
一种并联柔索驱动上肢康复机器人及其实施方法.pdf

邻家****ng


1/10

2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种并联柔索驱动上肢康复机器人及其实施方法.pdf
本发明涉及一种并联柔索驱动上肢康复机器人及其实施方法。其技术方案是:整体由支撑架构成长方体形状的桁架结构,支撑架底部设有柔索驱动模块、张力检测模块、固定导向轮及座椅驱动电机,同时提供干净整洁的康复治疗平台;且旋转座椅位于底座的上方并可根据康复要求带动患者身体自由转动;七组柔索连接到前臂支撑,并通过前臂支撑带动患者上肢实现康复训练,有益效果是:柔索自身柔顺性好,可避免与人体发生刚性接触,提高康复训练的舒适性;康复训练过程中实时监测柔索内部张力,提高康复训练的安全性;具有被动模式、助力模式和主动模式三种康复模

一种可移动式并联柔索驱动下肢康复机器人及其实施方法.pdf
本发明涉及一种可移动式并联柔索驱动下肢康复机器人及其实施方法。包括悬吊减重单元、拉力传感器、安全背带、安全扶手、弹簧、门栏、柔索驱动单元、万向从动轮、腿部穿戴装置、跑步机、后置驱动轮、柔索、支撑架、液晶显示屏。整体由支撑架构成桁架结构,上部悬吊减重单元通过柔索连接安全背带;患者腰部运动通过连接在左右四根竖梁及安全背带之间的四组弹簧约束;机器人前部安全扶手上方设液晶显示屏;患者及轮椅通过左侧门栏进出;每侧患肢矢状面对应位置四根横梁上装四组柔索驱动单元,通过柔索牵引腿部穿戴装置带动患肢实现康复训练;机器人底部

一种并联柔索驱动下肢康复机器人.pdf
本发明公开一种并联柔索驱动下肢康复机器人,包括主体框架、驱动系统和控制系统;主体框架包括上侧框架、下侧框架和连接上侧框架与下侧框架同一端的支撑框架,上侧框架的上侧前支撑杆两端沿其长度方向分别滑动连接一个上侧前伸缩支撑杆,上侧后支撑杆两端沿其长度方向分别滑动连接一个上侧后伸缩支撑杆;驱动系统包括驱动单元、转向滑轮、柔索和下肢固定护具,通过驱动单元能够驱动柔索在转向滑轮上移动以带动下肢固定护具进行移动;控制系统包括拉压力传感器、传感器变送器、编码器、电机驱动模块和控制器,各柔索上分别连接一个拉压力传感器,各减

一种柔索并联驱动的喷涂机器人机构.pdf
本发明公开了一种柔索并联驱动的喷涂机器人机构,所述柔索并联喷涂机器人,由刚性支架、滚珠丝杠执行机构、滑轮、传动柔索、同步带、喷头以及驱动控制箱等部分组成。喷头由柔性钢索驱动,支撑柔索的滑轮可跟随螺母滑块沿导轨移动;螺母滑块由丝杆驱动,丝杆与电动机之间通过同步带传动。有益的技术效果:本发明所述的柔索并联驱动的喷涂机器人机构,采用柔索并联结构控制末端执行器,具有运动惯量小、动作灵敏等特点;驱动部分集中在底部的驱动控制箱中,使得驱动电路与外部环境隔离开来,实现防爆功能;传动部分结构紧凑,预留上下工件空间大。
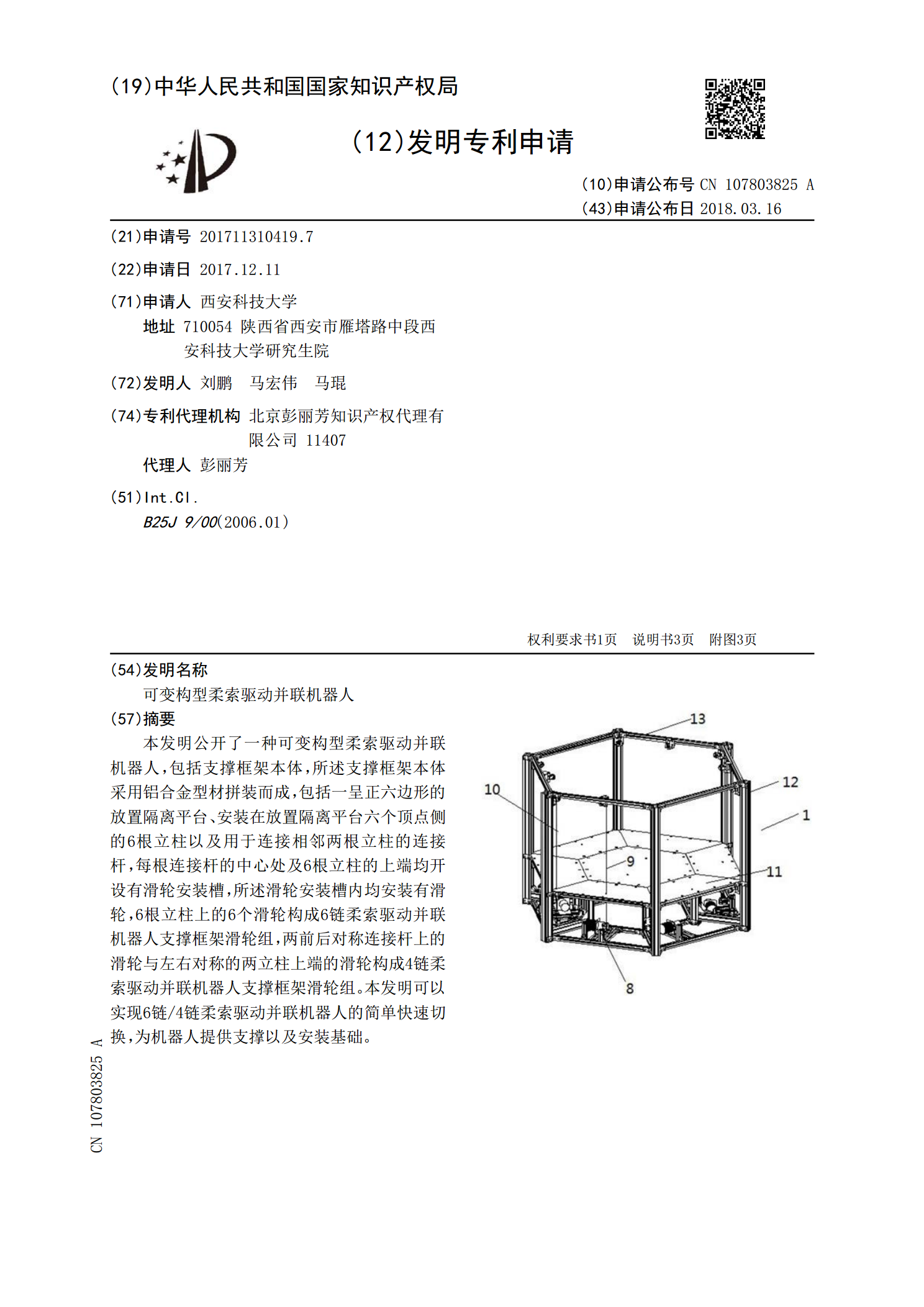
可变构型柔索驱动并联机器人.pdf
本发明公开了一种可变构型柔索驱动并联机器人,包括支撑框架本体,所述支撑框架本体采用铝合金型材拼装而成,包括一呈正六边形的放置隔离平台、安装在放置隔离平台六个顶点侧的6根立柱以及用于连接相邻两根立柱的连接杆,每根连接杆的中心处及6根立柱的上端均开设有滑轮安装槽,所述滑轮安装槽内均安装有滑轮,6根立柱上的6个滑轮构成6链柔索驱动并联机器人支撑框架滑轮组,两前后对称连接杆上的滑轮与左右对称的两立柱上端的滑轮构成4链柔索驱动并联机器人支撑框架滑轮组。本发明可以实现6链/4链柔索驱动并联机器人的简单快速切换,为机器