
相位恢复成像装置和成像方法.pdf

和裕****az

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
相位恢复成像装置和成像方法.pdf
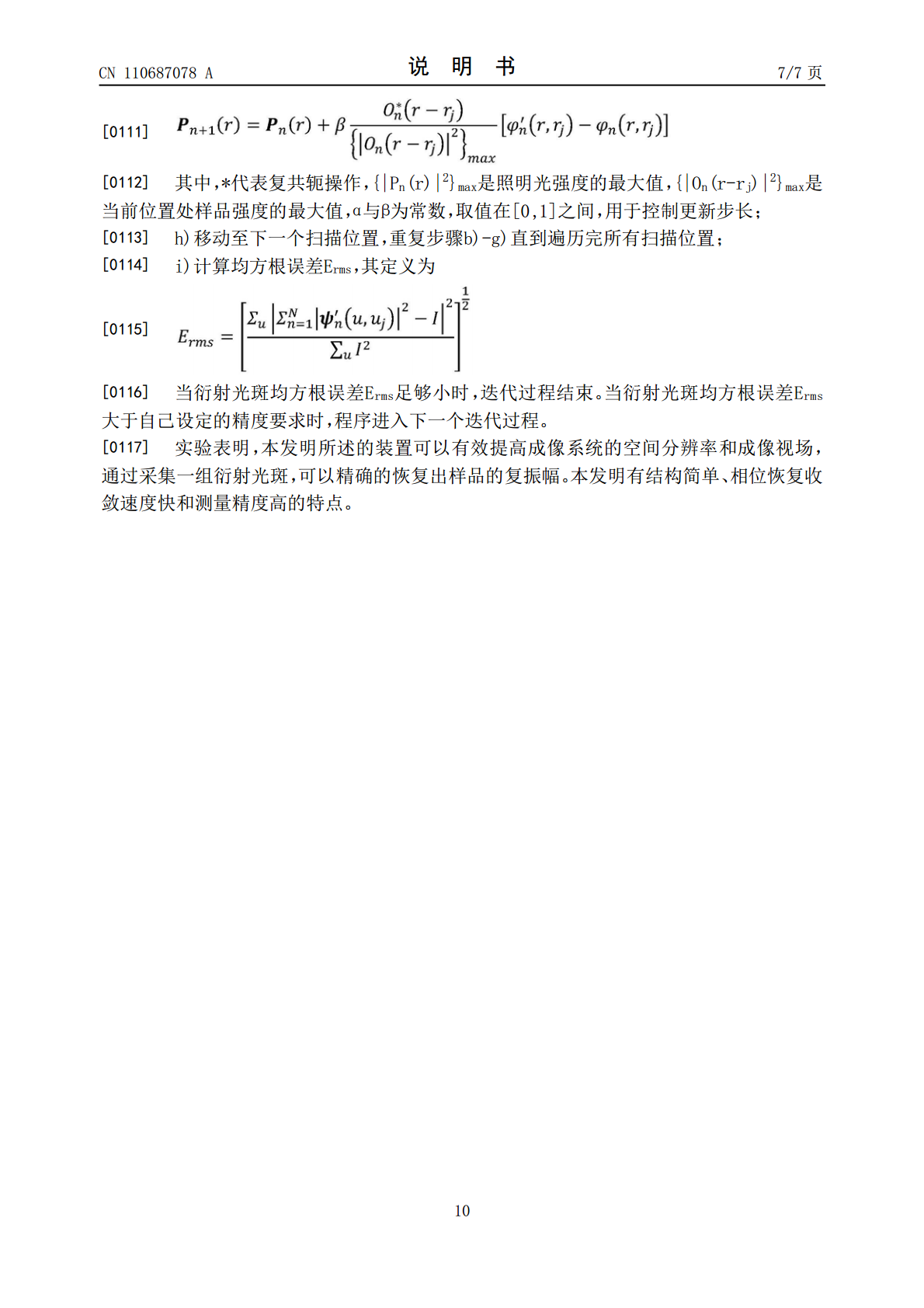
一种相位恢复成像装置和成像方法,包括光源、光纤、变焦光纤准直器、聚焦透镜、二维位移平台、第一鱼眼轴承、第二鱼眼轴承、空心管道、样品、二维光电探测器、电脑以及数据采集与处理软件。通过变焦光纤准直器将光束的焦点调节到第一鱼眼轴承的球心处,第一鱼眼轴承作为一个支撑点;第二鱼眼轴承与二维位移平台相连接;通过控制二维位移平台,使激光束绕其焦点转动,样品上的每一个扫描位置都与周围的扫描位置有重叠,从而提高系统的成像分辨率和视场。二维光电探测器用来记录衍射斑,由二维位移平台的位置信息计算出每一幅衍射斑的角度信息,利用迭

一种基于叠层成像的无透镜成像装置及其相位恢复方法.pdf
本发明提供一种基于叠层成像的无透镜成像装置及其相位恢复方法。装置包括激光、样本、样本夹持装置、电机、散射层以及图像传感器。在成像过程中不断使用电机在水平方向上移动样本的位置,散射层用于调制激光照射样本后产生的出射光。同时保持样本和图像传感器之间的相对距离保持不变,用图像传感器记录下样本在不同位置下所成的图像,采集200张图像后,使用二维互相关算法和rPIE算法恢复散射层的轮廓以及样本的轮廓。二维互相关算法和rPIE算法使用MATLAB2018a软件实现。本发明在样本和图像传感器间添加一个散射层,可以用来

成像装置和成像方法.pdf
本发明提供了一种成像装置以及成像方法,该成像装置包括:显影单元,其利用包含调色剂的显影剂将形成在图像保持部件上的静电荷图像显影;中间转印部件;和导向单元,其将图像保持部件和中间转印部件中的至少一者导向至一次转印位置,从而使得图像保持部件的表面的一部分与中间转印部件的表面的一部分彼此跟随,其中所述调色剂具有由包含粘结剂树脂的海部和包含防粘剂的岛部构成的海-岛结构,并且包含防粘剂的岛部的偏心度B分布中的最大频率值以及偏心度B分布中的偏斜度分别落入在本发明书描述的特定范围内。
成像装置和成像方法.pdf
本发明提供了一种成像装置和成像方法,该成像装置包括电子照相感光体、充电单元、静电潜像形成单元、储存包含调色剂的显影剂的显影单元、转印单元、清洁单元和定影单元,其中所述调色剂具有由包含粘结剂树脂的海部和包含防粘剂的岛部构成的海-岛结构,包含防粘剂的岛部的偏心度B分布中的最大频率值在0.75至0.95的范围内,并且偏心度B分布中的偏斜度在-1.10至-0.50的范围内。本发明的成像装置可抑制感光体成膜而不需要增加调色剂中的防粘剂含量。

成像装置、成像系统和成像方法.pdf
一种成像装置包括:成像单元,配置为拍摄多个图像,该成像单元包括:多个成像部件,每个配置为获取与所拍摄的多个图像中的一个图像相关的成像数据项,以及布线部件,配置为传输多个成像部件获取的多个成像数据项。该布线部件包括:外部部件,形成布线部件的轮廓;以及线缆部件,布置在外部部件的内部。多个成像部件沿着布线部件的纵向布置,并且配置成像单元,以获取对应于多个成像位置的多个成像数据项,并且利用线缆部件传输多个成像数据项。