
应用于机器人的直驱电机.pdf

灵波****ng

1/9

2/9
3/9
4/9
5/9

6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
应用于机器人的直驱电机.pdf
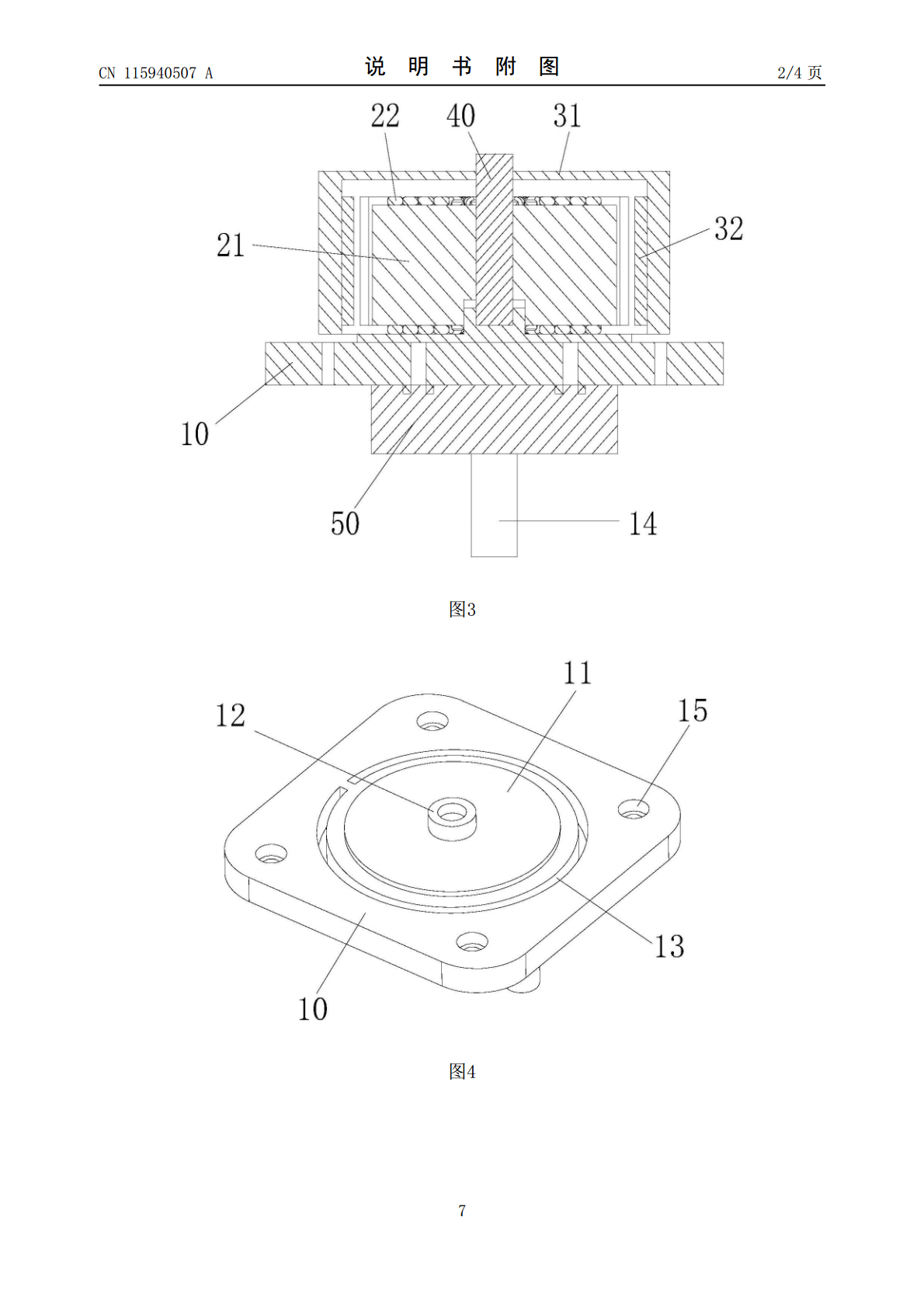
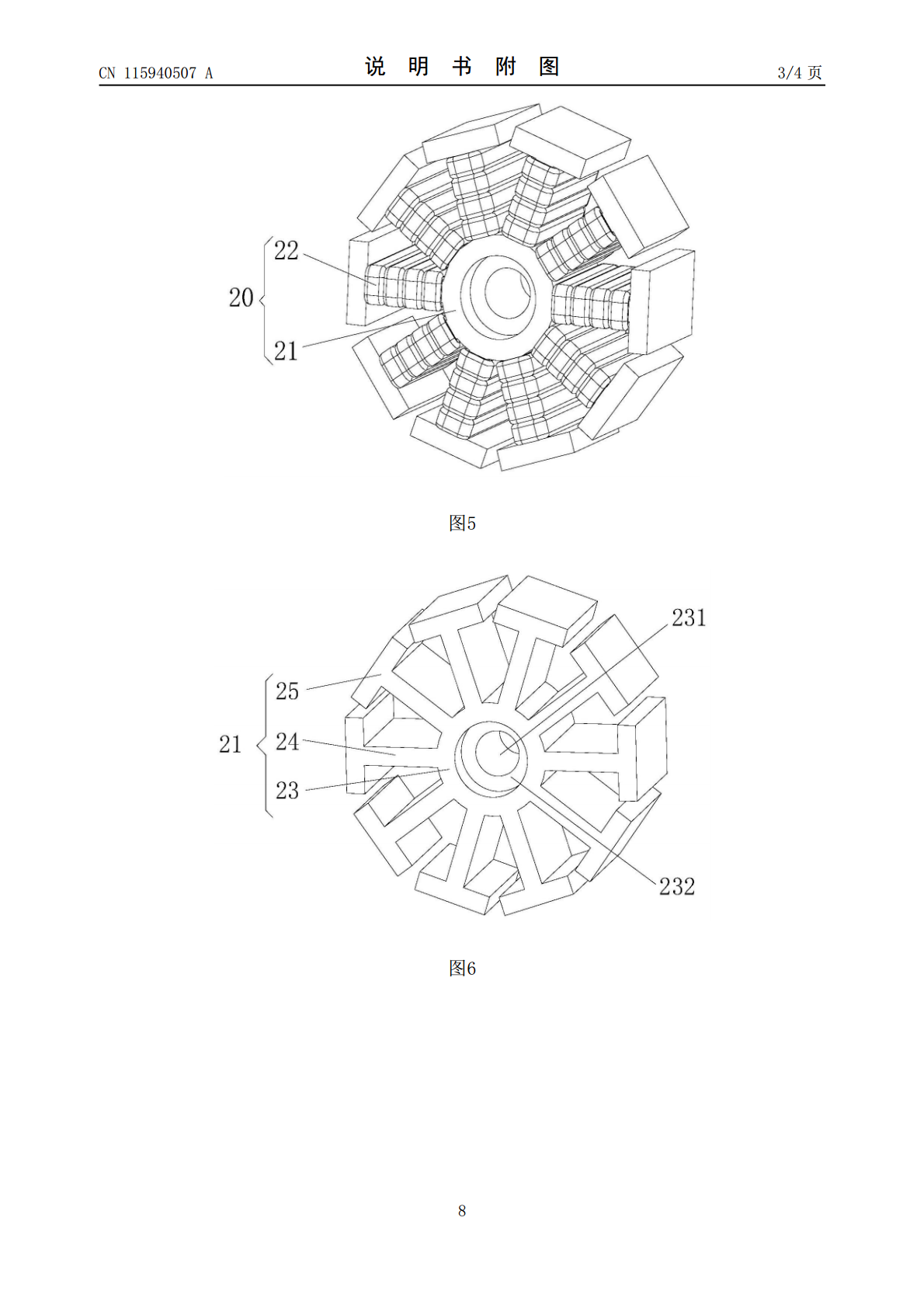
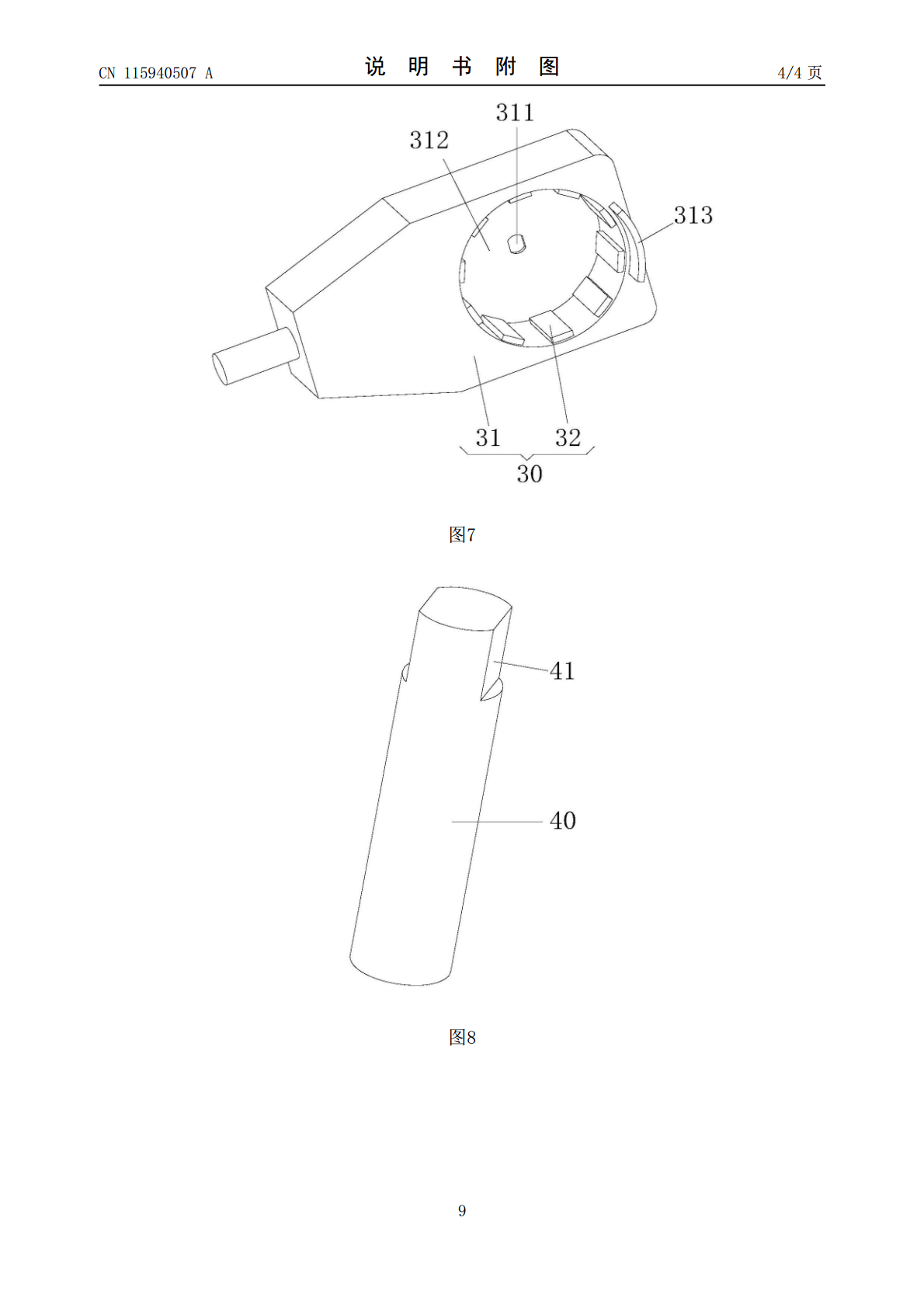
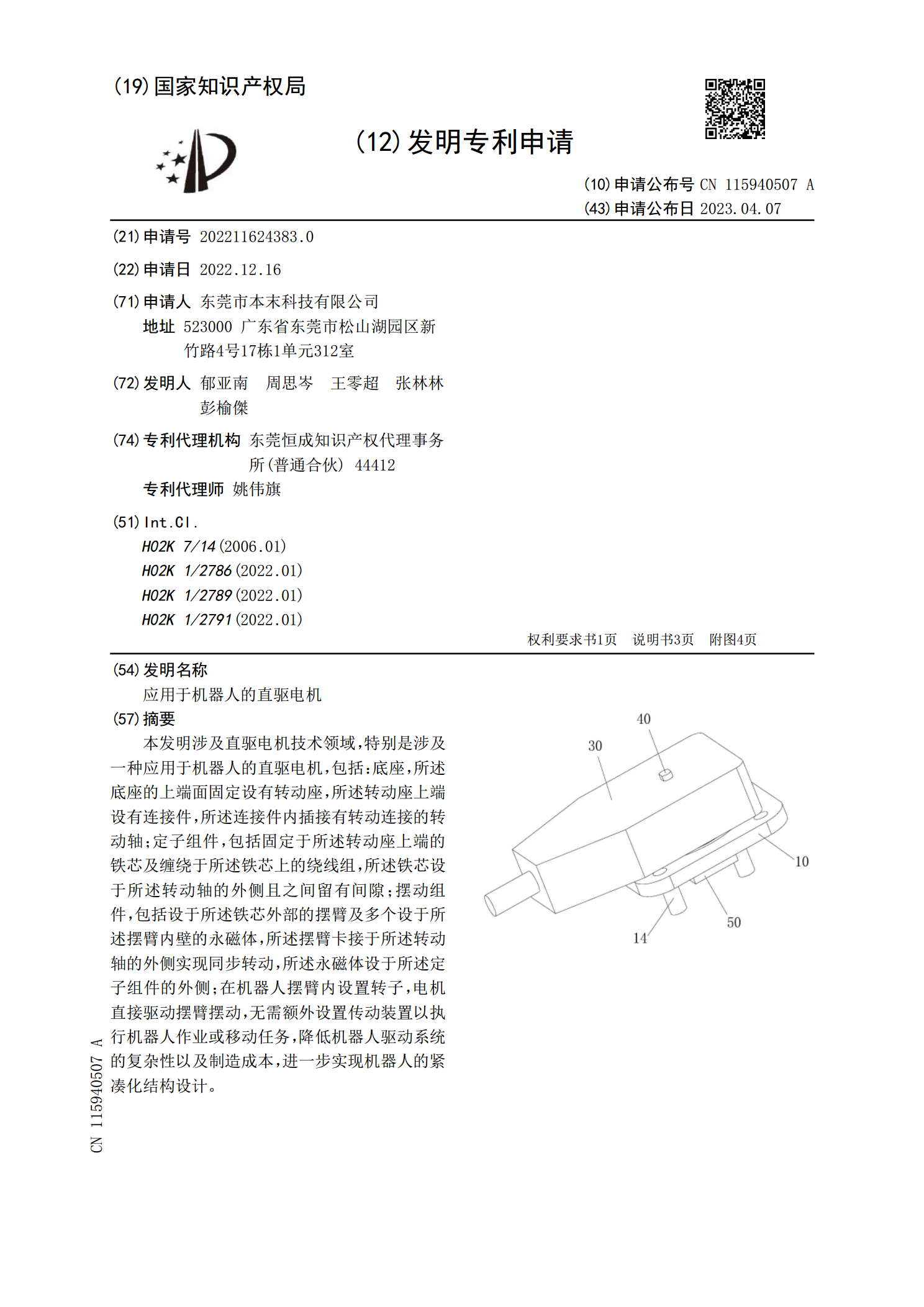
本发明涉及直驱电机技术领域,特别是涉及一种应用于机器人的直驱电机,包括:底座,所述底座的上端面固定设有转动座,所述转动座上端设有连接件,所述连接件内插接有转动连接的转动轴;定子组件,包括固定于所述转动座上端的铁芯及缠绕于所述铁芯上的绕线组,所述铁芯设于所述转动轴的外侧且之间留有间隙;摆动组件,包括设于所述铁芯外部的摆臂及多个设于所述摆臂内壁的永磁体,所述摆臂卡接于所述转动轴的外侧实现同步转动,所述永磁体设于所述定子组件的外侧;在机器人摆臂内设置转子,电机直接驱动摆臂摆动,无需额外设置传动装置以执行机器人作
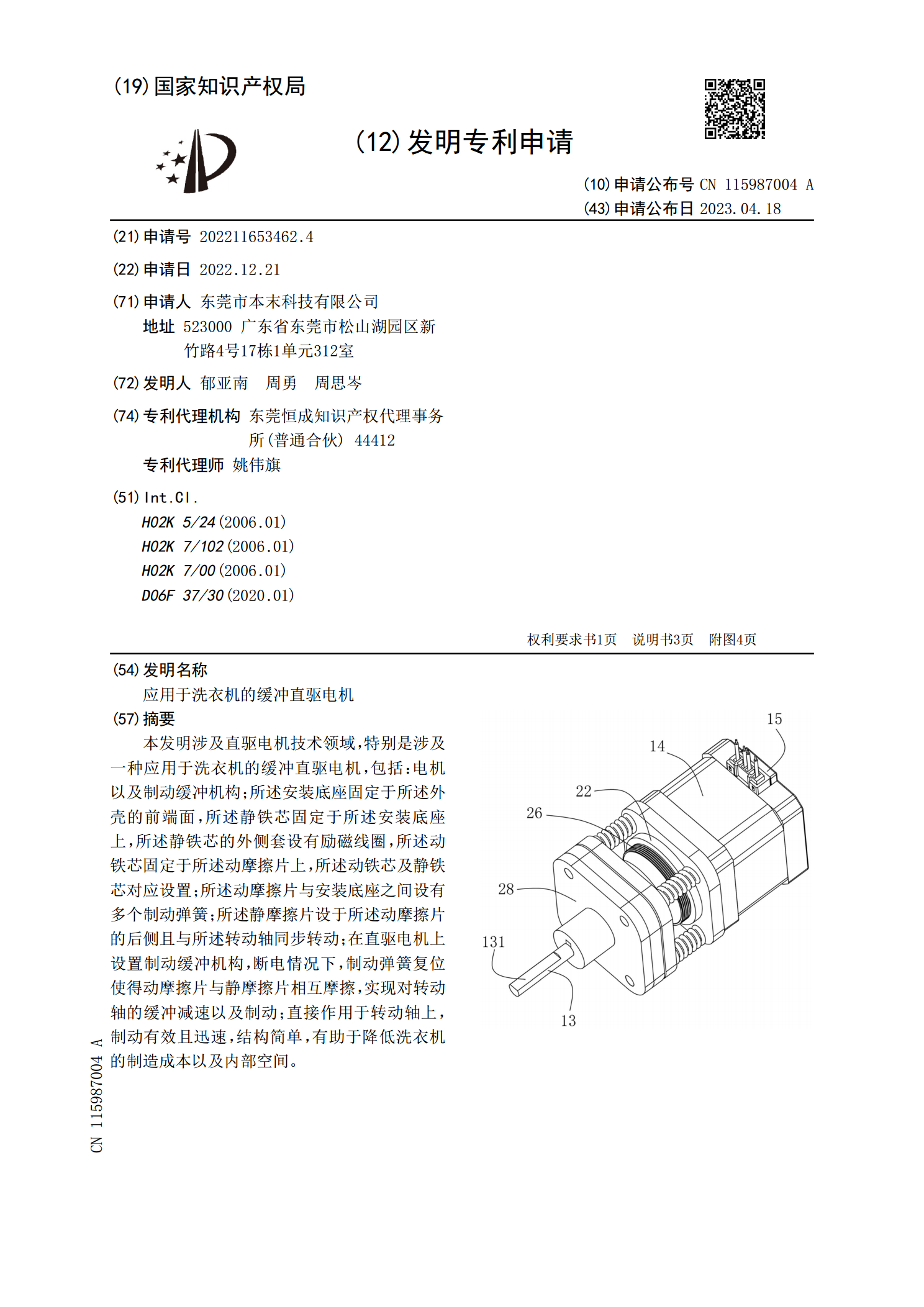
应用于洗衣机的缓冲直驱电机.pdf
本发明涉及直驱电机技术领域,特别是涉及一种应用于洗衣机的缓冲直驱电机,包括:电机以及制动缓冲机构;所述安装底座固定于所述外壳的前端面,所述静铁芯固定于所述安装底座上,所述静铁芯的外侧套设有励磁线圈,所述动铁芯固定于所述动摩擦片上,所述动铁芯及静铁芯对应设置;所述动摩擦片与安装底座之间设有多个制动弹簧;所述静摩擦片设于所述动摩擦片的后侧且与所述转动轴同步转动;在直驱电机上设置制动缓冲机构,断电情况下,制动弹簧复位使得动摩擦片与静摩擦片相互摩擦,实现对转动轴的缓冲减速以及制动;直接作用于转动轴上,制动有效且迅

直驱电机.pdf
本发明涉及一种直驱电机,并涉及大尺寸、高转矩、直驱、永磁型电机,例如用于发电的风力涡轮发电机、潮汐发电机和水力发电机以及通过外部电能旋转地驱动的电动机。具体地,本发明的目的在于提供一种直驱、永磁型电机,所述直驱、永磁型电机通过最优化的构造能够使用更少的材料,从而制造成本更低,并且所述直驱、永磁型电机易于制造、运输、安装、维护和修理。使用根据本发明的直驱电机,能够通过最大化转矩密度和最少化地使用有源材料而能够降低制造成本,并且通过使用用于支撑和引导旋转体(例如转子)的无轴承系统能够先转递减少使用无源材料,并

磁齿轮复合电机直驱式SCARA机器人研制.docx
磁齿轮复合电机直驱式SCARA机器人研制磁齿轮复合电机直驱式SCARA机器人研制摘要:随着工业自动化的不断发展,机器人技术在生产线上的应用越来越广泛。为了提高机器人的精准度和工作效率,研发直驱式SCARA机器人成为一个重要的方向。本论文以磁齿轮复合电机直驱式SCARA机器人的研制为课题,探讨了其优势和关键技术。1.引言直驱式SCARA机器人是一种具有高精度的工业机器人,用于在生产线上执行精确而重复的操作。传统的SCARA机器人使用传动器件传递动力,如减速器和传动带,但这些传动器件会造成能量损失和机械零件的
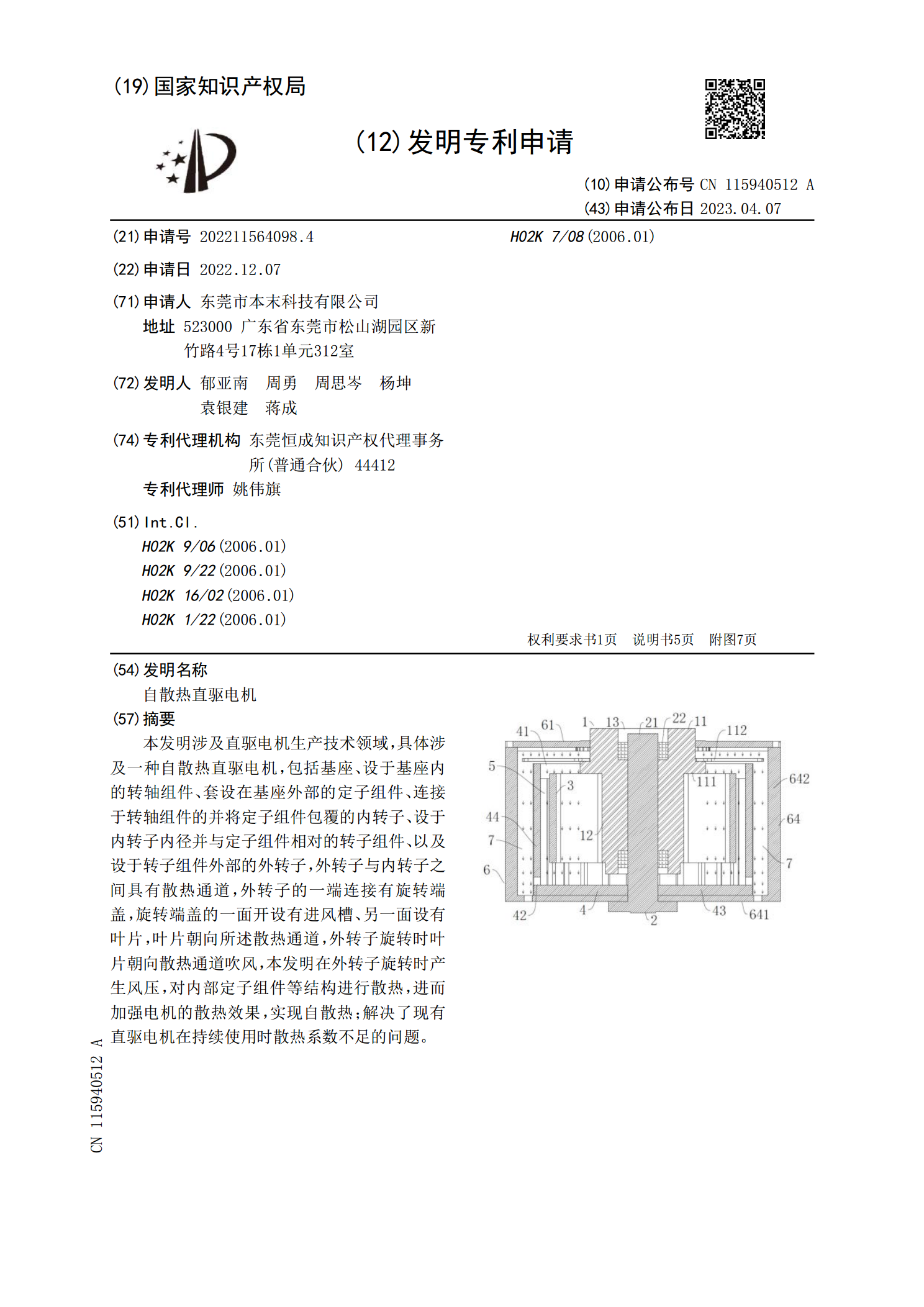
自散热直驱电机.pdf
本发明涉及直驱电机生产技术领域,具体涉及一种自散热直驱电机,包括基座、设于基座内的转轴组件、套设在基座外部的定子组件、连接于转轴组件的并将定子组件包覆的内转子、设于内转子内径并与定子组件相对的转子组件、以及设于转子组件外部的外转子,外转子与内转子之间具有散热通道,外转子的一端连接有旋转端盖,旋转端盖的一面开设有进风槽、另一面设有叶片,叶片朝向所述散热通道,外转子旋转时叶片朝向散热通道吹风,本发明在外转子旋转时产生风压,对内部定子组件等结构进行散热,进而加强电机的散热效果,实现自散热;解决了现有直驱电机在持