
一种俯卧自动化调节辅助医疗机械装置.pdf

书生****专家

1/10
2/10
3/10
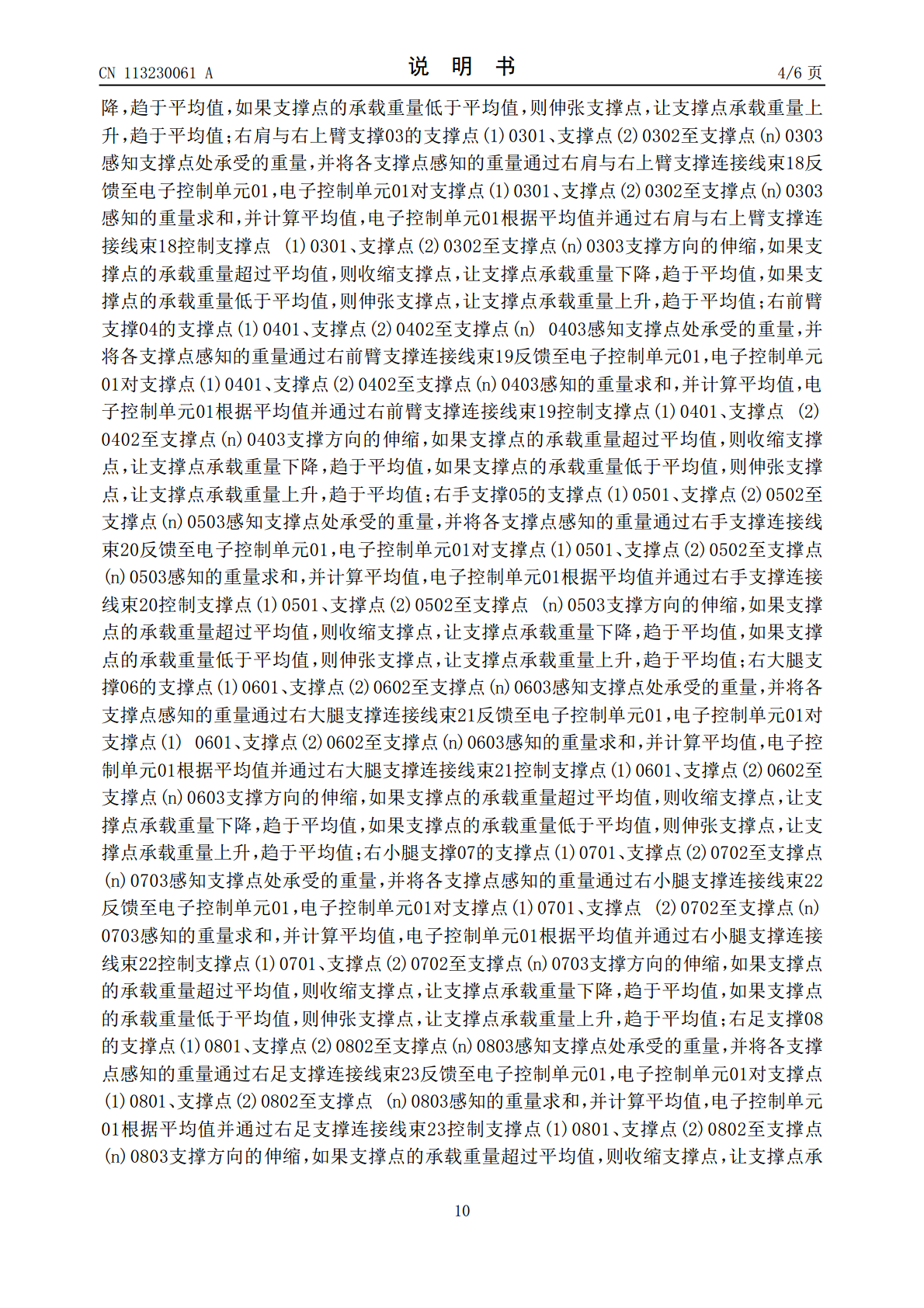
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种俯卧自动化调节辅助医疗机械装置.pdf
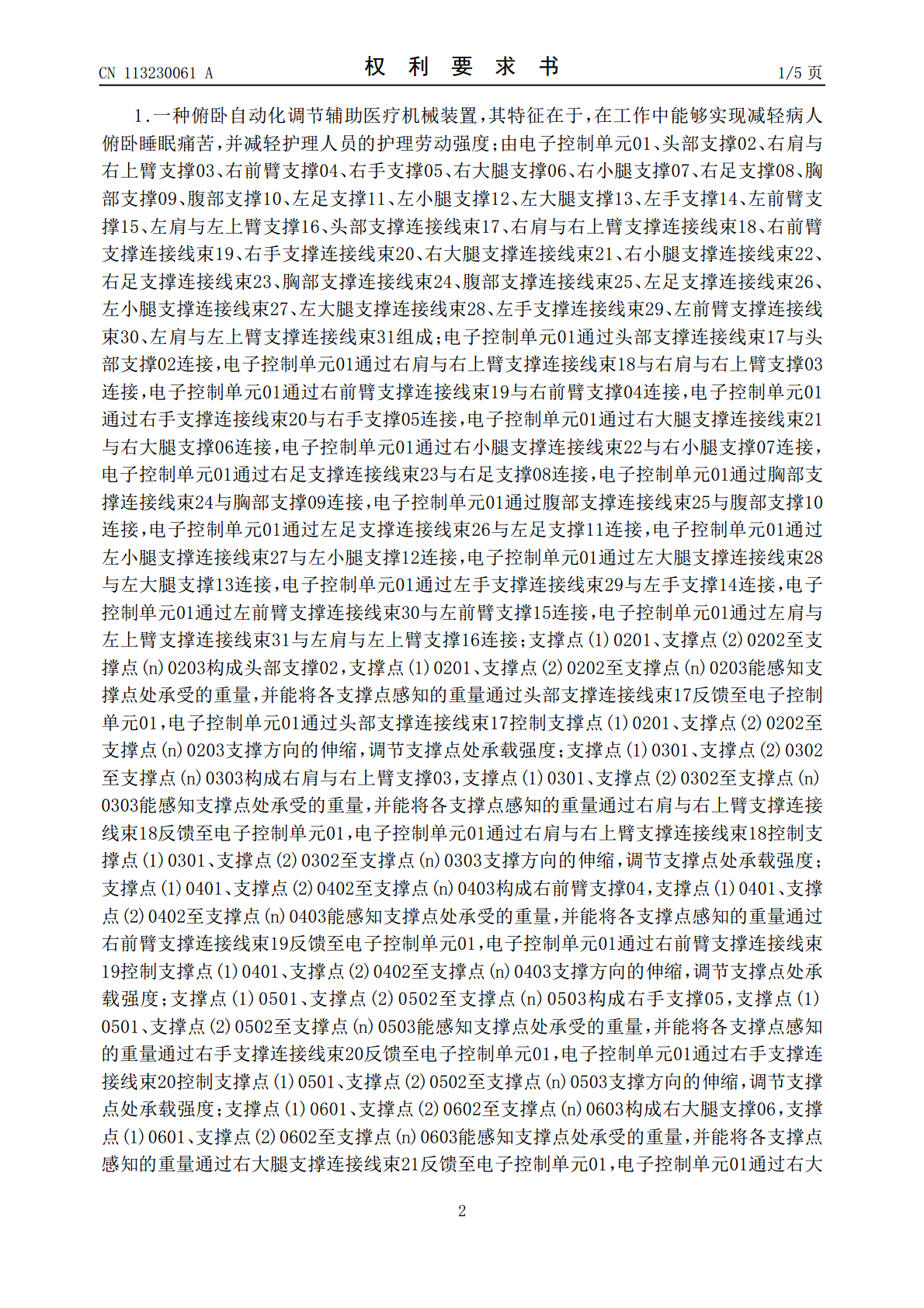
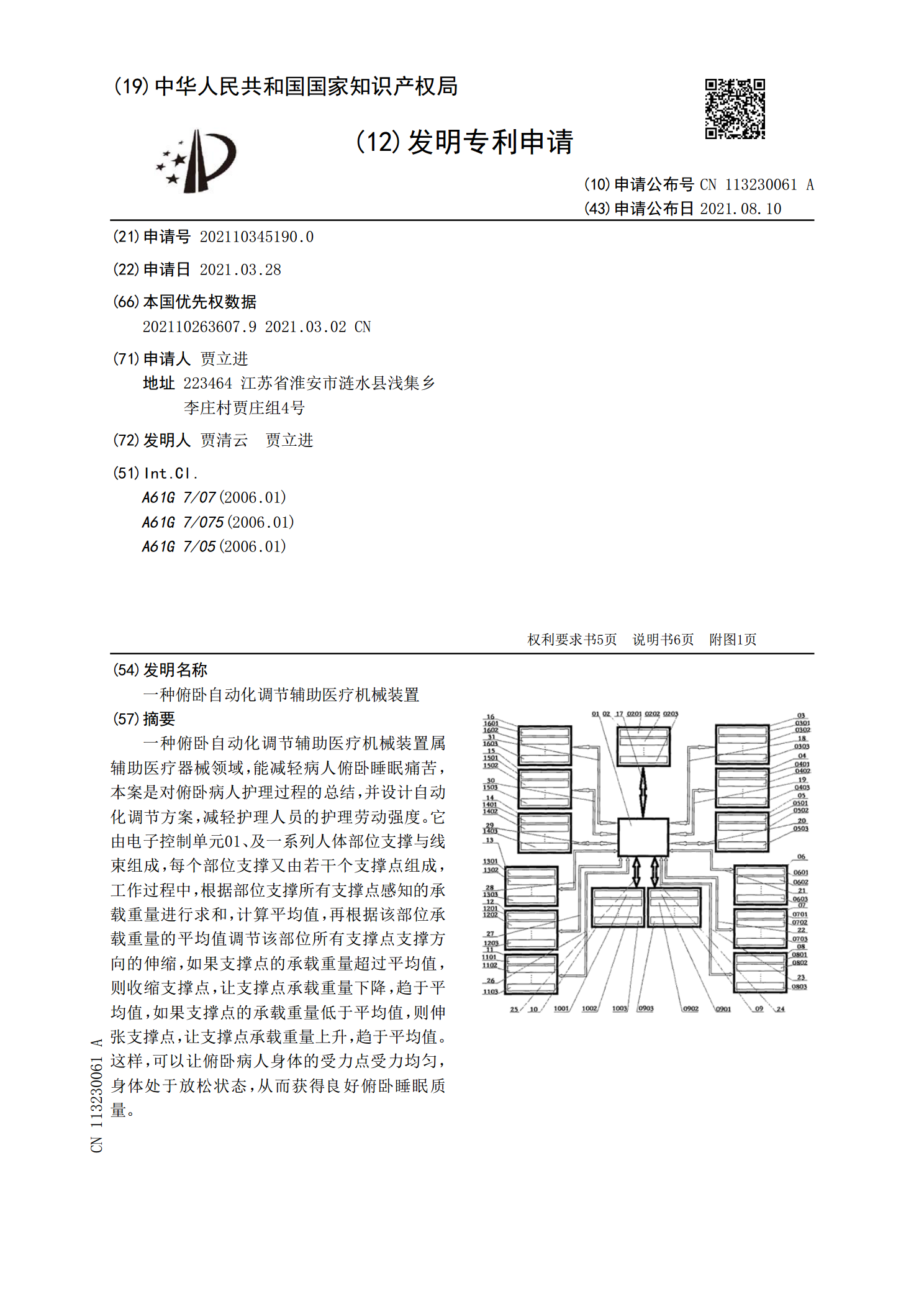
一种俯卧自动化调节辅助医疗机械装置属辅助医疗器械领域,能减轻病人俯卧睡眠痛苦,本案是对俯卧病人护理过程的总结,并设计自动化调节方案,减轻护理人员的护理劳动强度。它由电子控制单元01、及一系列人体部位支撑与线束组成,每个部位支撑又由若干个支撑点组成,工作过程中,根据部位支撑所有支撑点感知的承载重量进行求和,计算平均值,再根据该部位承载重量的平均值调节该部位所有支撑点支撑方向的伸缩,如果支撑点的承载重量超过平均值,则收缩支撑点,让支撑点承载重量下降,趋于平均值,如果支撑点的承载重量低于平均值,则伸张支撑点,让

一种气管插管患者辅助俯卧装置.pdf
本发明涉及一种气管插管患者辅助俯卧装置,至少包括能够支撑患者颈部的第一支撑体,第一支撑体连接有能够限定患者头部的支撑位置的第二支撑体,第二支撑体通过选择性地改变其工作位置的方式使得其与第一支撑体共同限定出能够使得患者的气道与气管插管相对准的俯卧姿态,第一支撑体和第二支撑体内均设置有能够对颈部和头部是否发生压力性损伤进行监测的传感单元,传感单元能够通过获取第一支撑体和第二支撑体表面的压力以及受压区域的面积的方式分析患者在俯卧姿态下头颈部位的受力情况,并且处理单元通过判断第一支撑体与第二支撑体之间的压力比是否
一种健身用俯卧撑辅助装置.pdf
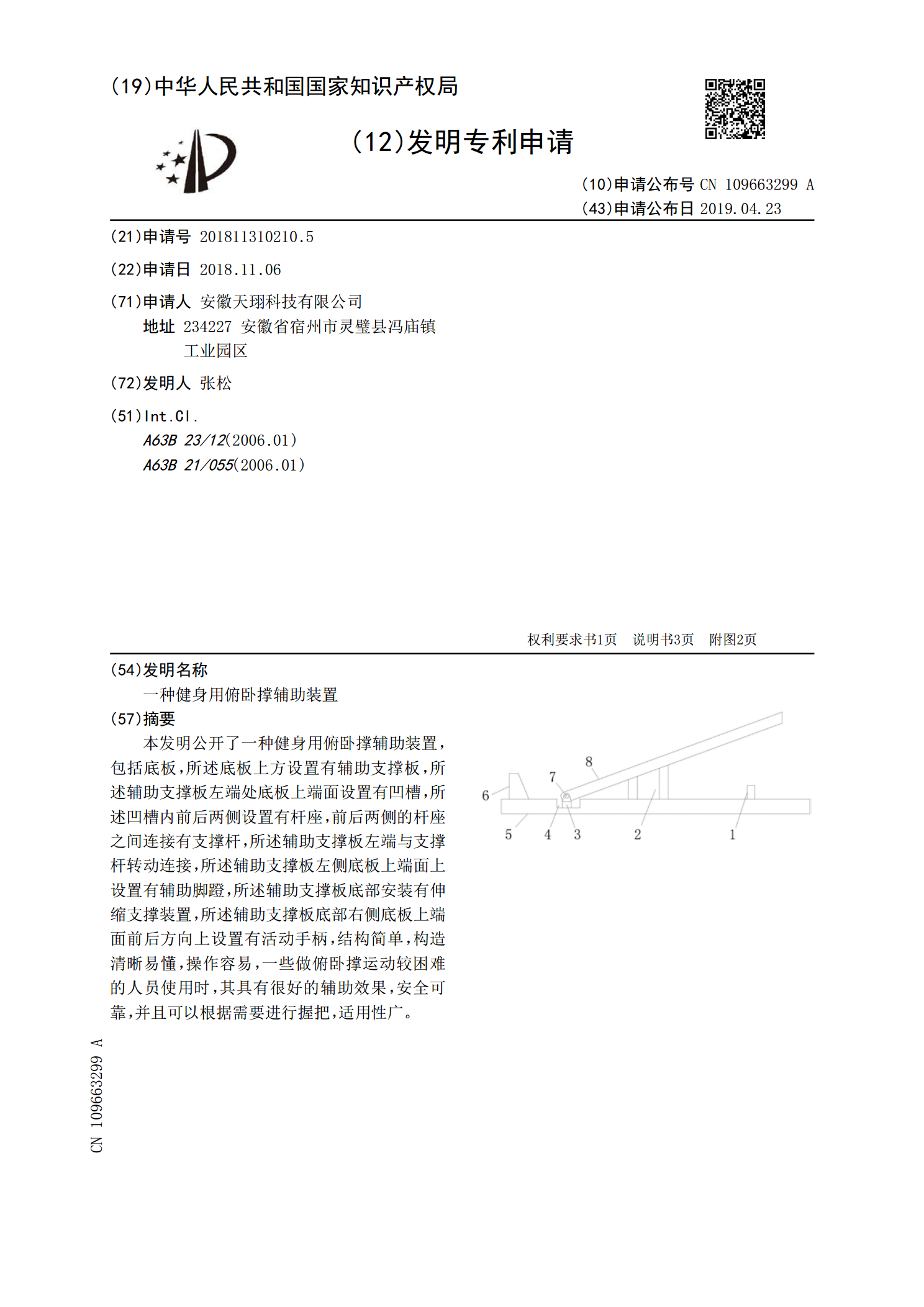
本发明公开了一种健身用俯卧撑辅助装置,包括底板,所述底板上方设置有辅助支撑板,所述辅助支撑板左端处底板上端面设置有凹槽,所述凹槽内前后两侧设置有杆座,前后两侧的杆座之间连接有支撑杆,所述辅助支撑板左端与支撑杆转动连接,所述辅助支撑板左侧底板上端面上设置有辅助脚蹬,所述辅助支撑板底部安装有伸缩支撑装置,所述辅助支撑板底部右侧底板上端面前后方向上设置有活动手柄,结构简单,构造清晰易懂,操作容易,一些做俯卧撑运动较困难的人员使用时,其具有很好的辅助效果,安全可靠,并且可以根据需要进行握把,适用性广。
一种手机覆膜自动化辅助校正调节装置.pdf
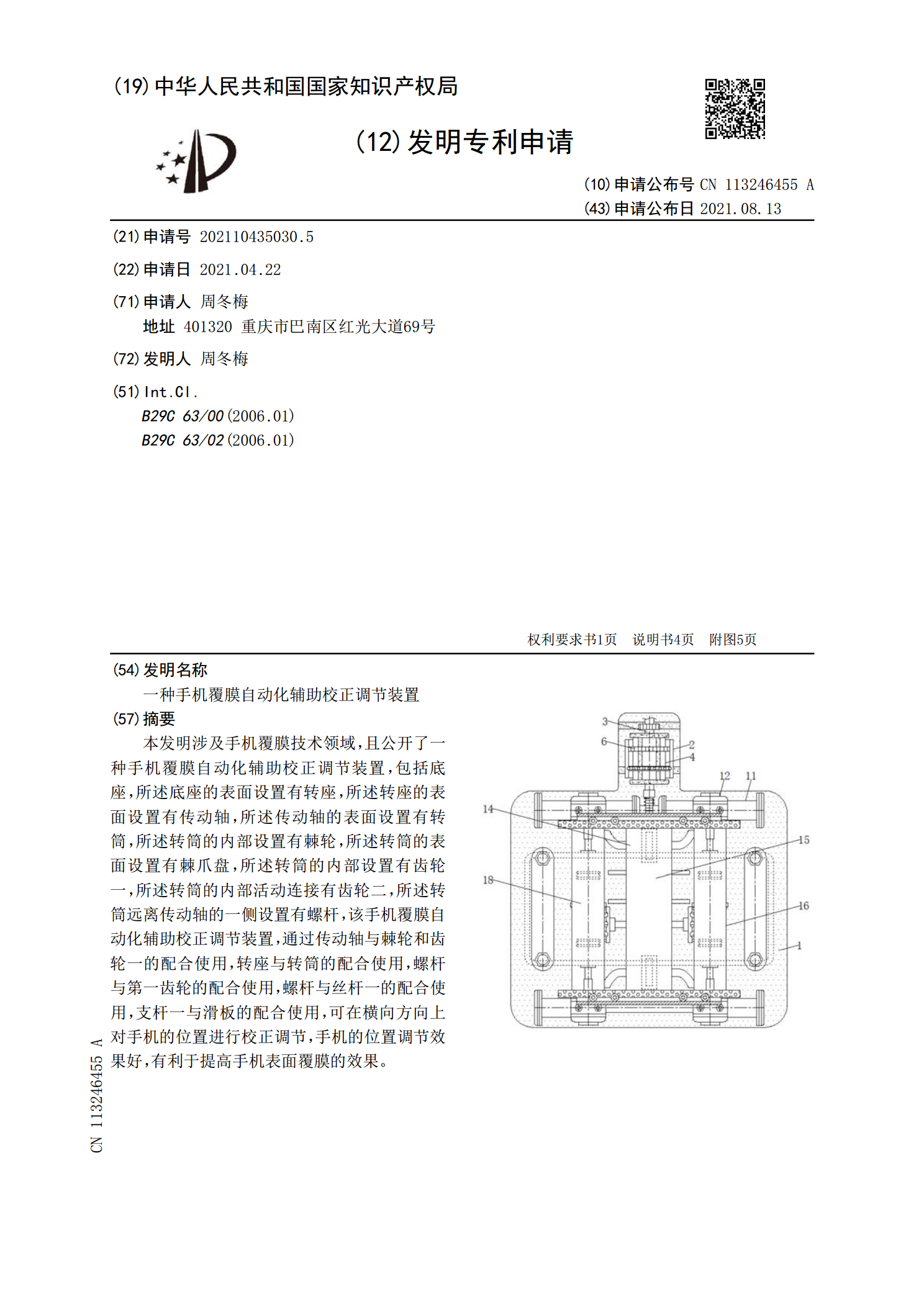
本发明涉及手机覆膜技术领域,且公开了一种手机覆膜自动化辅助校正调节装置,包括底座,所述底座的表面设置有转座,所述转座的表面设置有传动轴,所述传动轴的表面设置有转筒,所述转筒的内部设置有棘轮,所述转筒的表面设置有棘爪盘,所述转筒的内部设置有齿轮一,所述转筒的内部活动连接有齿轮二,所述转筒远离传动轴的一侧设置有螺杆,该手机覆膜自动化辅助校正调节装置,通过传动轴与棘轮和齿轮一的配合使用,转座与转筒的配合使用,螺杆与第一齿轮的配合使用,螺杆与丝杆一的配合使用,支杆一与滑板的配合使用,可在横向方向上对手机的位置进行

一种用于机械加工快速调节式划线辅助装置.pdf
本发明提供一种用于机械加工快速调节式划线辅助装置,包括底座,主动夹块,辅助滑块,齿条组,伸缩驱动件,置物台,角度调节台,连杆,变速夹,定位销;所述底座的表面四处方孔上活动连接有四处变速机构;所述主动夹块滑动连接在底座上表面两侧的主导杆上;所述辅助滑块滑动连接在底座上表面的两处副导杆上;所述齿条组分两处通过焊接固定连接在主动夹块的两侧,且齿条组啮合连接变速机构;所述伸缩驱动件分两处固定连接在底座的两处主导杆末端;可以看出,此划线用夹紧设备实现了每进行一组夹紧和复位时,均可实现工件调节一定角度,且可选择单次调