
一种多无人机网络覆盖优化方法.pdf

醉香****mm

1/10
2/10

3/10
4/10
5/10

6/10

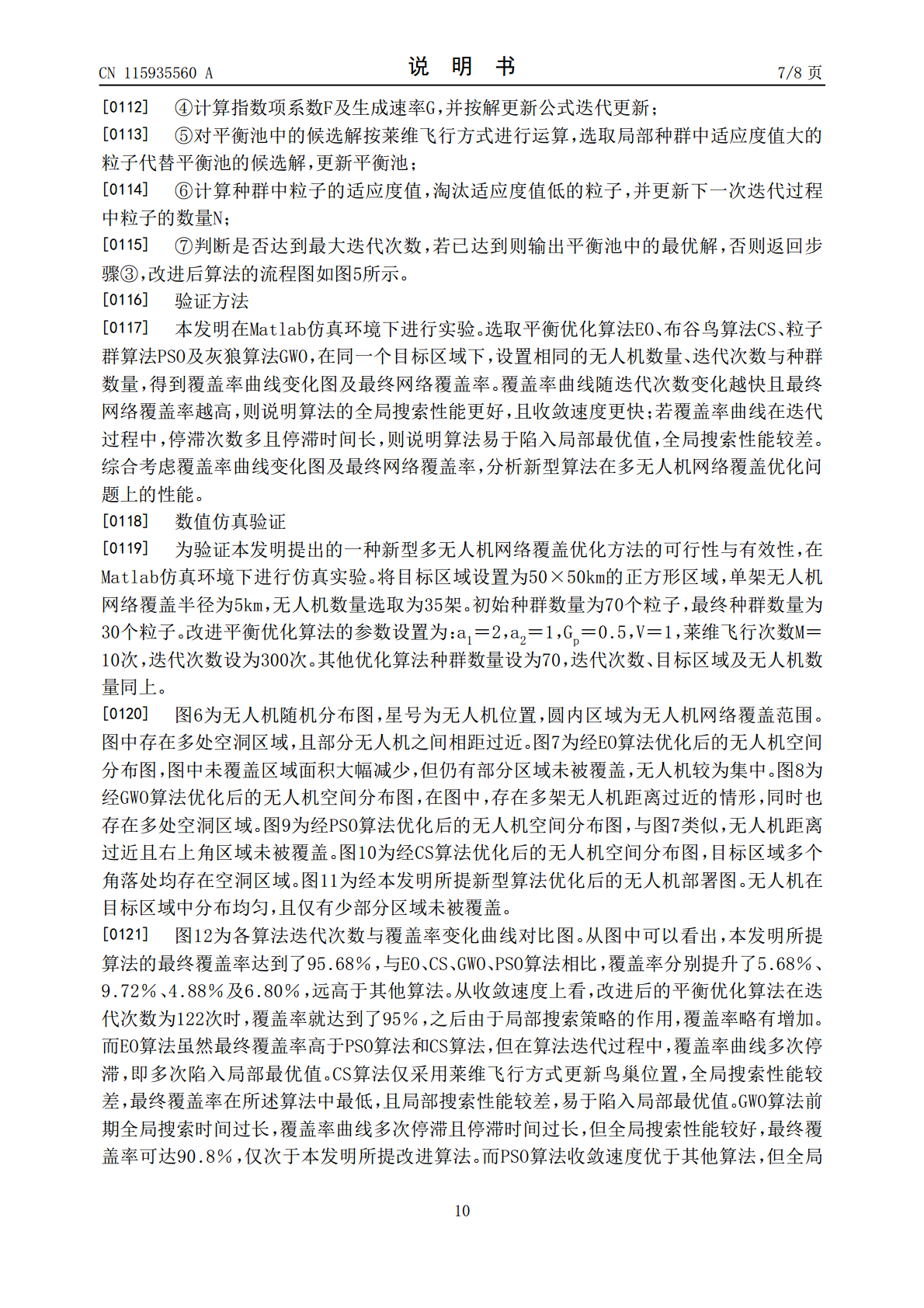
7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多无人机网络覆盖优化方法.pdf
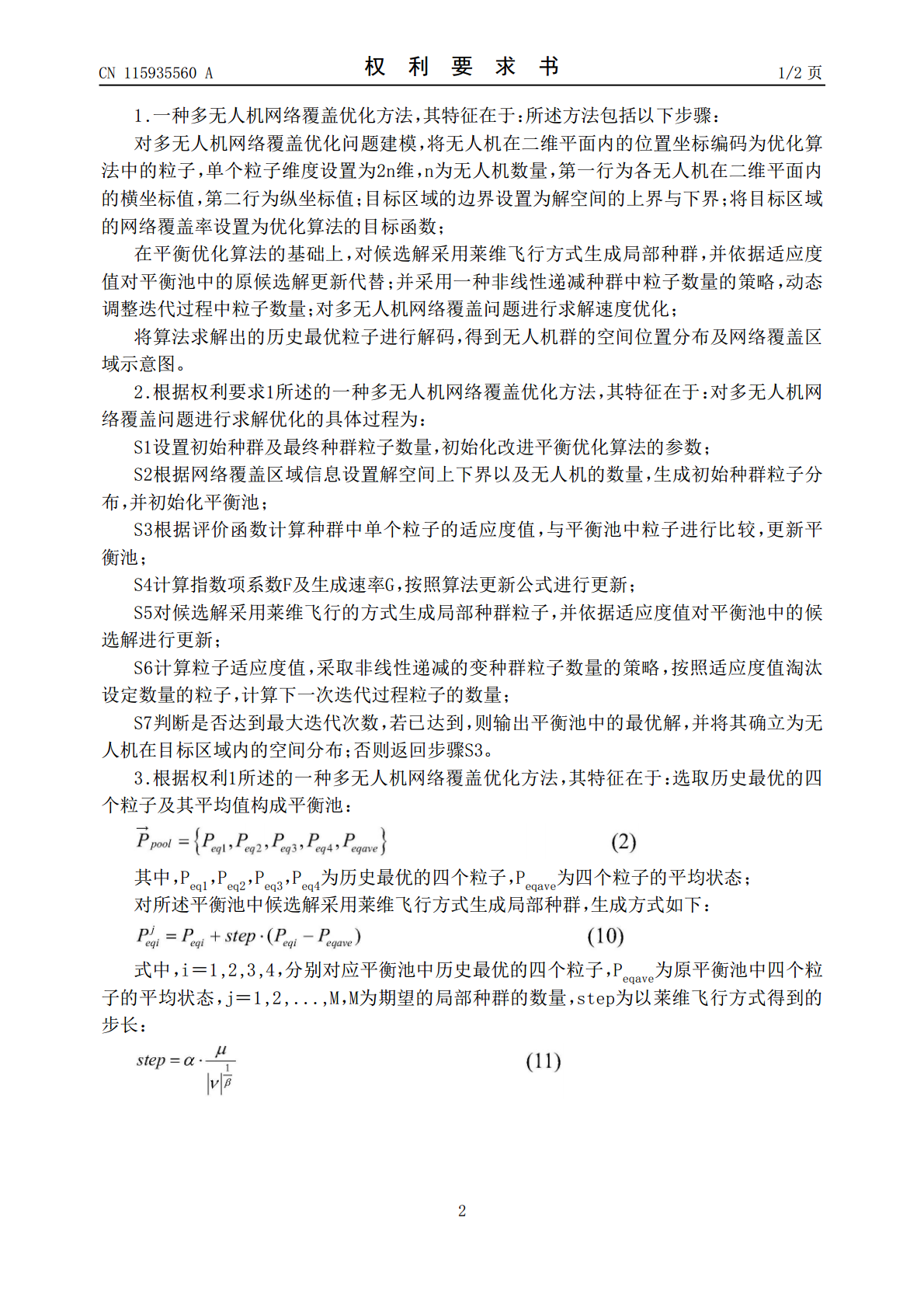
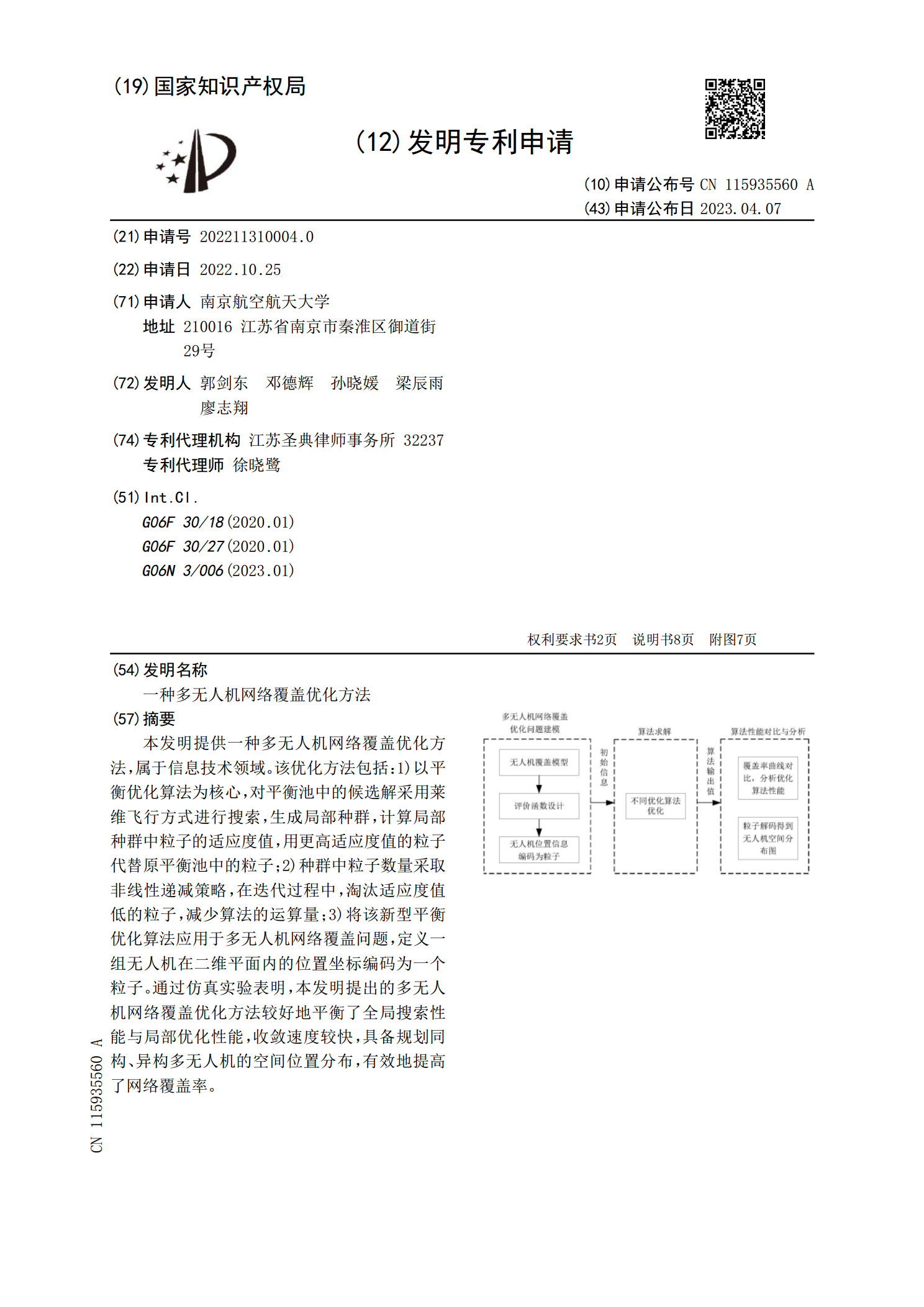
本发明提供一种多无人机网络覆盖优化方法,属于信息技术领域。该优化方法包括:1)以平衡优化算法为核心,对平衡池中的候选解采用莱维飞行方式进行搜索,生成局部种群,计算局部种群中粒子的适应度值,用更高适应度值的粒子代替原平衡池中的粒子;2)种群中粒子数量采取非线性递减策略,在迭代过程中,淘汰适应度值低的粒子,减少算法的运算量;3)将该新型平衡优化算法应用于多无人机网络覆盖问题,定义一组无人机在二维平面内的位置坐标编码为一个粒子。通过仿真实验表明,本发明提出的多无人机网络覆盖优化方法较好地平衡了全局搜索性能与局部

一种分布式多无人机中继网络覆盖的方法.pdf
本发明提出了一种分布式多无人机中继网络覆盖的方法,其步骤为:首先,建立多无人机通讯信道模型、能耗模型以及协同轨迹优化数学模型,并转换为马尔科夫博弈模型;其次,搭建集中训练分布式执行的多智能体深度强化学习算法,为每个无人机配备一个行动器和一个评价器,行动器根据无人机状态信息输出飞行轨迹,评价器输出对应的行动价值以训练行动器;最后,构建了双数据流结构的行动器,以提高无人机的动态性;构建了分层多头注意力编码器,利用注意力机制,使无人机能够抑制冗余信息,增加相关协作无人机的关系权重,从而建立正确复杂的协作关系。本
一种多无人机多播系统的联合轨迹及波束优化方法.pdf
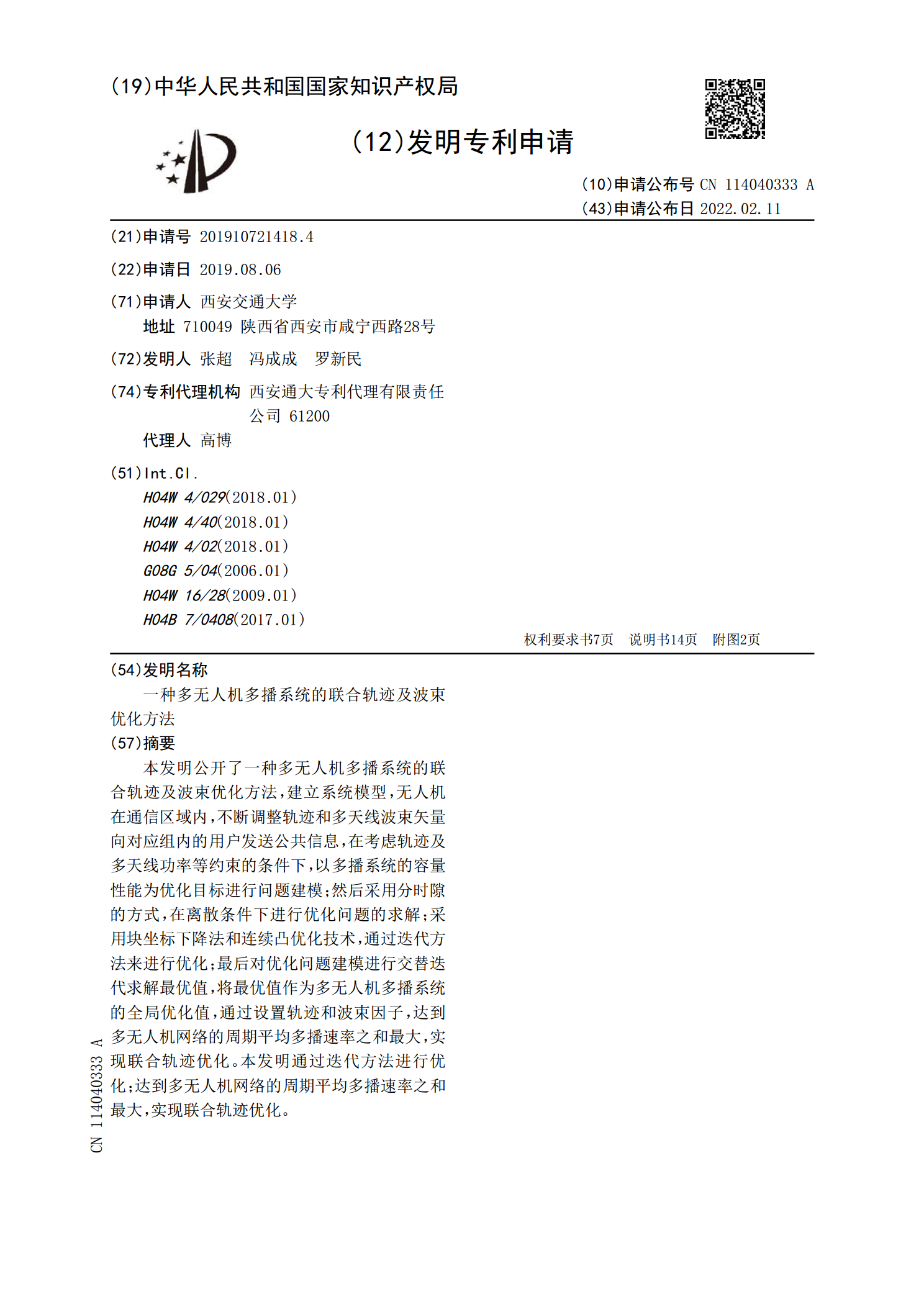
本发明公开了一种多无人机多播系统的联合轨迹及波束优化方法,建立系统模型,无人机在通信区域内,不断调整轨迹和多天线波束矢量向对应组内的用户发送公共信息,在考虑轨迹及多天线功率等约束的条件下,以多播系统的容量性能为优化目标进行问题建模;然后采用分时隙的方式,在离散条件下进行优化问题的求解;采用块坐标下降法和连续凸优化技术,通过迭代方法来进行优化;最后对优化问题建模进行交替迭代求解最优值,将最优值作为多无人机多播系统的全局优化值,通过设置轨迹和波束因子,达到多无人机网络的周期平均多播速率之和最大,实现联合轨迹优
一种多无人机的控制切换方法.pdf
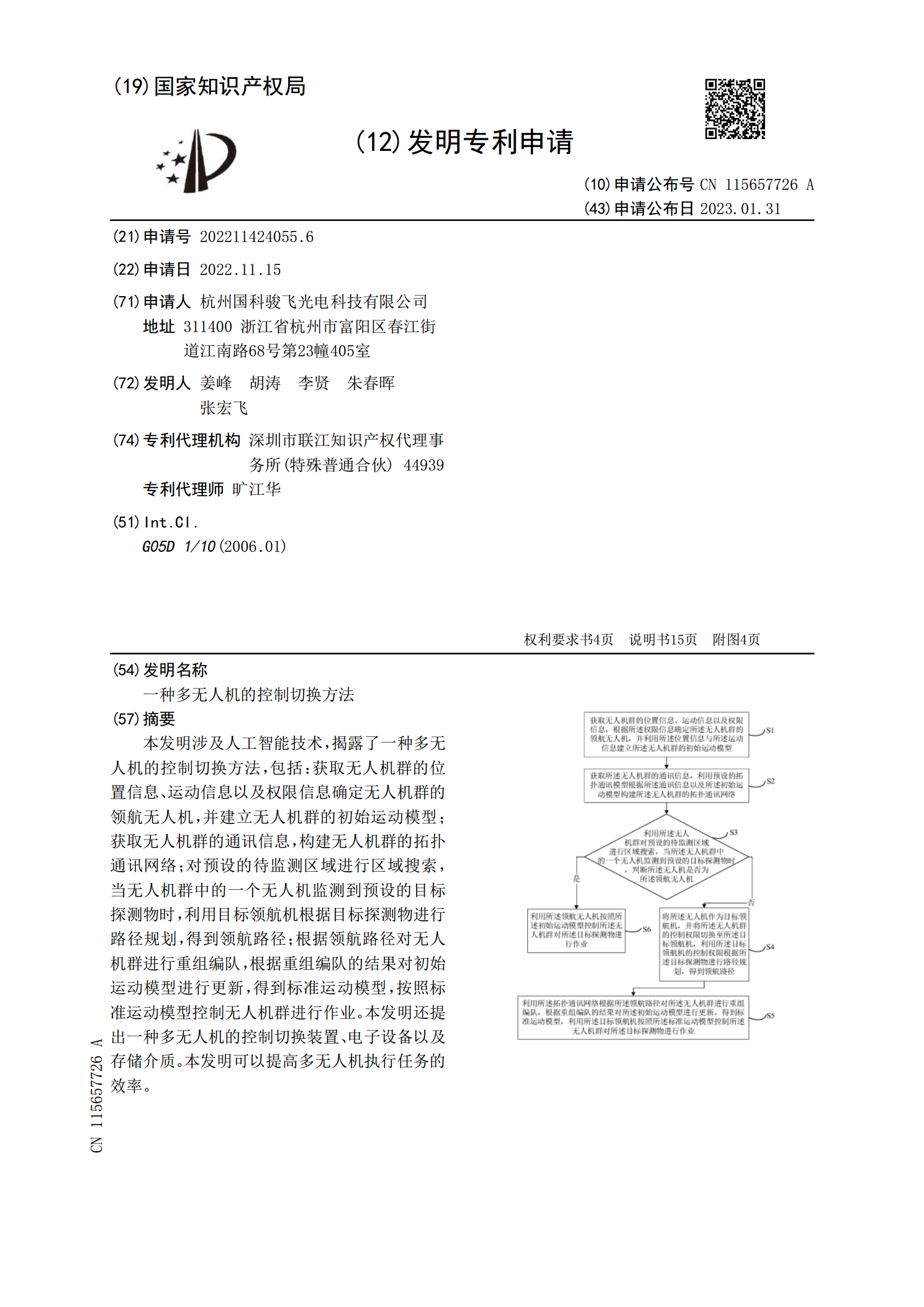
本发明涉及人工智能技术,揭露了一种多无人机的控制切换方法,包括:获取无人机群的位置信息、运动信息以及权限信息确定无人机群的领航无人机,并建立无人机群的初始运动模型;获取无人机群的通讯信息,构建无人机群的拓扑通讯网络;对预设的待监测区域进行区域搜索,当无人机群中的一个无人机监测到预设的目标探测物时,利用目标领航机根据目标探测物进行路径规划,得到领航路径;根据领航路径对无人机群进行重组编队,根据重组编队的结果对初始运动模型进行更新,得到标准运动模型,按照标准运动模型控制无人机群进行作业。本发明还提出一种多无人
多无人机协同的干扰资源优化分配方法.pdf
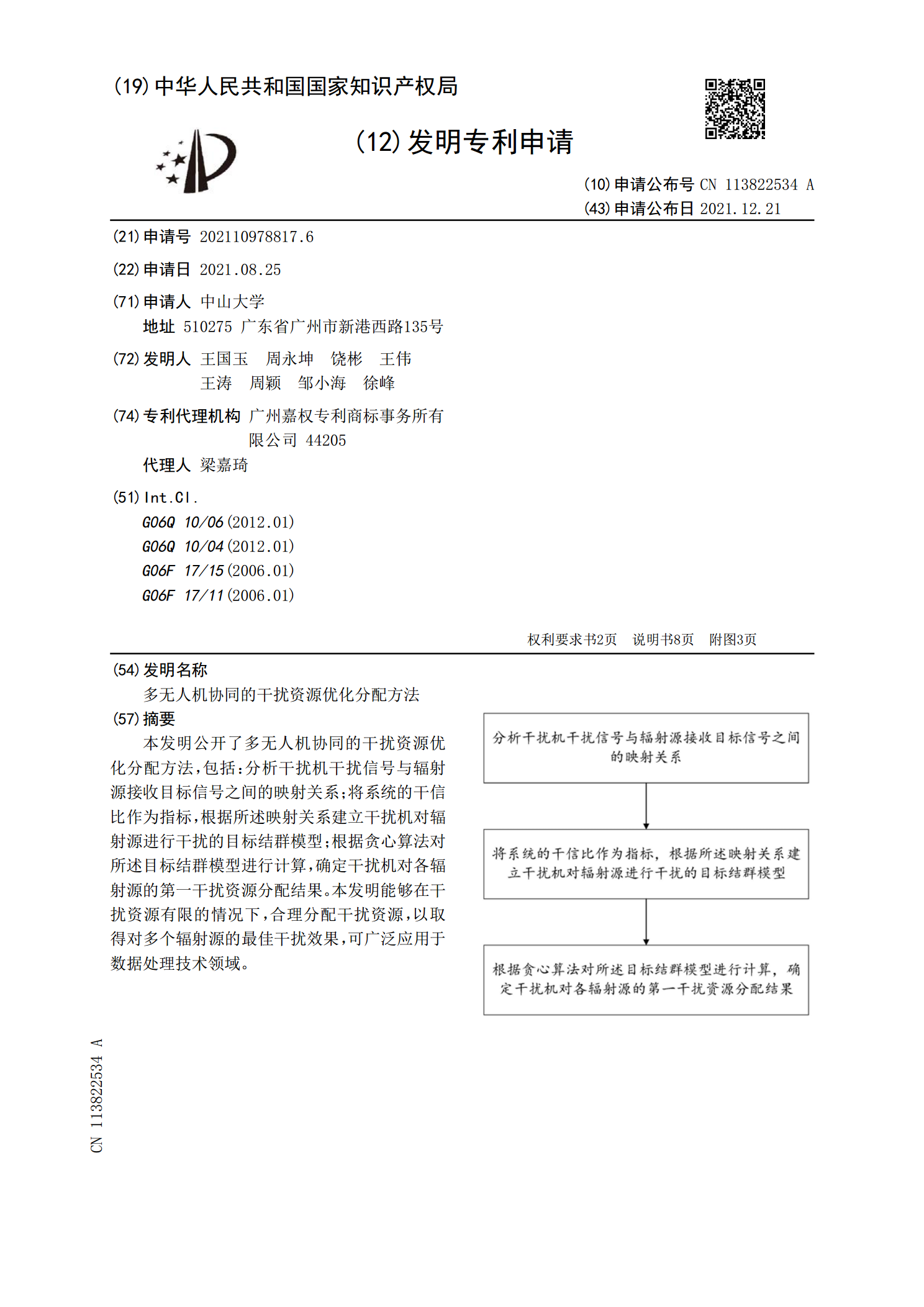
本发明公开了多无人机协同的干扰资源优化分配方法,包括:分析干扰机干扰信号与辐射源接收目标信号之间的映射关系;将系统的干信比作为指标,根据所述映射关系建立干扰机对辐射源进行干扰的目标结群模型;根据贪心算法对所述目标结群模型进行计算,确定干扰机对各辐射源的第一干扰资源分配结果。本发明能够在干扰资源有限的情况下,合理分配干扰资源,以取得对多个辐射源的最佳干扰效果,可广泛应用于数据处理技术领域。