
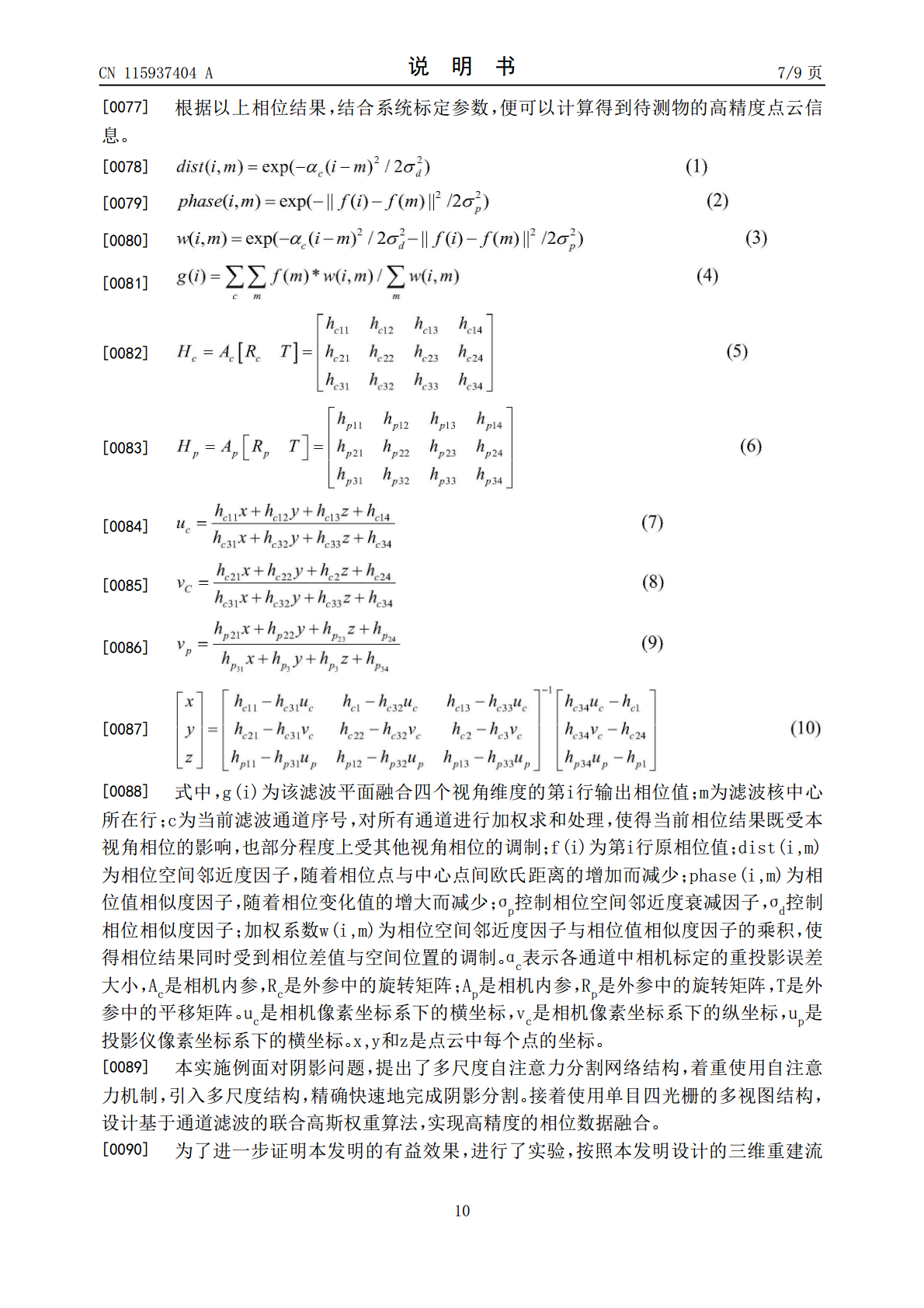
基于多视图阴影分割的光栅三维重建系统及方法.pdf

明钰****甜甜

1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多视图阴影分割的光栅三维重建系统及方法.pdf
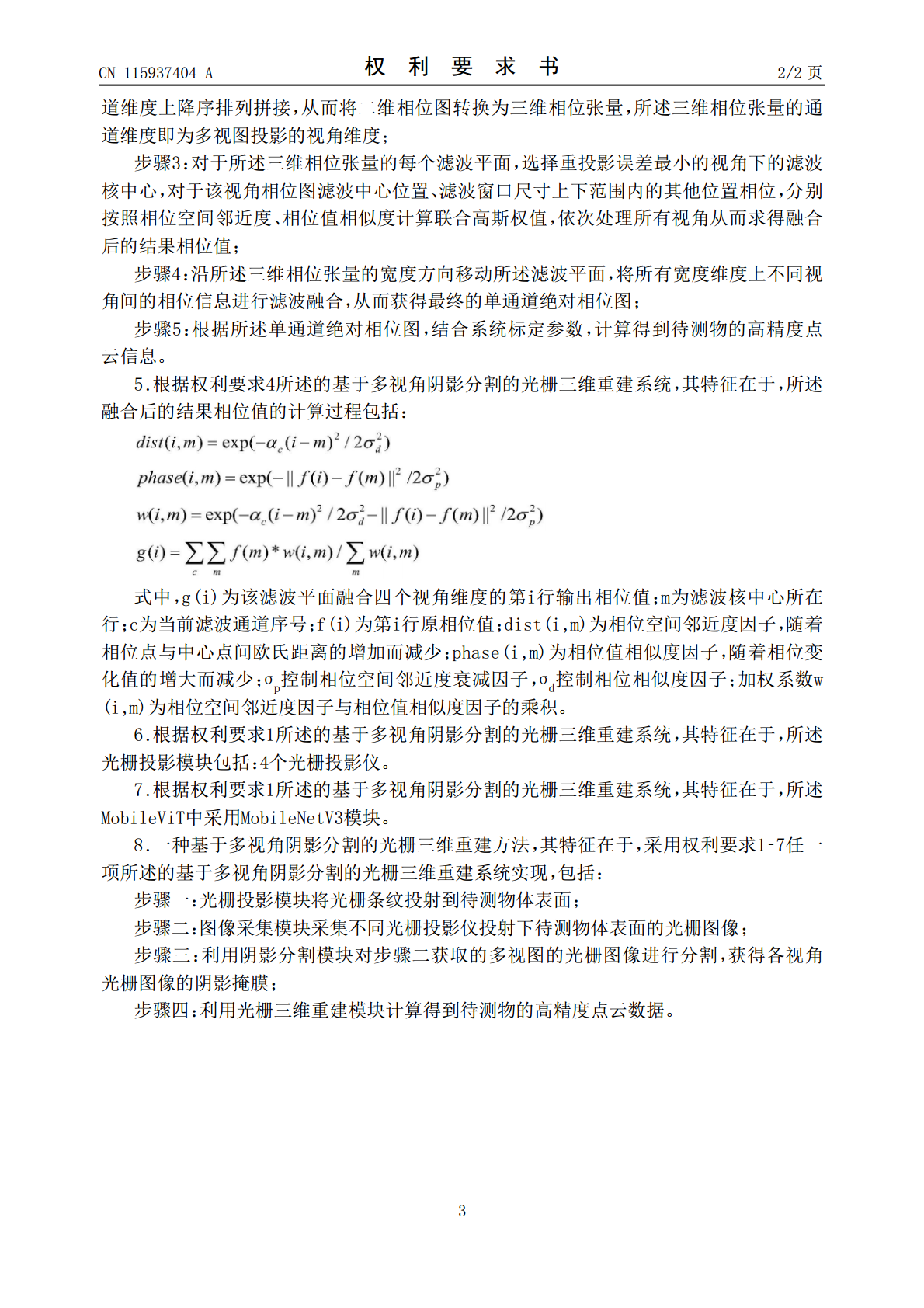
本发明公开了基于多视图阴影分割的光栅三维重建系统及方法,属于光学三维重建领域。本发明提出了多尺度自注意力分割网络结构,着重使用自注意力机制,引入多尺度结构,精确快速地完成阴影分割;本发明的多视图阴影分割三维重建方法,可以实现高精度相位数据的融合,解决了现有光栅投影三维重建方法中阴影对于重建结果的影响。相比于现有方案,本发明抑制干扰能力强、精度高,可以准确识别阴影区域,并去除由于阴影导致的相位噪声,生成高精度的多视图融合相位,能够满足工厂对于PCB部分三维缺陷检测的精度要求,对提高生产的自动化水平起到了一定

基于多视图三维重建方法在实验室系统中的应用研究.docx
基于多视图三维重建方法在实验室系统中的应用研究摘要本文研究了多视图三维重建方法在实验室系统中的应用。首先,介绍了多视图三维重建方法的基本原理和流程,然后详细阐述了在实验室系统中使用多视图三维重建方法的优势和应用场景,包括对实验室设备的检测、维修和改进等方面的应用。接着,介绍了本文所使用的多视图三维重建方法,并对实验室系统中的应用进行了实验验证,结果表明该方法有效可靠。最后,总结了本文的研究成果,并对未来的研究方向进行了展望。关键词:多视图三维重建;实验室系统;应用;优势;场景引言多视图三维重建是一种基于多
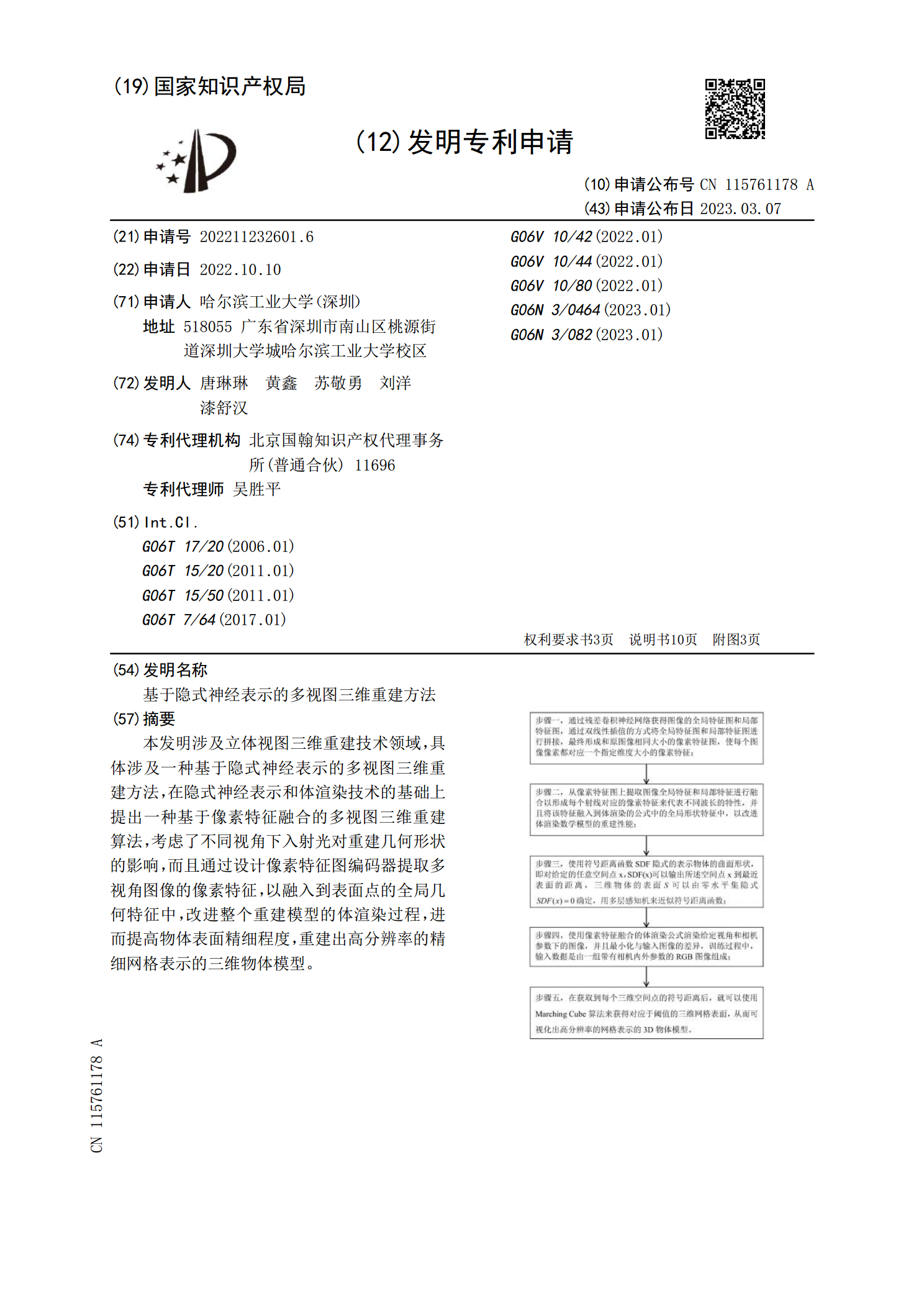
基于隐式神经表示的多视图三维重建方法.pdf
本发明涉及立体视图三维重建技术领域,具体涉及一种基于隐式神经表示的多视图三维重建方法,在隐式神经表示和体渲染技术的基础上提出一种基于像素特征融合的多视图三维重建算法,考虑了不同视角下入射光对重建几何形状的影响,而且通过设计像素特征图编码器提取多视角图像的像素特征,以融入到表面点的全局几何特征中,改进整个重建模型的体渲染过程,进而提高物体表面精细程度,重建出高分辨率的精细网格表示的三维物体模型。

视频中阴影连接的多车辆分割方法.pdf
本发明公开了一种视频中阴影连接的多车辆分割方法,对图像的车辆区域进行边缘运算,然后对运算后的图像进行比较、判断,通过边缘信息消除阴影的外轮廓,然后通过形态学的方法消除车辆阴影,因边缘信息主要集中在阴影的外轮廓部分,通过图像差分从而实现消除阴影的目的,同时由于车辆边缘信息比较丰富,而且边缘信息对光照变化不敏感,所以具有普适性。

一种基于AKAZE算法的多视图几何三维重建方法.docx
一种基于AKAZE算法的多视图几何三维重建方法基于AKAZE算法的多视图几何三维重建方法摘要:随着计算机视觉技术的快速发展,多视图几何三维重建成为了一个热门的研究方向。本论文提出了一种基于AKAZE(Accelerated-Kaze)算法的多视图几何三维重建方法。AKAZE是一种快速的特征点提取和匹配算法,具有在大规模变形和噪声环境下鲁棒性强的优势。我们将AKAZE算法与三维重建框架相结合,提出了一种高效且准确的多视图几何三维重建方法。实验结果表明,该方法能够有效地重建出高质量的三维模型。关键词:多视图几