标值,将所述目标值作为所述第一图像的噪声程度估计值。

一种深度估计方法、装置、电子设备以及存储介质.pdf
本公开提供了一种深度估计方法、装置、电子设备以及存储介质,本公开基于获取到的目标像素点对应的光子的目标飞行时间,对目标像素点对应的飞行时间分布信息进行更新,之后,利用更新后的飞行时间分布信息,确定目标像素点对应的目标对象的深度信息,避免了对目标像素点进行直方图积累,只需要存储飞行时间分布信息即可测距,有效节省了存储空间,降低了通信带宽,并且由于不需要进行直方图的积累,因此,可以节省累积时间,提高测距效率。
深度估计模型的训练方法、装置、电子设备及存储介质.pdf
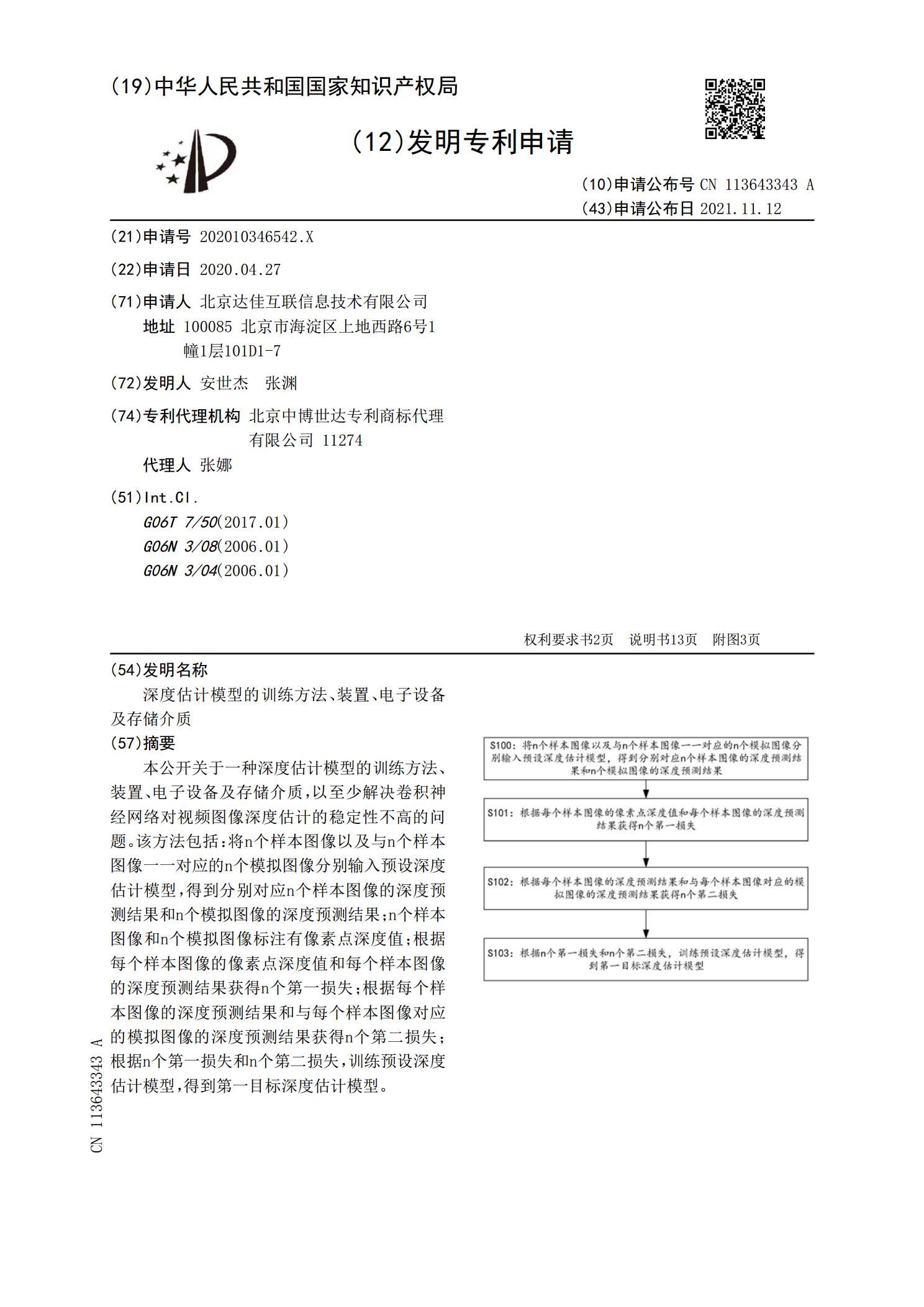
本公开关于一种深度估计模型的训练方法、装置、电子设备及存储介质,以至少解决卷积神经网络对视频图像深度估计的稳定性不高的问题。该方法包括:将n个样本图像以及与n个样本图像一一对应的n个模拟图像分别输入预设深度估计模型,得到分别对应n个样本图像的深度预测结果和n个模拟图像的深度预测结果;n个样本图像和n个模拟图像标注有像素点深度值;根据每个样本图像的像素点深度值和每个样本图像的深度预测结果获得n个第一损失;根据每个样本图像的深度预测结果和与每个样本图像对应的模拟图像的深度预测结果获得n个第二损失;根据n个第一
一种姿态估计方法、装置、电子设备及存储介质.pdf
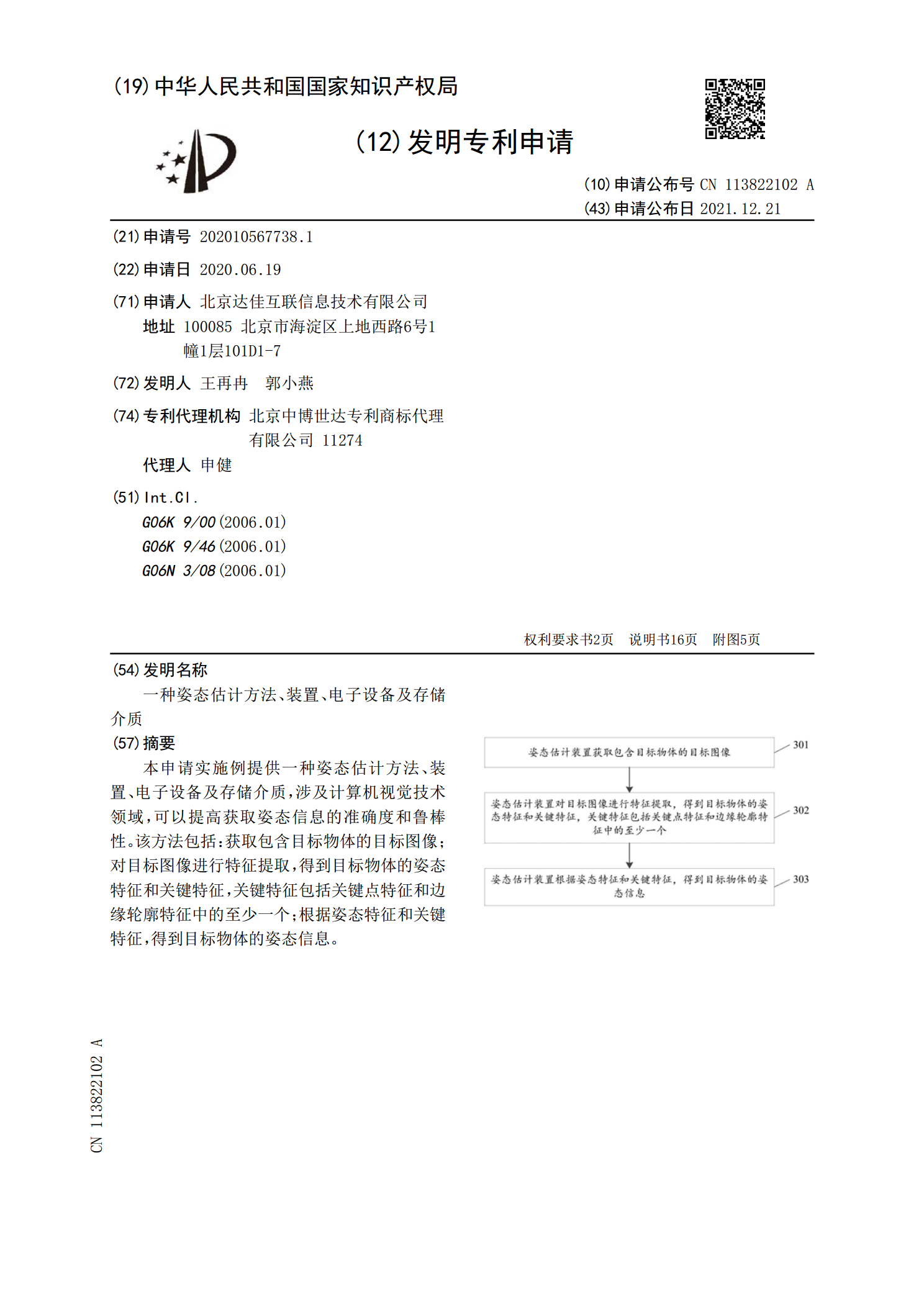
本申请实施例提供一种姿态估计方法、装置、电子设备及存储介质,涉及计算机视觉技术领域,可以提高获取姿态信息的准确度和鲁棒性。该方法包括:获取包含目标物体的目标图像;对目标图像进行特征提取,得到目标物体的姿态特征和关键特征,关键特征包括关键点特征和边缘轮廓特征中的至少一个;根据姿态特征和关键特征,得到目标物体的姿态信息。