
一种机械拾取装置.pdf

小代****回来


1/4
2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机械拾取装置.pdf
本发明提供一种机械拾取装置,包括控制器、物料仓、机械手X轴、机械手Z轴、机械手Y轴、支撑架、治具转换装置,所述机械手X轴、机械手Z轴、机械手Y轴、支撑架构成机械手,机械手其下部设有物料仓,机械手一端设有控制器,机械手X轴上设有电控箱,机械手Z轴的下端设有治具转换装置,机械手Y轴的一端设支撑架,治具转换装置上有一号气动下料手指、二号气动下料手指。本发明提供的机械拾取装置,使用机械手自动上下料,可降低工人的劳动强度,能有效避免工伤事故的发生。

一种具有拾取芯片的机械拾取装置.pdf
本发明提供一种具有拾取芯片的机械拾取装置,包括控制器、拾取芯片、物料仓、机械手X轴、机械手Z轴、机械手Y轴、支撑架、治具转换装置,所述机械手X轴、机械手Z轴、机械手Y轴、支撑架构成机械手,机械手其下部设有物料仓,机械手一端设有控制器,机械手X轴上设有电控箱,机械手Z轴的下端设有治具转换装置,机械手Y轴的一端设支撑架,治具转换装置上有一号气动下料手指、二号气动下料手指,所述拾取芯片设置在需要下料的位置,所述控制器控制机械手到达拾取芯片位置进行下料。本发明提供的机械拾取装置,使用机械手自动上下料,可降低工人的
一种安装磁铁的机械拾取装置.pdf
本发明提供一种安装磁铁的机械拾取装置,包括控制器、物料仓、机械手X轴、机械手Z轴、机械手Y轴、支撑架、治具转换装置,所述机械手X轴、机械手Z轴、机械手Y轴、支撑架构成机械手,机械手其下部设有物料仓,机械手一端设有控制器,机械手X轴上设有电控箱,机械手Z轴的下端设有治具转换装置,机械手Y轴的一端设支撑架,治具转换装置上有一号气动下料手指、二号气动下料手指,所述一号气动下料手指和二号气动下料手指上均设置磁铁。本发明提供的机械拾取装置,使用机械手自动上下料,可降低工人的劳动强度,能有效避免工伤事故的发生。

一种拾取装置.pdf
本发明属于微小部件拾取装置技术领域,具体涉及一种拾取装置。针对现有拾取装置不宜或不能拾取变压箱等狭小空间的螺钉螺母等微小物件的不足,本发明采用如下技术方案:一种拾取装置,所述拾取装置包括:主杆;夹紧绕线轮,所述夹紧绕线轮具有手柄;夹持组件,所述夹持组件与主杆相连接,所述夹持组件包括第一夹爪和第二夹爪,所述第一夹爪和第二夹爪间设有压缩弹簧,所述第一夹爪上设有夹紧滑轮;夹紧钢丝绳,所述夹紧钢丝绳一端固接于绕线轮上并缠绕后引出,另一端缠绕第一夹爪的夹紧滑轮后与第二夹爪固接。本发明的拾取装置的有益效果是:可以通过
一种拾取装置.pdf
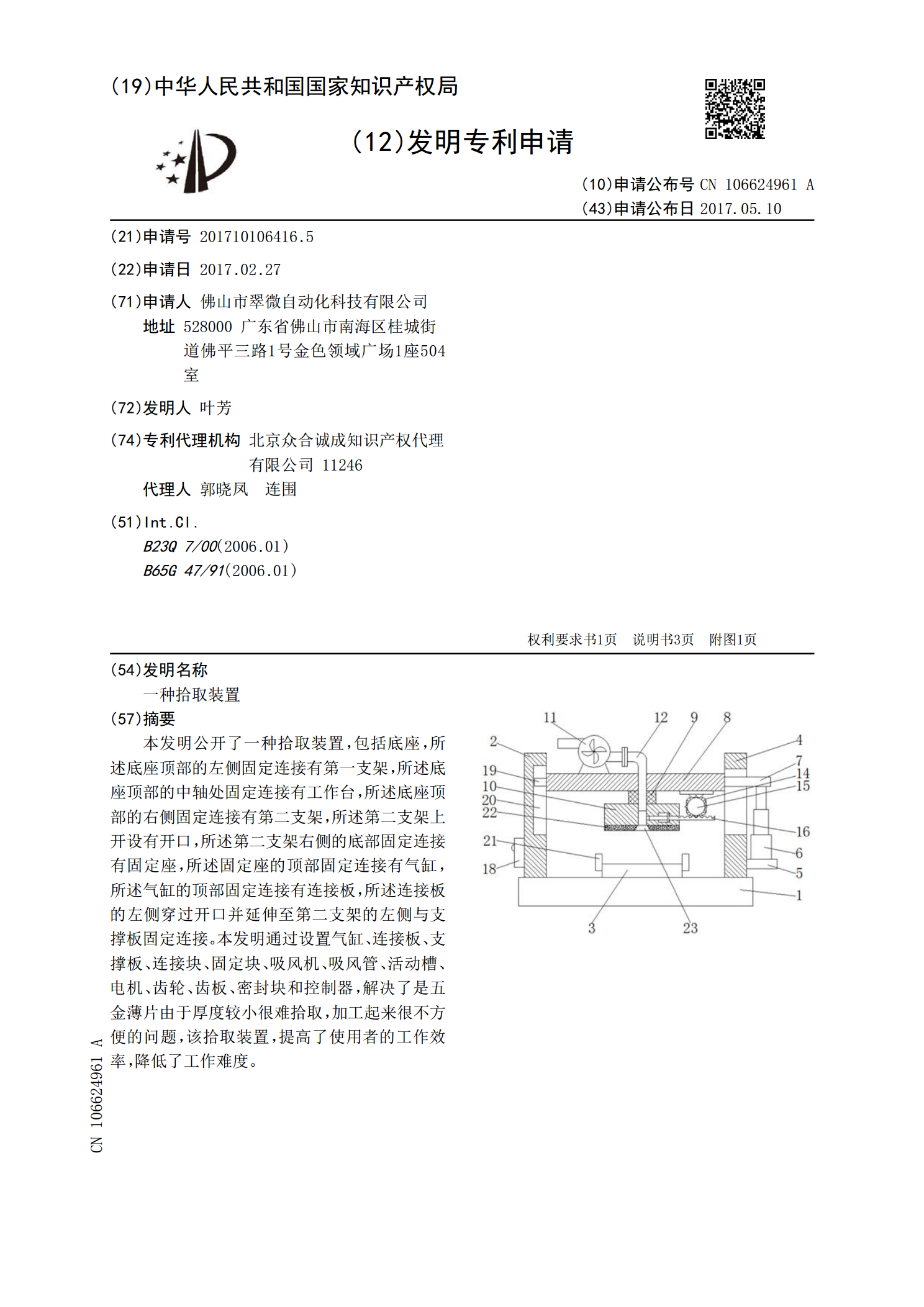
本发明公开了一种拾取装置,包括底座,所述底座顶部的左侧固定连接有第一支架,所述底座顶部的中轴处固定连接有工作台,所述底座顶部的右侧固定连接有第二支架,所述第二支架上开设有开口,所述第二支架右侧的底部固定连接有固定座,所述固定座的顶部固定连接有气缸,所述气缸的顶部固定连接有连接板,所述连接板的左侧穿过开口并延伸至第二支架的左侧与支撑板固定连接。本发明通过设置气缸、连接板、支撑板、连接块、固定块、吸风机、吸风管、活动槽、电机、齿轮、齿板、密封块和控制器,解决了是五金薄片由于厚度较小很难拾取,加工起来很不方便的