
一种基于智能终端的低功耗行走装置及控制方法.pdf

梅雪****67


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于智能终端的低功耗行走装置及控制方法.pdf
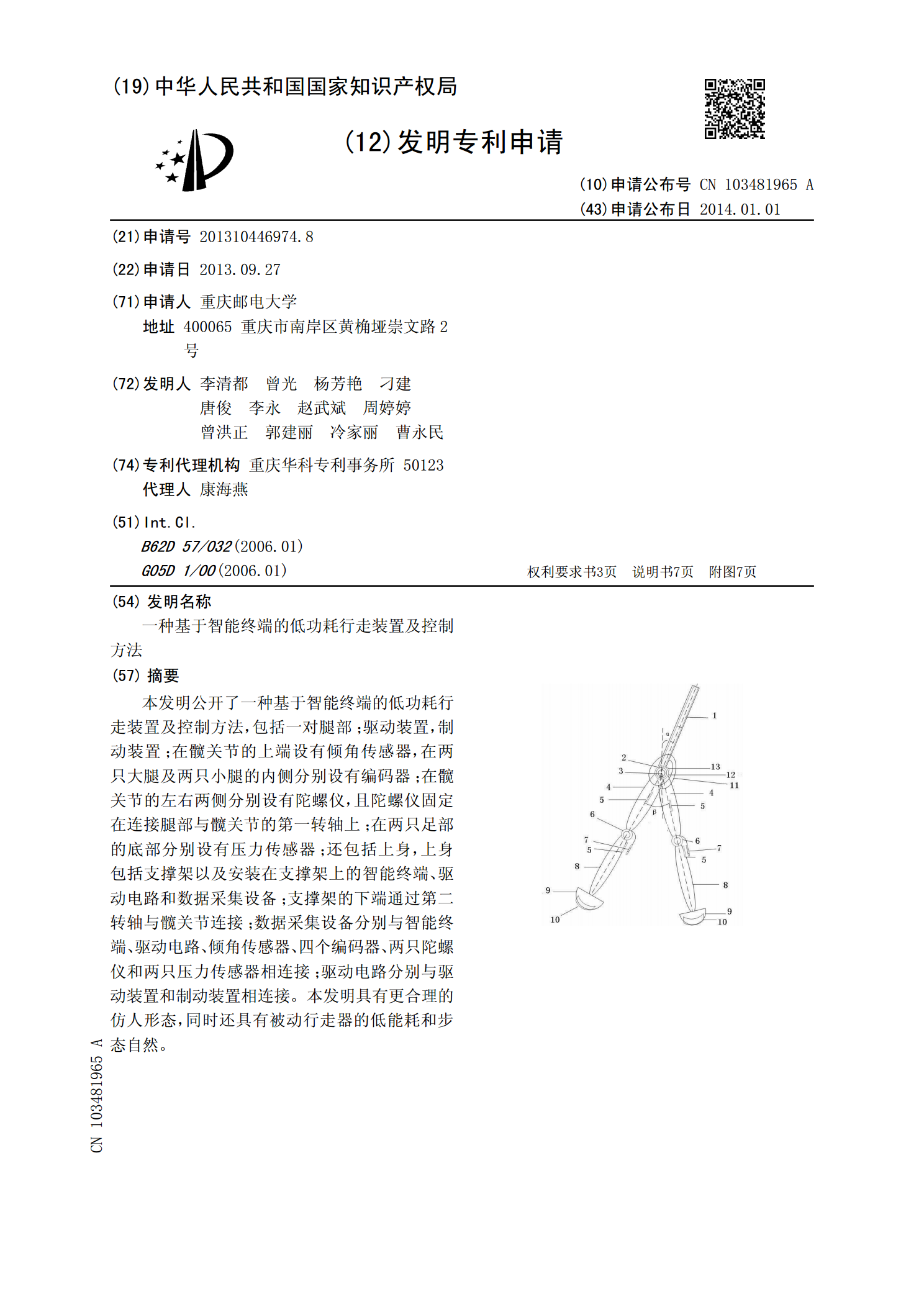
本发明公开了一种基于智能终端的低功耗行走装置及控制方法,包括一对腿部;驱动装置,制动装置;在髋关节的上端设有倾角传感器,在两只大腿及两只小腿的内侧分别设有编码器;在髋关节的左右两侧分别设有陀螺仪,且陀螺仪固定在连接腿部与髋关节的第一转轴上;在两只足部的底部分别设有压力传感器;还包括上身,上身包括支撑架以及安装在支撑架上的智能终端、驱动电路和数据采集设备;支撑架的下端通过第二转轴与髋关节连接;数据采集设备分别与智能终端、驱动电路、倾角传感器、四个编码器、两只陀螺仪和两只压力传感器相连接;驱动电路分别与驱动装
一种智能终端的控制方法、装置及智能终端.pdf
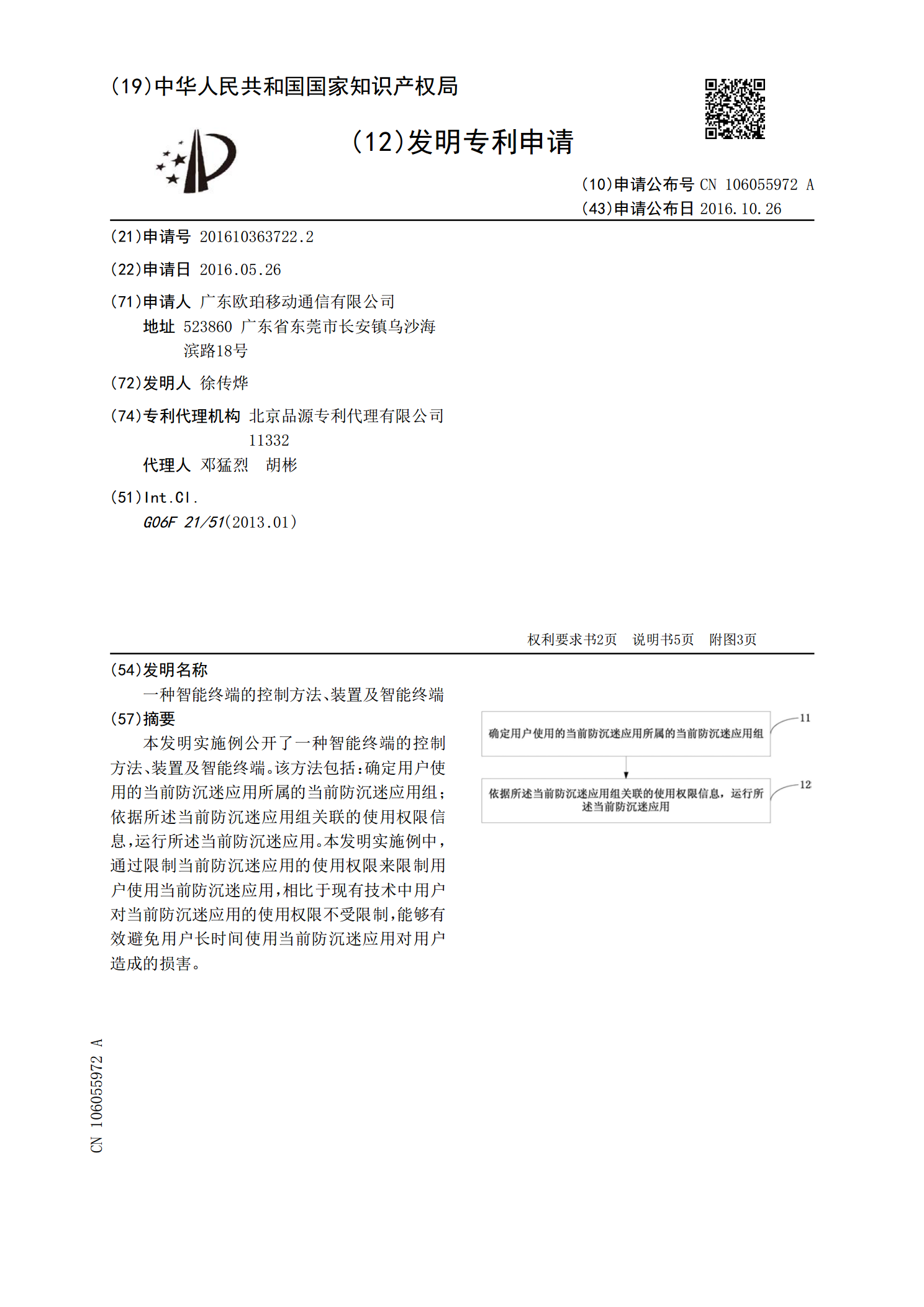
本发明实施例公开了一种智能终端的控制方法、装置及智能终端。该方法包括:确定用户使用的当前防沉迷应用所属的当前防沉迷应用组;依据所述当前防沉迷应用组关联的使用权限信息,运行所述当前防沉迷应用。本发明实施例中,通过限制当前防沉迷应用的使用权限来限制用户使用当前防沉迷应用,相比于现有技术中用户对当前防沉迷应用的使用权限不受限制,能够有效避免用户长时间使用当前防沉迷应用对用户造成的损害。
一种智能终端的控制方法、装置及智能终端.pdf
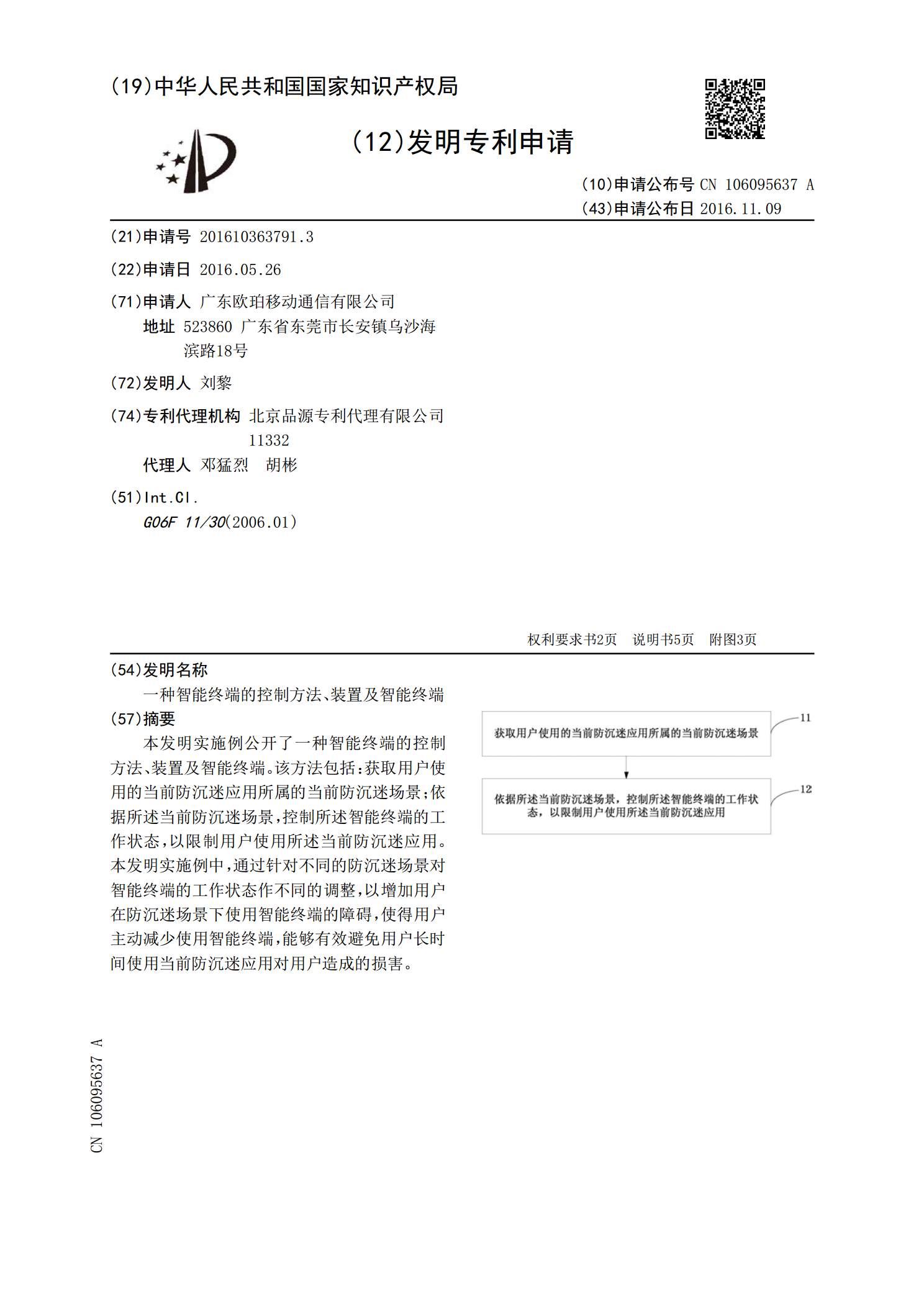
本发明实施例公开了一种智能终端的控制方法、装置及智能终端。该方法包括:获取用户使用的当前防沉迷应用所属的当前防沉迷场景;依据所述当前防沉迷场景,控制所述智能终端的工作状态,以限制用户使用所述当前防沉迷应用。本发明实施例中,通过针对不同的防沉迷场景对智能终端的工作状态作不同的调整,以增加用户在防沉迷场景下使用智能终端的障碍,使得用户主动减少使用智能终端,能够有效避免用户长时间使用当前防沉迷应用对用户造成的损害。

一种基于智能监拍装置的低功耗机芯控制方法.pdf
一种基于智能监拍装置的低功耗机芯控制方法,包括以下步骤:a、机芯操作指令下发;b、进入机芯准备流程;c、机芯操作方法调用;d、开启机芯下电闹钟;e、闹钟响起,机芯下电。本发明提出一种机芯上下电控制策略,机芯正常处于下电状态,有操作指令下发时才会给机芯上电,且逻辑保证其在完成工作后的尽量短时间内下电,通过减少机芯上电时间来降低整机功耗,以增加整机待机时长,增强该高配置监拍装置的普遍适用性,使其更易于推广应用。

一种智能终端的控制方法和装置、以及智能终端.pdf
本发明实施例公开了一种智能终端的控制方法和装置、以及智能终端,属于智能终端技术领域。该控制方法包括:获取目标物品的图像信息;查询与该目标物品图像信息匹配的预存图像信息,并控制执行与预存图像信息对应的控制指令。本发明中,将至少一个物品作为智能终端的至少一个控制指令的触发标识,以使智能终端通过获取物品图像信息实现控制指令的触发操作,与现有技术相比,本发明中控制指令的触发标识多样化,比如不仅能通过指纹解锁智能终端还能够通过物品解锁智能终端,解决了现有智能终端解锁标识单一的问题,此外智能终端还可通过不同的物品触发