
一种机器人定位精度测试仪及接触式测量方法.pdf

mm****酱吖


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人定位精度测试仪及接触式测量方法.pdf
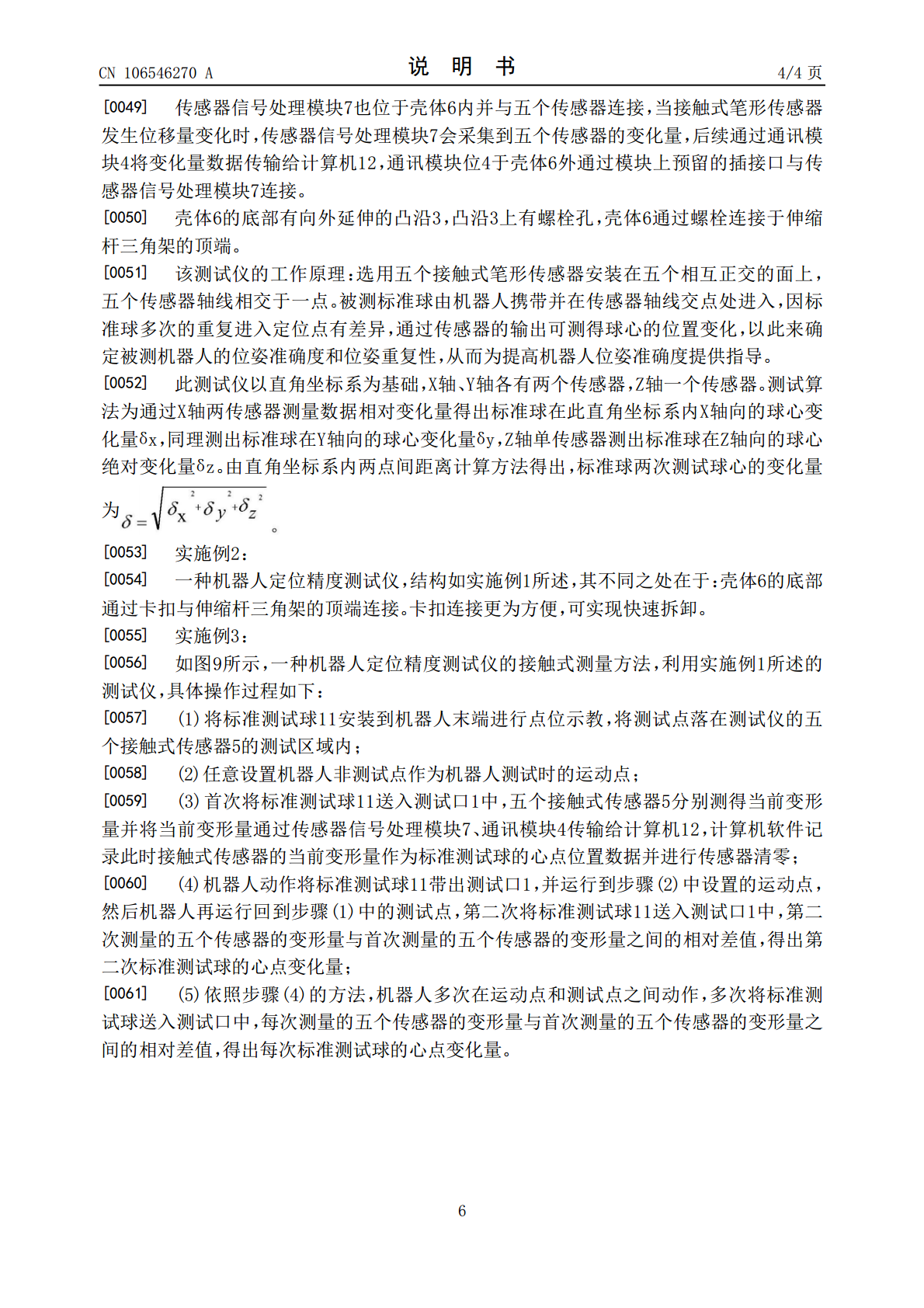
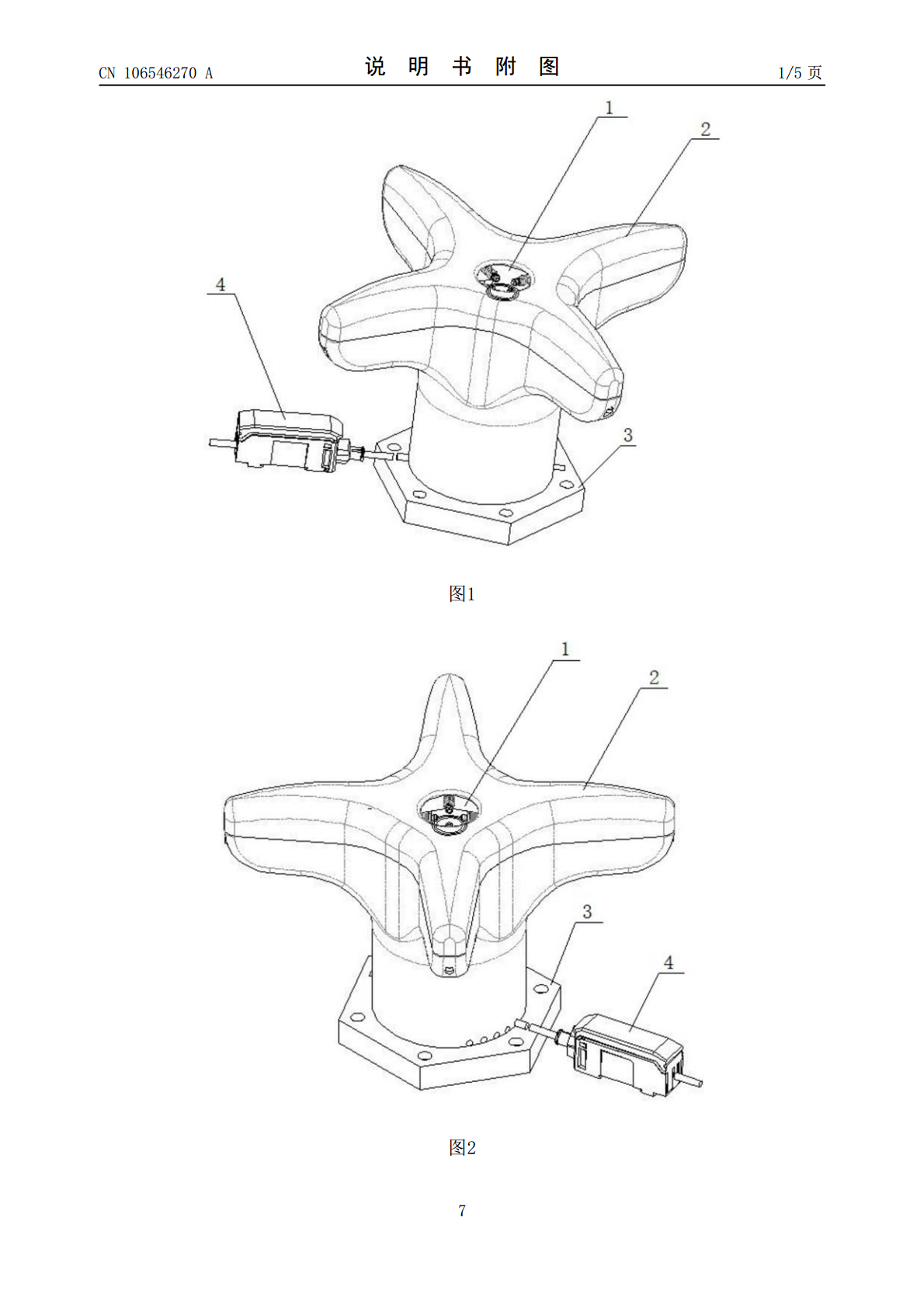
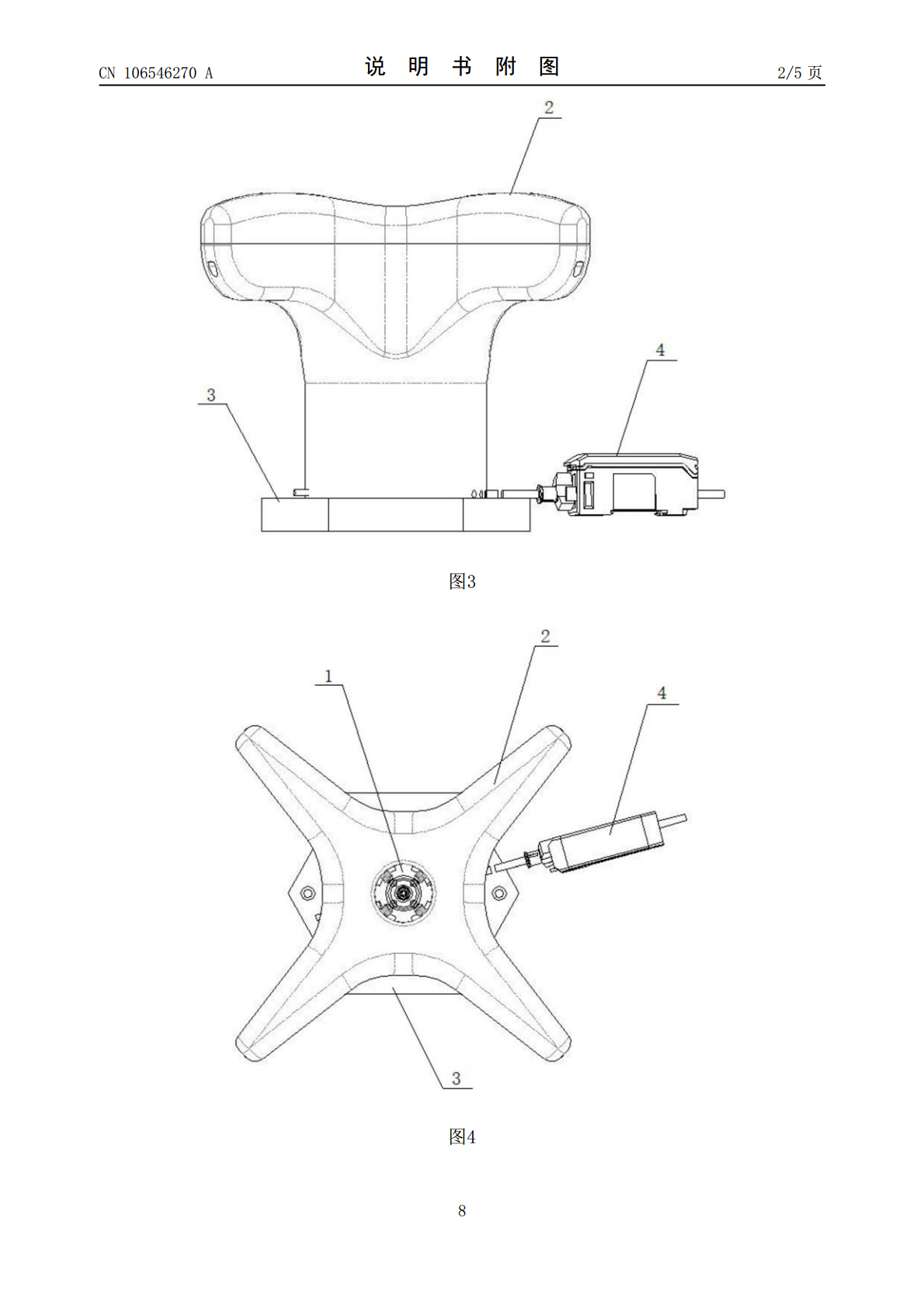
本发明涉及一种机器人定位精度测试仪及接触式测量方法,该测试仪包括测试主体、支撑架和标准测试球,其中测试主体包括用于测量的五个接触式传感器,五个接触式传感器的轴线相交于一点;支撑架与测试主体底部连接用于支撑固定测试主体。本发明测试仪设计巧妙、结构合理,采用接触式传感器并配合标准测试球,通过接触式传感器伸缩量变化计算出被测机器人的位姿准确度和位姿重复性,以此可以提高机器人位姿的准确度。本测试仪使用方便,测量过程易于操作,同时测量准确度高,其具有显著效果和良好作用。

一种简单方便的高精度非接触式阻力测量方法.docx
一种简单方便的高精度非接触式阻力测量方法标题:“一种简单方便的高精度非接触式阻力测量方法”摘要:阻力测量是许多领域中非常重要的工程问题。传统的阻力测量方法需要接触被测物体,而不接触式阻力测量方法可以提供更高的精度和便利性。本论文提出了一种简单方便的高精度非接触式阻力测量方法,该方法利用光学传感器和数学模型,实现了对多种形状物体的阻力测量。引言:阻力测量在工程领域中具有广泛应用,例如流体力学、风洞试验等。传统的阻力测量方法需要接触被测物体,这可能会引入额外的误差并且对被测物体产生干扰。因此,开发一种简单方便
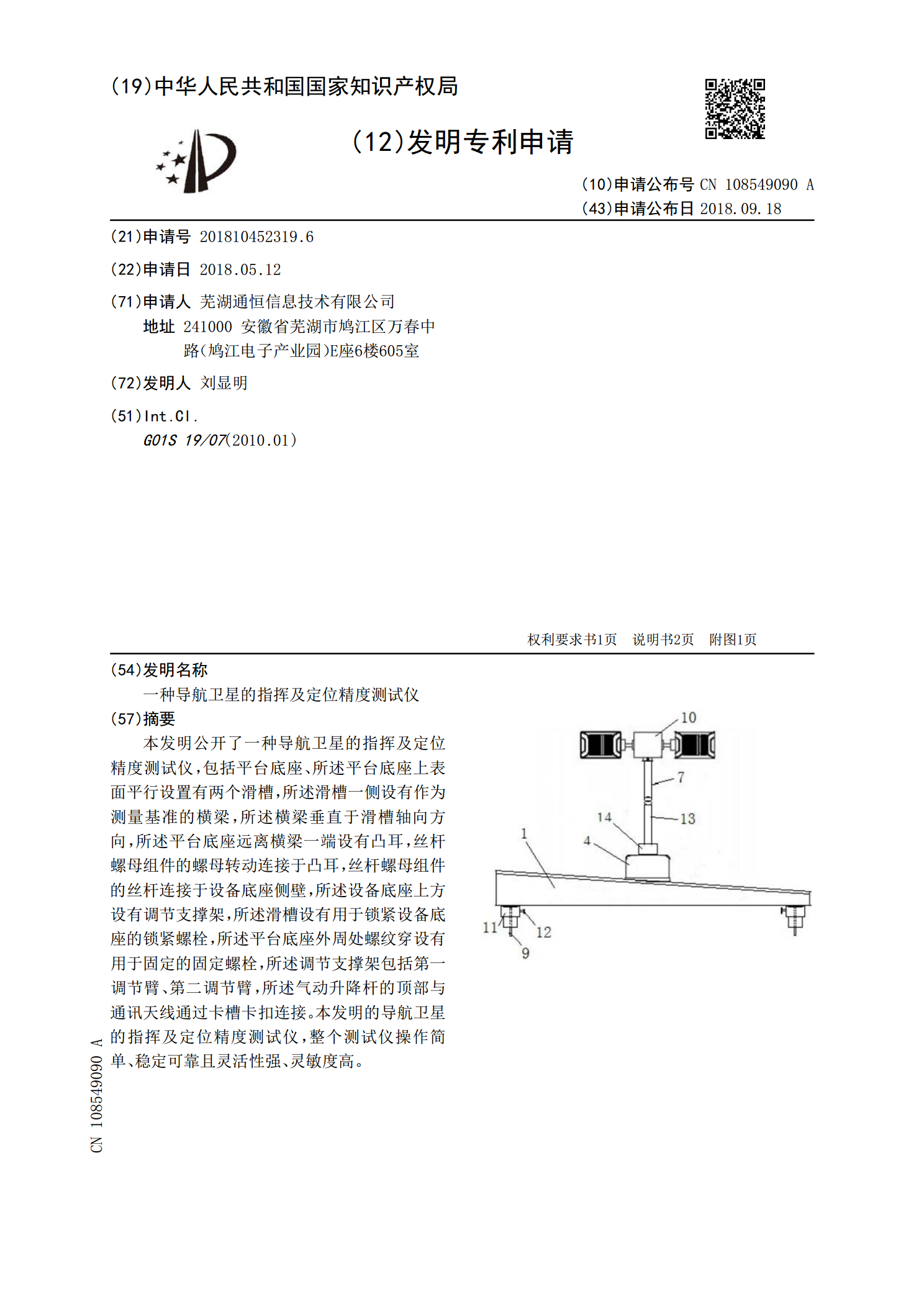
一种导航卫星的指挥及定位精度测试仪.pdf
本发明公开了一种导航卫星的指挥及定位精度测试仪,包括平台底座、所述平台底座上表面平行设置有两个滑槽,所述滑槽一侧设有作为测量基准的横梁,所述横梁垂直于滑槽轴向方向,所述平台底座远离横梁一端设有凸耳,丝杆螺母组件的螺母转动连接于凸耳,丝杆螺母组件的丝杆连接于设备底座侧壁,所述设备底座上方设有调节支撑架,所述滑槽设有用于锁紧设备底座的锁紧螺栓,所述平台底座外周处螺纹穿设有用于固定的固定螺栓,所述调节支撑架包括第一调节臂、第二调节臂,所述气动升降杆的顶部与通讯天线通过卡槽卡扣连接。本发明的导航卫星的指挥及定位精

一种基于视觉引导的机器人多孔接触式自动测量方法.pdf
本发明针对一种具有多个深孔的工件,提供了一种在视觉的引导下,机器人运用接触式测量自动测量深孔的孔径、垂直度等参数的方法,属于机器人测量领域。其主要步骤有,对视觉系统进行标定;标定工件坐标系;获取工件上待测圆孔的空间位置;对工件上的圆孔进行编号,从而对测量路径进行规划;视觉引导机器人运动到起始测量位置并监控测量过程。所述对待测量工件的标定,发明了一种借助视觉对工件进行标定的方法;在对圆孔进行编号的过程中,发明了一种能够使视觉识别到的圆孔能与实际工件上的圆孔一一对应的编号方法;在测量过程中,发明了一种避免测针
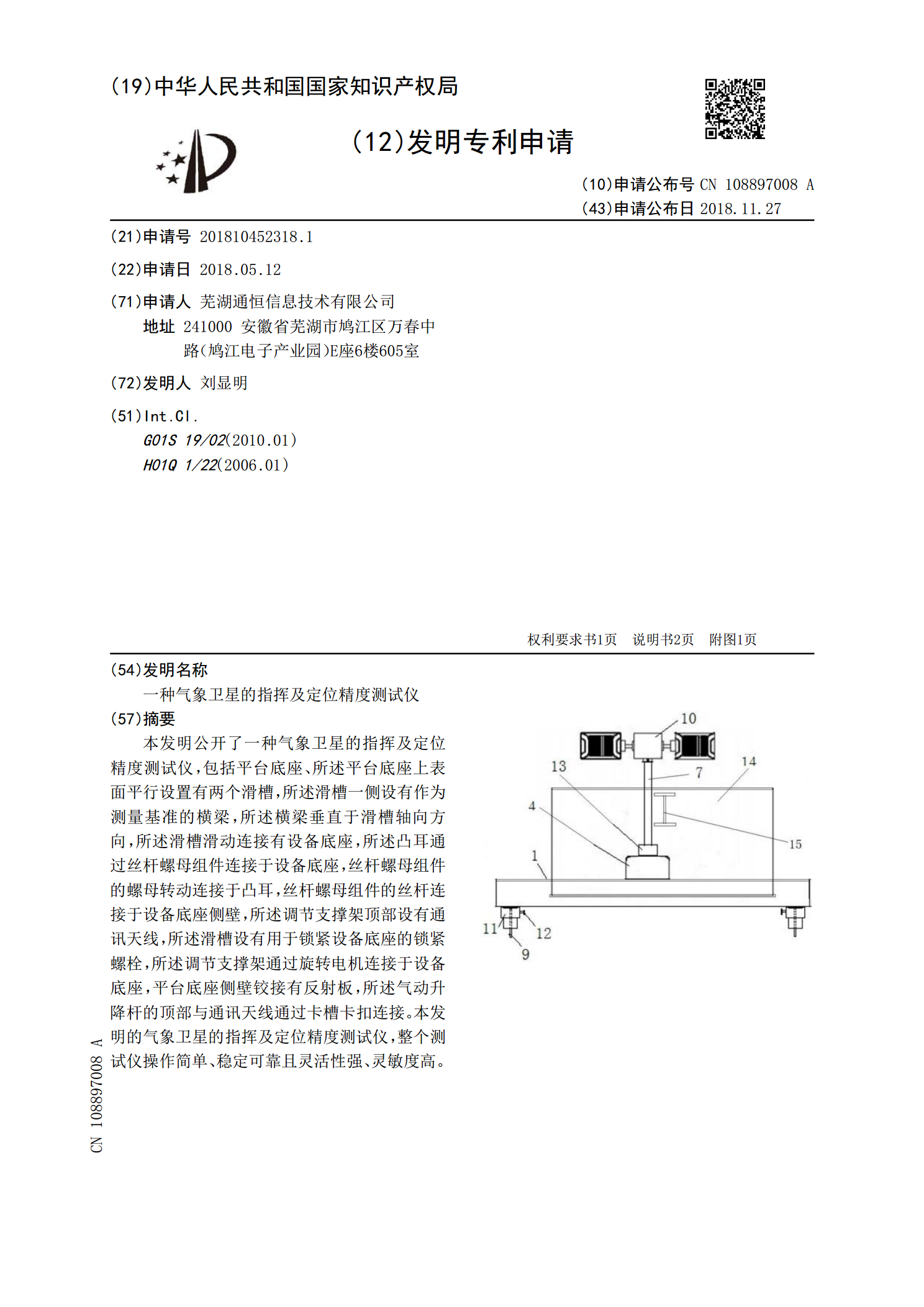
一种气象卫星的指挥及定位精度测试仪.pdf
本发明公开了一种气象卫星的指挥及定位精度测试仪,包括平台底座、所述平台底座上表面平行设置有两个滑槽,所述滑槽一侧设有作为测量基准的横梁,所述横梁垂直于滑槽轴向方向,所述滑槽滑动连接有设备底座,所述凸耳通过丝杆螺母组件连接于设备底座,丝杆螺母组件的螺母转动连接于凸耳,丝杆螺母组件的丝杆连接于设备底座侧壁,所述调节支撑架顶部设有通讯天线,所述滑槽设有用于锁紧设备底座的锁紧螺栓,所述调节支撑架通过旋转电机连接于设备底座,平台底座侧壁铰接有反射板,所述气动升降杆的顶部与通讯天线通过卡槽卡扣连接。本发明的气象卫星的