
一种下肢康复机器人足底多维传感装置.pdf

St****36

1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种下肢康复机器人足底多维传感装置.pdf
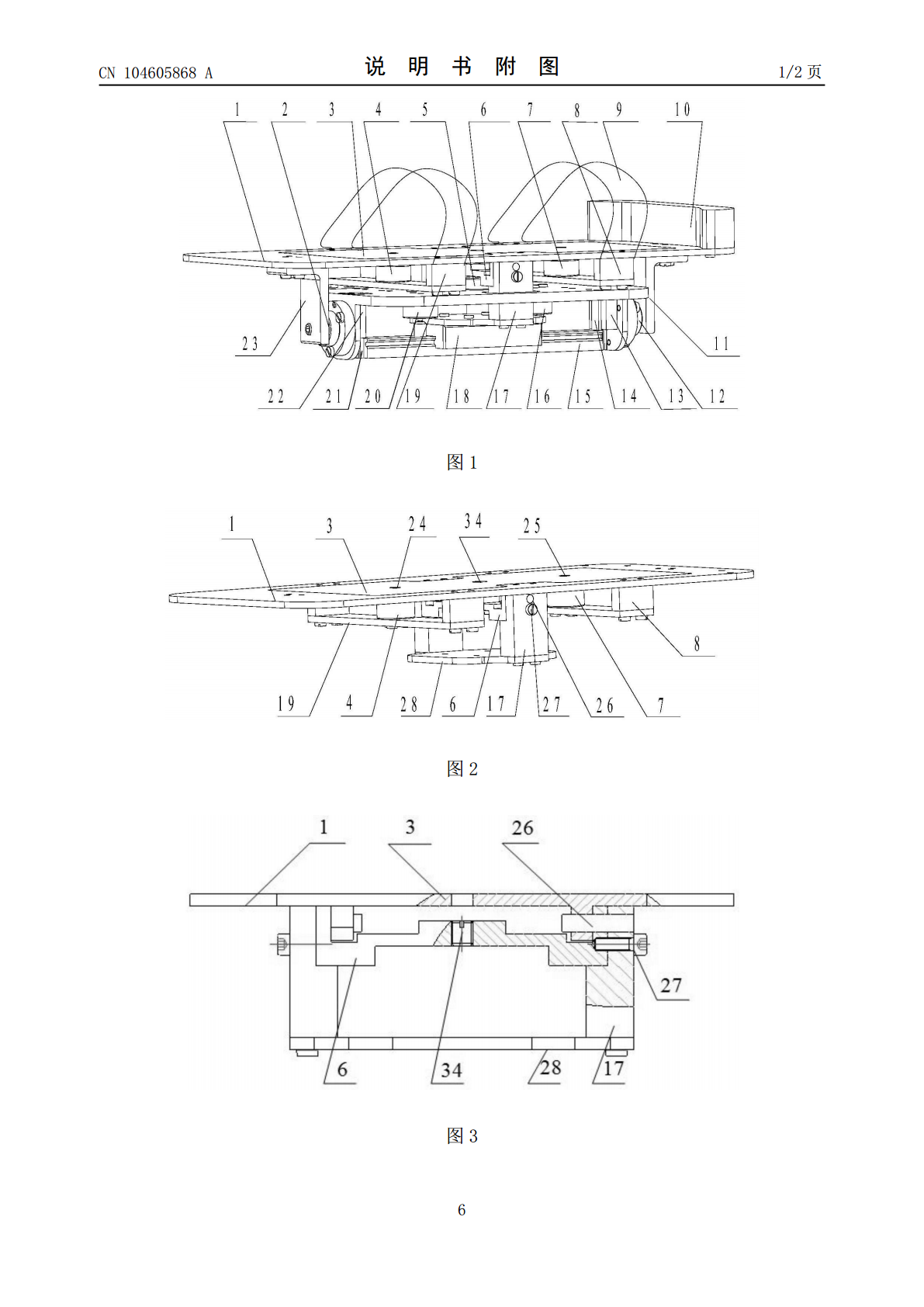
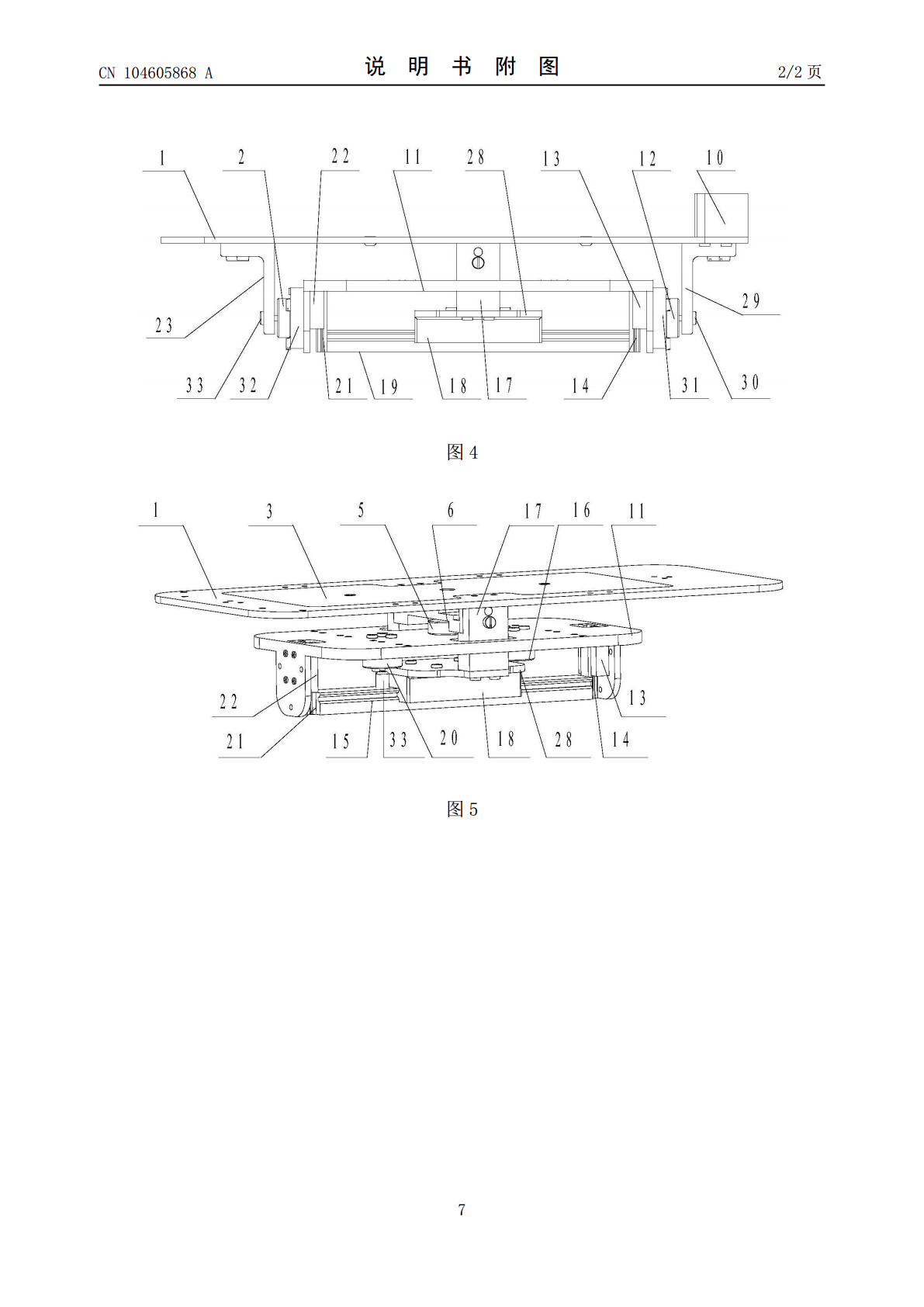
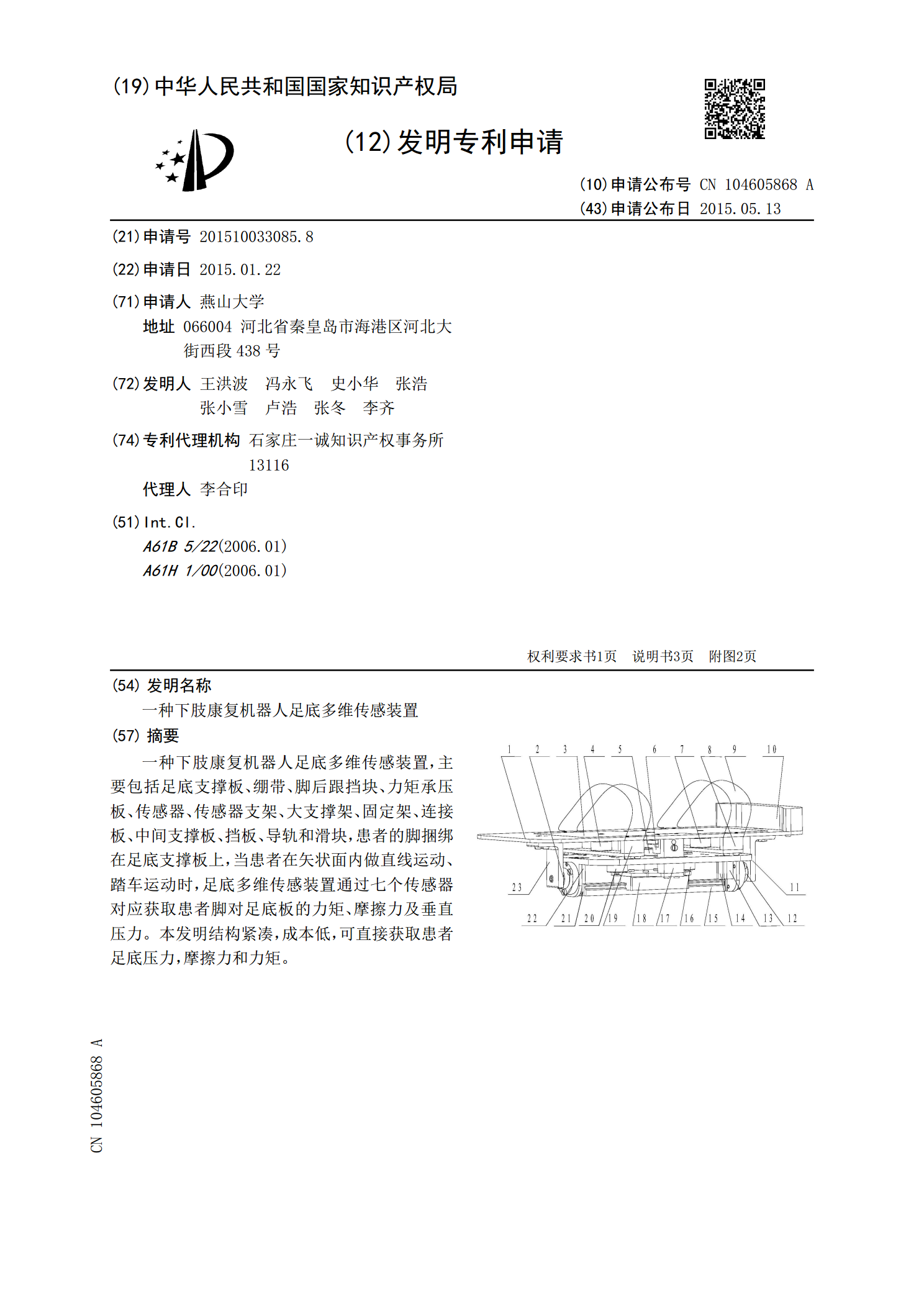
一种下肢康复机器人足底多维传感装置,主要包括足底支撑板、绷带、脚后跟挡块、力矩承压板、传感器、传感器支架、大支撑架、固定架、连接板、中间支撑板、挡板、导轨和滑块,患者的脚捆绑在足底支撑板上,当患者在矢状面内做直线运动、踏车运动时,足底多维传感装置通过七个传感器对应获取患者脚对足底板的力矩、摩擦力及垂直压力。本发明结构紧凑,成本低,可直接获取患者足底压力,摩擦力和力矩。

下肢康复机器人足底力分布测量装置的研究.docx
下肢康复机器人足底力分布测量装置的研究标题:下肢康复机器人足底力分布测量装置的研究摘要:下肢机器人康复是一种有效的康复治疗方式,可以帮助患者恢复步态和受损肌肉功能。然而,康复机器人的运动控制和反馈信息对于恢复过程的监测与评估至关重要。本研究旨在设计和开发一种用于测量康复机器人足底力分布的装置,以提供实时的足底力信息,从而更好地监测患者的康复过程。关键词:下肢康复,机器人,足底力分布,测量装置1.引言下肢康复机器人已成为康复治疗的重要手段,能够帮助患者恢复步态和受损肌肉功能。然而,当前康复机器人的普遍问题是

基于足底压力传感器的下肢综合康复评分.docx
基于足底压力传感器的下肢综合康复评分标题:基于足底压力传感器的下肢综合康复评分摘要:下肢综合康复评分是评估患者的下肢功能和康复效果的重要指标,对指导康复治疗和评价治疗效果具有重要意义。本文以足底压力传感器为工具,探讨其在下肢综合康复评分中的应用。首先介绍了足底压力传感器的原理和技术特点,然后探讨了其在下肢功能评估、步态分析和康复效果评价中的应用。最后对当前研究存在的问题和未来的研究方向进行了展望。关键词:足底压力传感器;下肢功能评估;步态分析;康复效果评价引言:下肢功能发生障碍是导致许多疾病和伤害的主要原

下肢康复机器人足底力分布检测系统的研究的开题报告.docx
下肢康复机器人足底力分布检测系统的研究的开题报告一、研究背景下肢残疾已成为世界范围内影响人类身体和心理健康的一大问题。近年来,随着科学技术的不断发展,下肢康复机器人得以广泛应用。下肢康复机器人可以帮助患者进行下肢康复训练,提高患者的生活自理能力和社会适应能力。但是,现有的下肢康复机器人在控制算法和力分布检测方面还存在着一些不足,需要进一步改进和完善。本次研究旨在开发一种下肢康复机器人足底力分布检测系统,通过检测患者在使用下肢康复机器人时足底的力分布情况,实现对患者下肢康复训练过程中的力量、平衡能力和协调性

下肢康复机器人足底力分布检测系统的研究的中期报告.docx
下肢康复机器人足底力分布检测系统的研究的中期报告本研究旨在开发一种针对下肢康复机器人的足底力分布检测系统,以提高机器人康复效果和患者的舒适度。经过初步研究和实验,目前已完成系统的初步设计和部件的选型,正在进行系统的搭建和功能的实现,以下是本研究的中期报告。一、研究背景下肢力量失调是导致身体运动和平衡功能障碍的主要原因之一,如髋部和膝盖疾病等导致的下肢肌肉力量衰退。随着现代医学技术的不断发展,下肢康复机器人已逐渐成为一种有效的治疗手段。然而,传统康复机器人无法针对患者不同的足底力分布进行有效调整,容易造成不