
一种基于视觉与时空融合估计的跨域行人重识别方法.pdf

一吃****天材


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于视觉与时空融合估计的跨域行人重识别方法.pdf
本发明涉及一种基于视觉与时空融合估计的跨域行人重识别方法,该方法包括:S1、源域中训练初始视觉分类器;S2、提取目标域中无标签行人图像视觉特征,计算特征相似度,并保存时空信息;S3、构建Weibull分布方程估计目标域时空模型;S4、将源域视觉分类器与目标域时空模型进行融合估计得到联合评分并排序;S5、根据排序结果选取难样本挖掘三元组更新视觉分类器模及时空融合模型;S6、根据相似度联合评分对跨摄像头下行人编号聚类重新分配编号并显示可视化结果。与现有技术相比,本发明解决了目标域为开放集时很难标注数据的问题,

一种基于双聚类协作学习的跨域行人重识别方法.pdf
本发明涉及一种基于双聚类协作学习的跨域行人重识别方法。包括如下步骤:1:利用风格迁移模型实现源域和目标域之间的迁移,之后两个特征提取模型Net1和Net2分别在源域和源域生成图像集上进行监督学习;2:利用Net1和Net2对目标域和目标域生成图像集进行特征提取,之后利用DBSCAN方法对特征进行聚类;3:核对聚类结果,选取高置信度的结果分别优化Net1和Net2。本发明设计的双聚类方法通过核对两个域上的聚类结果,为模型优化选取了具有高置信度的样本对,最终提升了模型在目标域上的识别性能。

基于特征融合的行人重识别方法.docx
基于特征融合的行人重识别方法基于特征融合的行人重识别方法随着摄像监控技术的不断发展,行人重识别技术在实际应用中变得越来越广泛。传统的行人重识别方法通常基于手工设计的特征,有效性受限。针对这个问题,近年来研究者们开始探索使用深度学习进行特征提取和融合,以提高行人重识别的准确性和鲁棒性。本文将介绍基于特征融合的行人重识别方法。1.基于深度学习的特征提取深度学习在人类视觉任务中取得了巨大成功。使用深度学习进行特征提取可以避免手工特征的限制,并在行人重识别领域中取得了显著的成果。目前,基于深度学习的行人重识别方法
一种基于多尺度特征融合的行人重识别方法.pdf
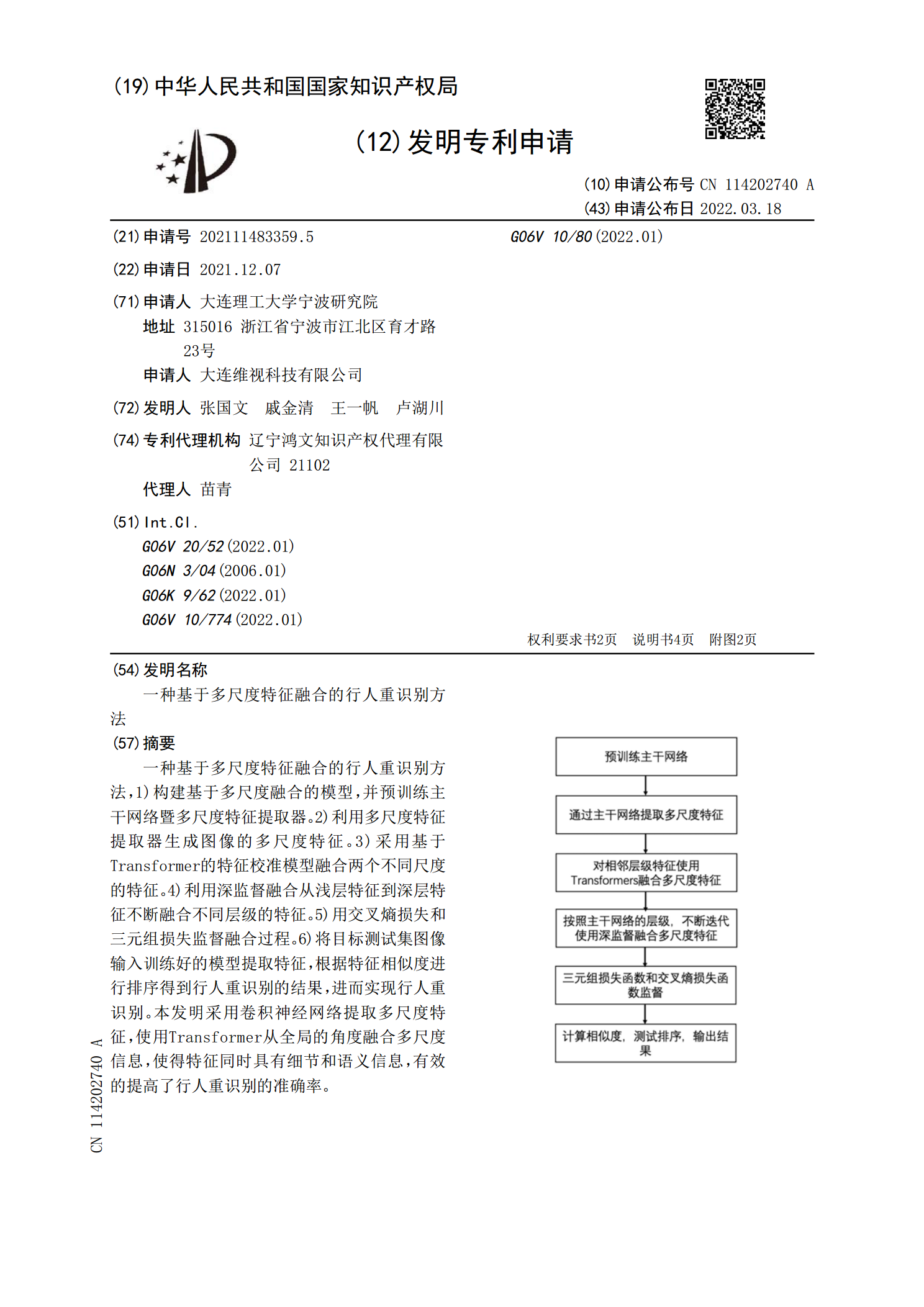
一种基于多尺度特征融合的行人重识别方法,1)构建基于多尺度融合的模型,并预训练主干网络暨多尺度特征提取器。2)利用多尺度特征提取器生成图像的多尺度特征。3)采用基于Transformer的特征校准模型融合两个不同尺度的特征。4)利用深监督融合从浅层特征到深层特征不断融合不同层级的特征。5)用交叉熵损失和三元组损失监督融合过程。6)将目标测试集图像输入训练好的模型提取特征,根据特征相似度进行排序得到行人重识别的结果,进而实现行人重识别。本发明采用卷积神经网络提取多尺度特征,使用Transformer从全局的

基于多尺度特征融合的行人重识别方法.docx
基于多尺度特征融合的行人重识别方法基于多尺度特征融合的行人重识别方法摘要:行人重识别是计算机视觉领域中的一个重要研究课题,它的目标是通过查询数据库中存储的多个场景中的行人图像,从中找出与查询图像相似的行人图像。在行人重识别中,多尺度特征融合是提高匹配精度的关键。本论文介绍了一种基于多尺度特征融合的行人重识别方法,通过将不同尺度的特征进行融合,提高了行人重识别的准确性和鲁棒性。实验证明,该方法在行人重识别任务中取得了优异的性能。关键词:行人重识别,多尺度特征融合,准确性,鲁棒性第一章引言1.1研究背景与意义