
高精度自动对位贴附方法及高精度自动对位贴附机.pdf

是你****盟主


1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

高精度自动对位贴附方法及高精度自动对位贴附机.pdf
一种高精度自动对位贴附方法及高精度自动对位贴附机,其中,所述贴附机包括三轴对位机构和CCD对位机构,所述三轴对位机构与CCD对位机构相互配合将被粘接对象与液晶玻璃衬底的相应部位准确对位,还包括转动平台,所述转动平台包括伺服电机、压着机构支撑架和目标平台支撑架,所述压着机构支撑架和目标平台支撑架同轴上下设置,并由所述伺服电机驱动;在所述压着机构支撑架上设有至少三个压着机构,所述压着机构均匀分布在压着机构支撑架圆周上,在所述目标平台支撑架设置有与所述压着机构数量相等,其位置与所述压着机构上下对应的目标平台。本

液晶面板胶带的对位贴附机.pdf
本发明揭示了一种液晶面板胶带的对位贴附机,包括具真空吸孔的作业平台、相对作业平台固定的悬架及胶贴装置,其特征在于胶贴装置包括:设于作业平台表面的定位调节机构,相对矩形的背光板框相邻两边设有定位板,而另一侧短边处设有调整板;设于定位板及调整板外周的右侧胶贴单元及通过齿轮组相互齿接联动的前侧胶贴单元与左侧胶贴单元,其中左侧和右侧的胶贴单元分别设有作业手柄;并且悬架上设有正对面板的至少两个CCD对位机构;本发明通过真空吸附平台定位面板及背光板框,可以对三边同时进行贴附作业,能有效降低作业人员的劳动强度,提高了作
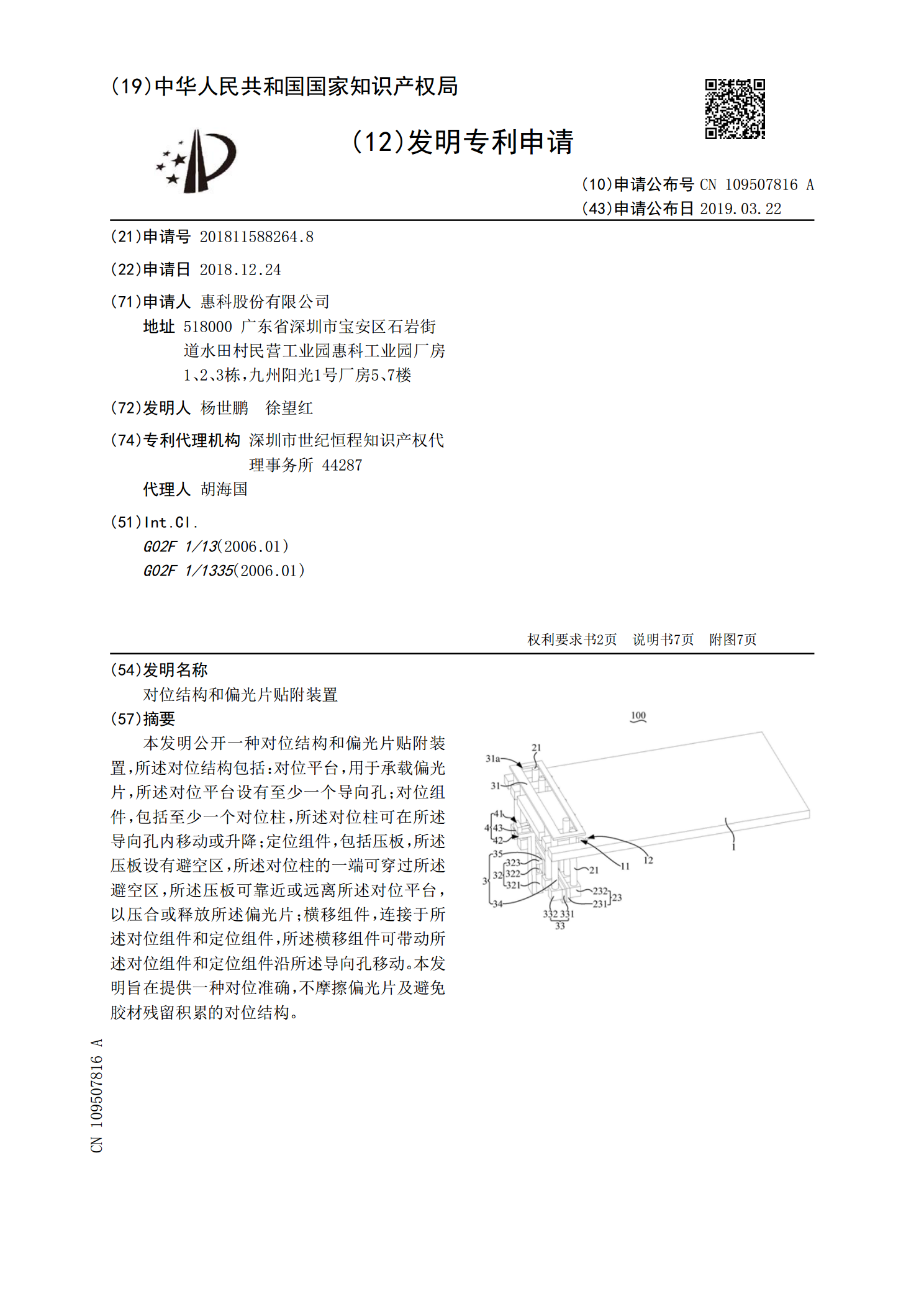
对位结构和偏光片贴附装置.pdf
本发明公开一种对位结构和偏光片贴附装置,所述对位结构包括:对位平台,用于承载偏光片,所述对位平台设有至少一个导向孔;对位组件,包括至少一个对位柱,所述对位柱可在所述导向孔内移动或升降;定位组件,包括压板,所述压板设有避空区,所述对位柱的一端可穿过所述避空区,所述压板可靠近或远离所述对位平台,以压合或释放所述偏光片;横移组件,连接于所述对位组件和定位组件,所述横移组件可带动所述对位组件和定位组件沿所述导向孔移动。本发明旨在提供一种对位准确,不摩擦偏光片及避免胶材残留积累的对位结构。
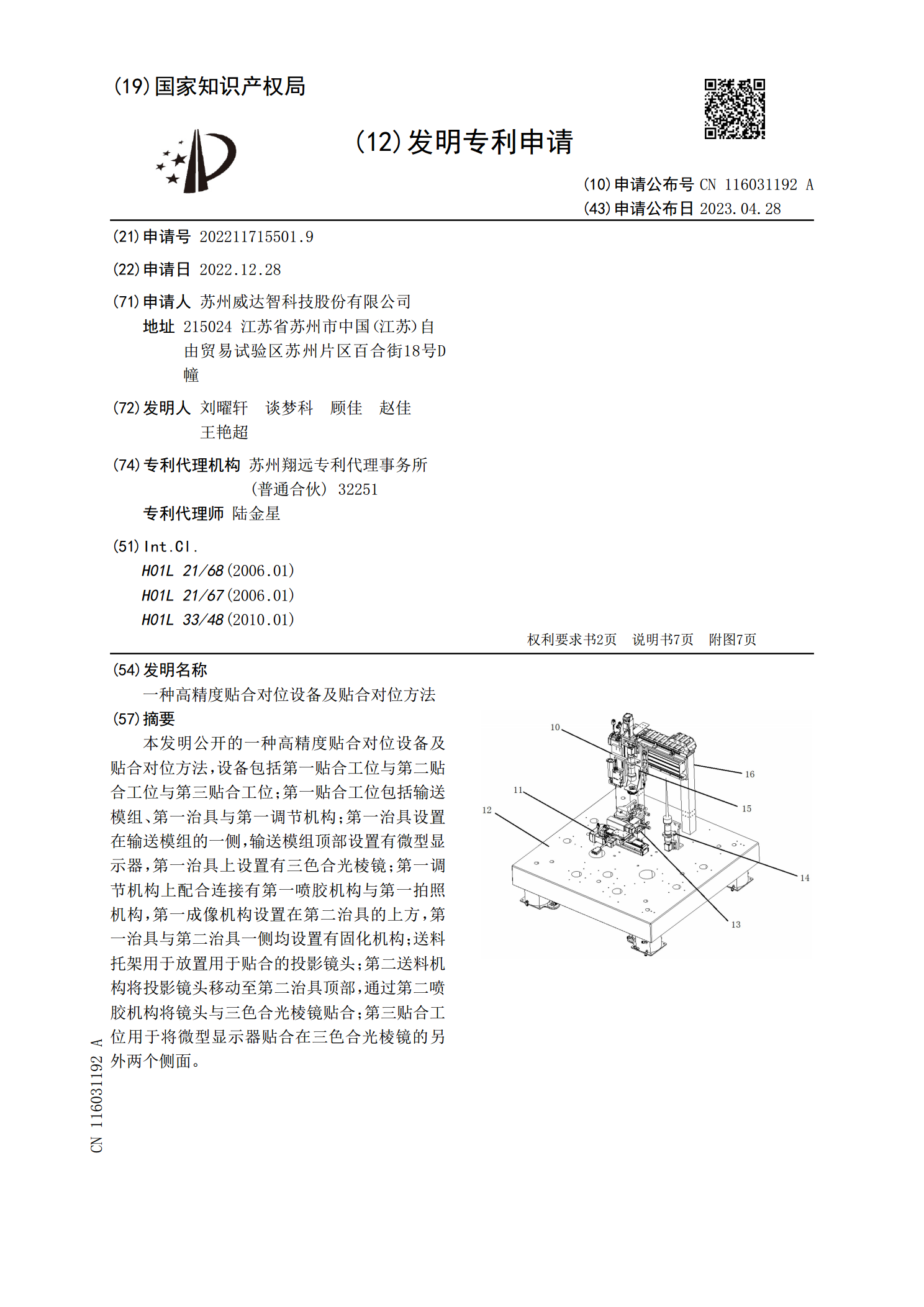
一种高精度贴合对位设备及贴合对位方法.pdf
本发明公开的一种高精度贴合对位设备及贴合对位方法,设备包括第一贴合工位与第二贴合工位与第三贴合工位;第一贴合工位包括输送模组、第一治具与第一调节机构;第一治具设置在输送模组的一侧,输送模组顶部设置有微型显示器,第一治具上设置有三色合光棱镜;第一调节机构上配合连接有第一喷胶机构与第一拍照机构,第一成像机构设置在第二治具的上方,第一治具与第二治具一侧均设置有固化机构;送料托架用于放置用于贴合的投影镜头;第二送料机构将投影镜头移动至第二治具顶部,通过第二喷胶机构将镜头与三色合光棱镜贴合;第三贴合工位用于将微型显
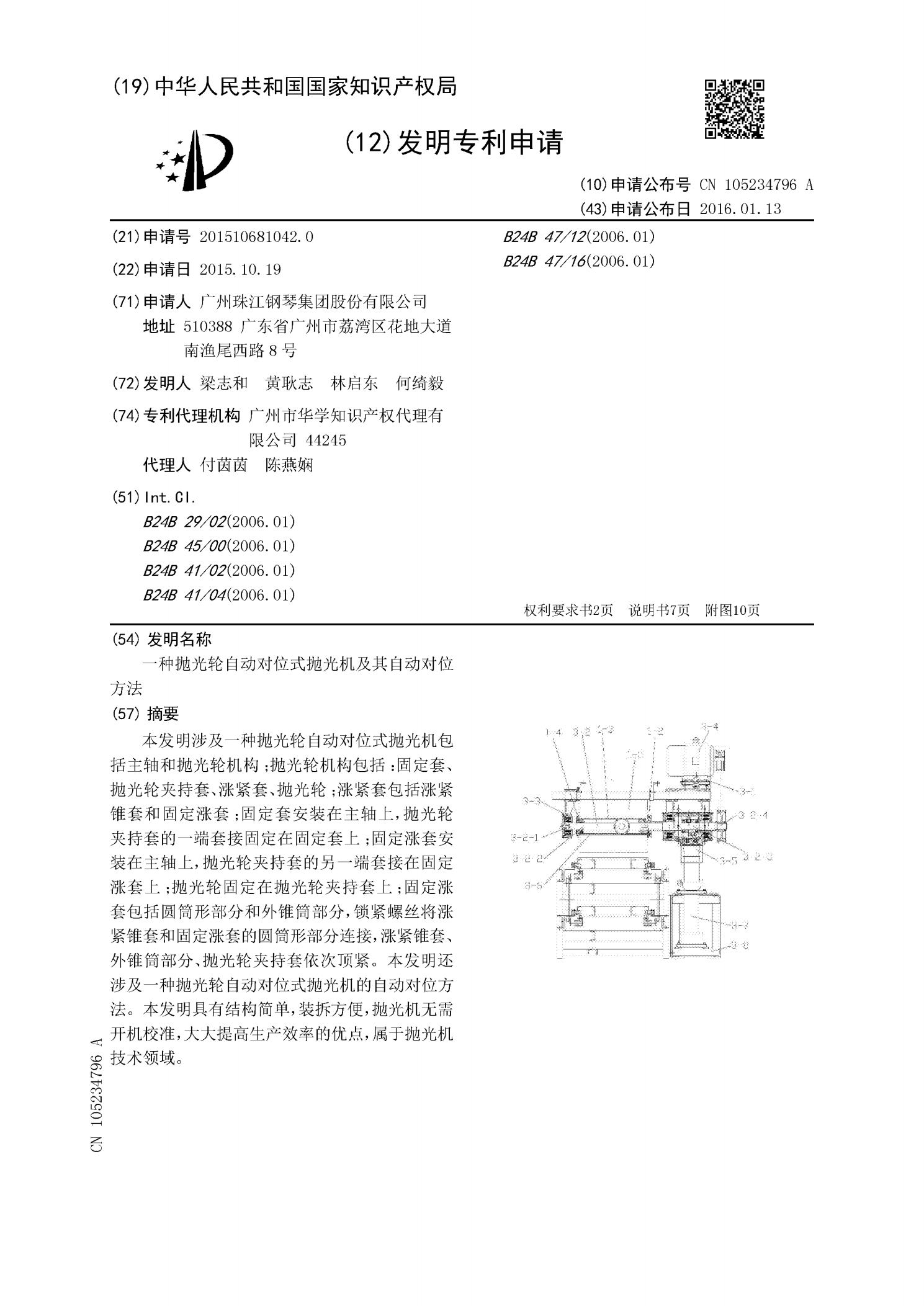
一种抛光轮自动对位式抛光机及其自动对位方法.pdf
本发明涉及一种抛光轮自动对位式抛光机包括主轴和抛光轮机构;抛光轮机构包括:固定套、抛光轮夹持套、涨紧套、抛光轮;涨紧套包括涨紧锥套和固定涨套;固定套安装在主轴上,抛光轮夹持套的一端套接固定在固定套上;固定涨套安装在主轴上,抛光轮夹持套的另一端套接在固定涨套上;抛光轮固定在抛光轮夹持套上;固定涨套包括圆筒形部分和外锥筒部分,锁紧螺丝将涨紧锥套和固定涨套的圆筒形部分连接,涨紧锥套、外锥筒部分、抛光轮夹持套依次顶紧。本发明还涉及一种抛光轮自动对位式抛光机的自动对位方法。本发明具有结构简单,装拆方便,抛光机无需开