
一种基于多尺度深度卷积神经网络的全场位移在线识别方法.pdf

努力****绮亦

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多尺度深度卷积神经网络的全场位移在线识别方法.pdf
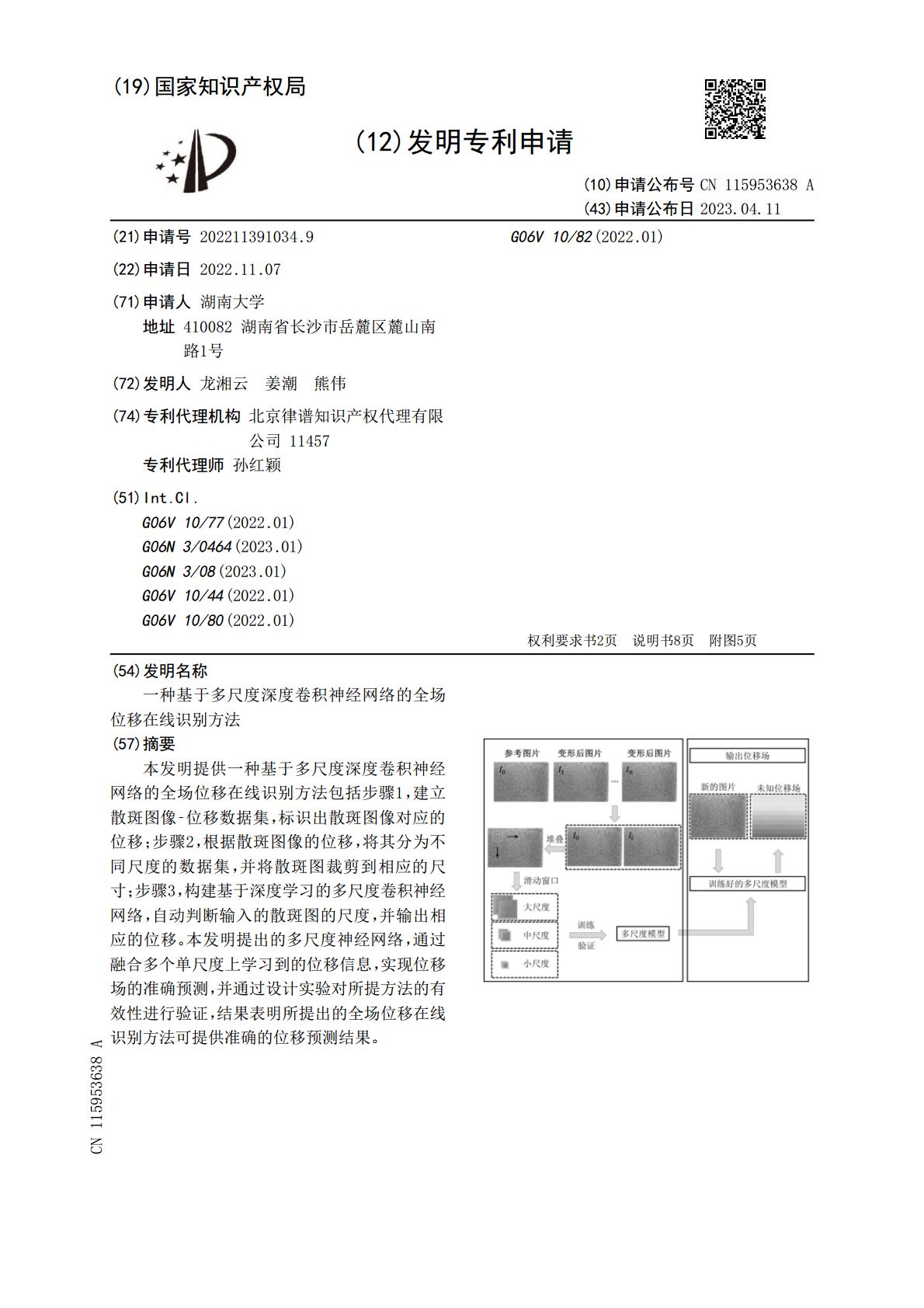
本发明提供一种基于多尺度深度卷积神经网络的全场位移在线识别方法包括步骤1,建立散斑图像‑位移数据集,标识出散斑图像对应的位移;步骤2,根据散斑图像的位移,将其分为不同尺度的数据集,并将散斑图裁剪到相应的尺寸;步骤3,构建基于深度学习的多尺度卷积神经网络,自动判断输入的散斑图的尺度,并输出相应的位移。本发明提出的多尺度神经网络,通过融合多个单尺度上学习到的位移信息,实现位移场的准确预测,并通过设计实验对所提方法的有效性进行验证,结果表明所提出的全场位移在线识别方法可提供准确的位移预测结果。

基于多尺度卷积神经网络的雷达HRRP目标识别方法.pdf
本发明公开了一种基于多尺度卷积神经网络的雷达HRRP目标识别方法,该方法首先进行预处理降低HRRP样本中的敏感性,然后后接的多尺度卷积神经网络可在保留HRRP样本内所蕴含的序列相关性同时,提取出HRRP包络中所含的信息,最后采用基于RNN的深度学习方法进行目标识别:该方法基于序列相关性进行建模,对物理结构特征进行建模描述,最后通过softmax进行分类识别。
一种基于多尺度卷积神经网络的被动水声目标识别方法.pdf
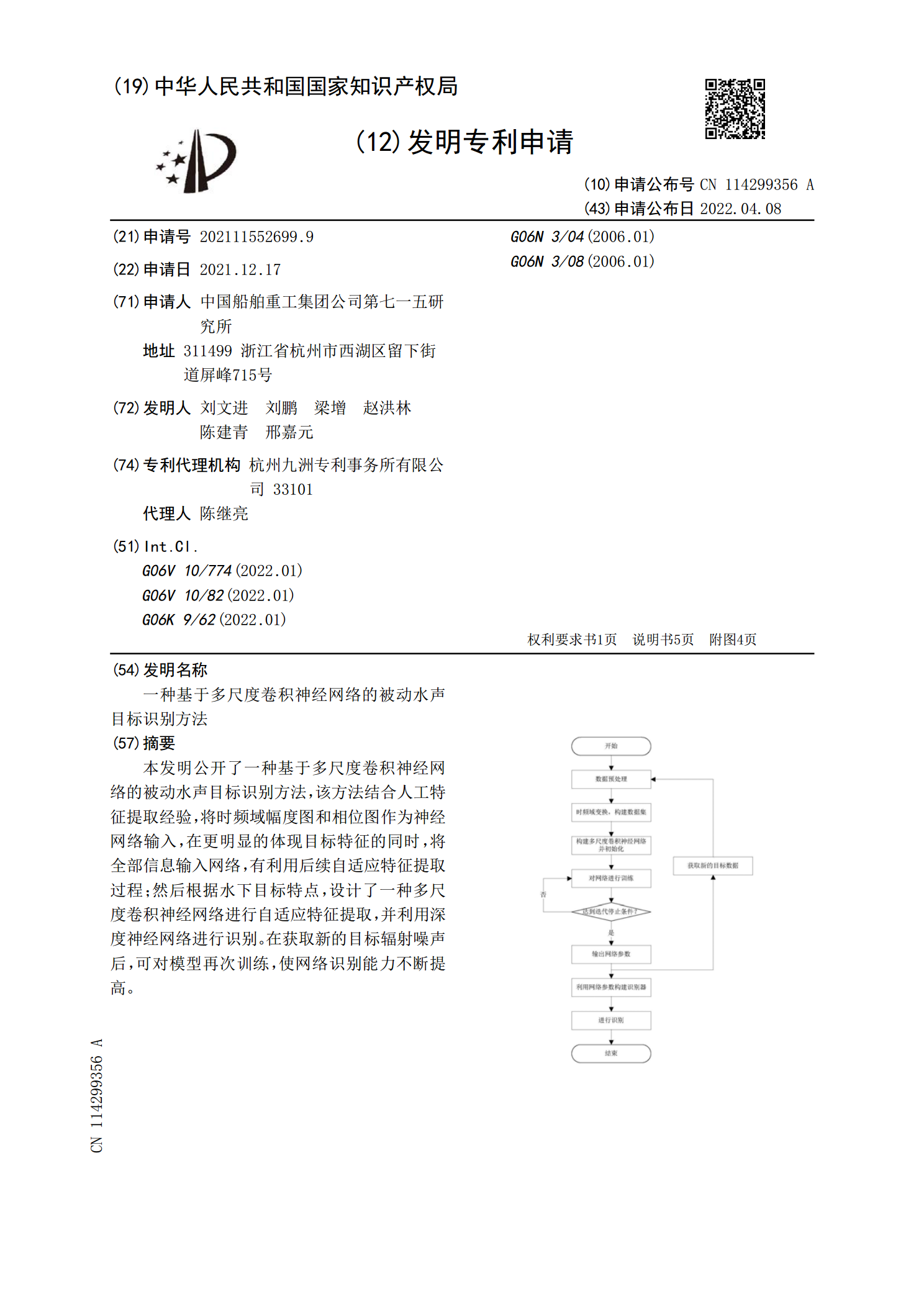
本发明公开了一种基于多尺度卷积神经网络的被动水声目标识别方法,该方法结合人工特征提取经验,将时频域幅度图和相位图作为神经网络输入,在更明显的体现目标特征的同时,将全部信息输入网络,有利用后续自适应特征提取过程;然后根据水下目标特点,设计了一种多尺度卷积神经网络进行自适应特征提取,并利用深度神经网络进行识别。在获取新的目标辐射噪声后,可对模型再次训练,使网络识别能力不断提高。

一种基于深度卷积神经网络的菜谱识别方法.pdf
本发明公开了一种基于深度卷积神经网络的菜谱识别方法,包括以下步骤:步骤1:采集N类菜谱的图像并按类进行筛选;步骤2:对筛选后的图像进行预处理;步骤3:用经过预处理后的菜谱图像训练模型;步骤4:采集待检测菜谱图像并进行预处理;步骤5:根据步骤3得到的训练好的模型用步骤4得到的预处理后的图像作为输入进行菜谱检测;步骤6:根据步骤5的检测结果就可以得到待识别菜谱图像的3‑5种相似度最高的选择菜谱。

一种基于多尺度检测的深度神经网络.pdf
本发明一种基于多尺度检测的深度神经网络,在不同的网络层上设置多个检测网络,这样就解决了尺度变化的问题,即可以检测出小物体也可以检测大物体;在同一个网络层上设置多个不同大小不同形状的检测器,这样就解决了形状变化的问题;设置一个全新的合并层,将上面多个检测结果进行合并,共下面的分类网络使用;为了同时保留低层的细节信息和高层的全局信息,使用了一个特殊的反卷积层,对高层的特征层进行升维处理,并和低层的特征层进行特征合并,形成了新的特征图,然后对这个新的特征层进行ROIPooling处理,本发明大大缓解了深度神经