
一种墙面抹平机器人.pdf

fa****楠吖

1/5
2/5
3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种墙面抹平机器人.pdf
本发明涉及建筑设备领域,公开了一种墙面抹平机器人,包括:竖向轨道1、横梁2、抹平头3,行走小车6,所述行走小车6上分别设有支撑架和可水平滑动的电动机构,所述抹平头3通过升降机构安装在所述行走小车6上,所述抹平头3沿竖直方向滑动安装在所述竖向轨道1上,所述行走小车3上还设有用于带动所述抹平头3沿所述竖向轨道1上下移动的电机5及丝杆4。本发明能够自动抹平墙面,操作方便,墙面密实度均匀,平整度好,降低人力成本。

墙面抹平机器人设计及仿真的综述报告.docx
墙面抹平机器人设计及仿真的综述报告墙面抹平机器人是一款在施工行业中受到广泛关注的自动化设备。传统的墙面抹平需要人工完成,时间长、费用高、效果难以保证。而墙面抹平机器人的出现,可以有效节省时间、降低费用,并且可以实现更加精细化的施工。本文将就墙面抹平机器人的设计和仿真进行综述。设计首先,墙面抹平机器人的设计需要考虑到以下几个关键问题:机器人移动控制、喷涂设备控制、避障、零点复位等。其中,机器人移动控制是最为关键的一环,它的质量和稳定性直接影响到机器人的抹平效果。因此需要采用准确、稳定的导航控制方式,如GPS

一种简易混凝土墙面抹平机.pdf
本发明公开了一种简易混凝土墙面抹平机,包括,横向轨道;纵向轨道,其能够在横向轨道内左右滑动;移动架,其包括架体以及若干个第一滑动轮,若干个第一滑动轮分别安装于架体的两侧,第一滑动轮能够在纵向轨道内往复升降;抹平装置,其包括抹平板以及推动机构,推动机构安装于架体上,抹平板安装于推动机构的前端,推动机构能够驱动抹平板前后移动;以及提升装置,其安装于纵向轨道的上端,该提升装置能够驱动移动架在纵向轨道内往复升降。本发明的提升装置能够驱动抹平装置在墙面上往复的升降,从而能够对墙面进行抹平作业,减轻人员的劳动强度;抹
智能装饰墙面抹平机.pdf
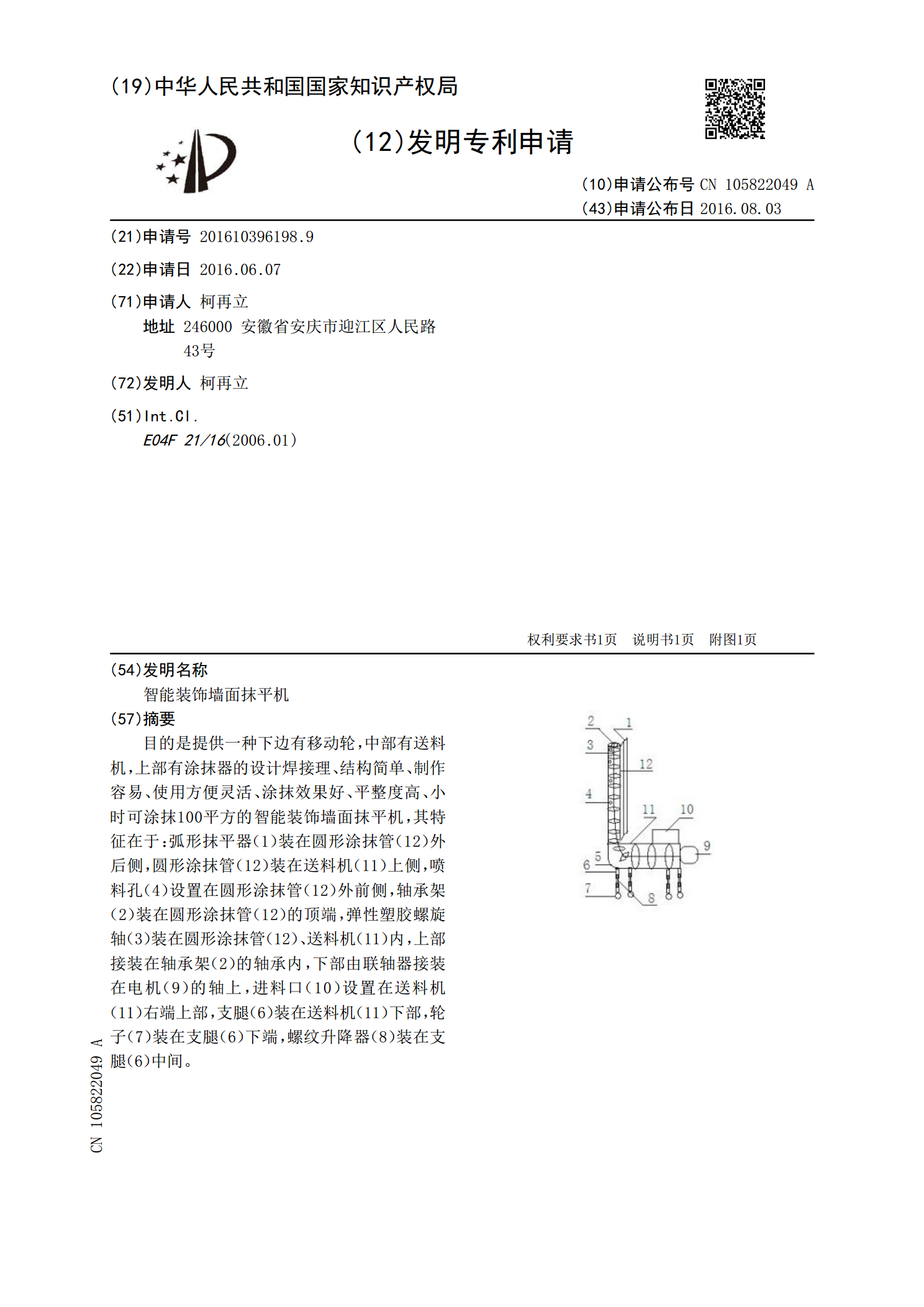
目的是提供一种下边有移动轮,中部有送料机,上部有涂抹器的设计焊接理、结构简单、制作容易、使用方便灵活、涂抹效果好、平整度高、小时可涂抹100平方的智能装饰墙面抹平机,其特征在于:弧形抹平器(1)装在圆形涂抹管(12)外后侧,圆形涂抹管(12)装在送料机(11)上侧,喷料孔(4)设置在圆形涂抹管(12)外前侧,轴承架(2)装在圆形涂抹管(12)的顶端,弹性塑胶螺旋轴(3)装在圆形涂抹管(12)、送料机(11)内,上部接装在轴承架(2)的轴承内,下部由联轴器接装在电机(9)的轴上,进料口(10)设置在送料机(

一种可自动抹平的墙面砂浆喷涂设备.pdf
本发明公开的一种可自动抹平的墙面砂浆喷涂设备,包括机体,所述机体上端面设有往复升降装置,所述往复升降装置包括设于所述机体上端面内右侧的齿轮腔,所述齿轮腔左壁中心固定设有第一电机,所述第一电机右端动力连接有动力轴,所述动力轴右端延伸至所述齿轮腔中心位置且固定设有第一螺杆,所述机体下方设有间歇行走装置,所述机体上端面且于所述往复升降装置后方设有翻转装置,本发明相对于人工喷涂和抹平砂浆,可大大地提升工作效率,解放劳动力,降低劳动强度,可在喷涂墙壁时自动前行,使得装置移动至下一块需要喷涂的区域,装置在前行时,可将